

我配置的是Canfd,用CanOE工具发,树莓派扩展的这个CanFd模块收,但我发送的Canfd数据BRS=0时,树莓派是可以正常收到的,如果BRS=1,CanOE工具会显示错误帧,树莓派也是错误帧,我BitTimingFd配置也跟Canoe配置对比了确实是一样的,不知道为什么就是BRS=1,就是不通,能帮忙解答一下吗
CanOe发送
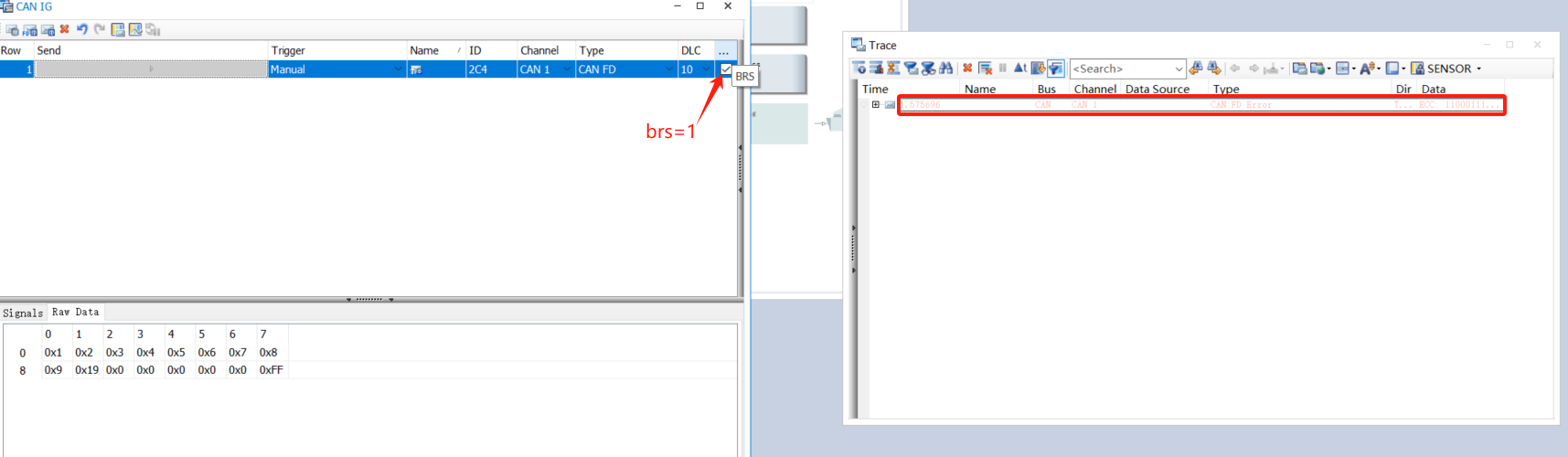
树莓派接收到的Can数据:

代码:
可以肯定的是BitTimingFd配置跟CanOe上是一致的
from email.policy import strict
from enum import Flag
import os
import can
import threading
import time
from pprint import pprint
from threading import Lock
import cantools
from pprint import pprint
import traceback
exitSig = ''
mux = Lock()
os.system('sudo ip link set can1 up type can bitrate 500000 dbitrate 4000000 restart-ms 1000 berr-reporting on fd on')
bit_timingfd = can.BitTimingFd(
f_clock=80_000_000,
nom_brp=2,
nom_tseg1=55,
nom_tseg2=24,
nom_sjw=2,
data_brp=2,
data_tseg1=6,
data_tseg2=3,
data_sjw=1,
strict = False,
)
print(bit_timingfd)
can1 = can.interface.Bus(channel = 'can1', bustype = 'socketcan', bit_timing_fd = bit_timingfd, fd = True)# socketcan_native
#can1 = can.ThreadSafeBus(channel = 'can1', bustype = 'socketcan', bit_timing_fd = bit_timingfd, fd = True)# socketcan_native
send_msg = can.Message(is_extended_id=False, arbitration_id=0x580, data=[0, 0, 0, 0, 0, 0, 0, 0], is_fd = False, is_rx = False, bitrate_switch = False, channel = 'can1')
db = cantools.database.load_file('/home/Public/FAW_E001R_PCDU_CANMatrix_V0.9_20230616.dbc') #Open a dbc file. (arxml, dbc)
def Can1SendCbk(msg):
msg.timestamp = time.time()
print(msg)
def PackDbcMsg():
example_message = db.get_message_by_name('VDC_Config')
print(example_message.signal_tree)
data = example_message.encode({'VDC_OTAMode': 6, 'VDC_PowerMode': 12, 'Reserved28':0, 'Reserved30':0, 'Reserved29':0})
message = can.Message(arbitration_id=example_message.frame_id, data=data)
return message
def Can1SendMsgMain(arg_send_msg, period, num):
task = can1.send_periodic(arg_send_msg, period, num*period, modifier_callback = Can1SendCbk)
assert isinstance(task, can.CyclicSendTaskABC)
return task
'''
Receive can message and switch to dbc file output.
'''
duty = 0
frequency = 0
wakeupId = 0
def OuputDbcMsg(revMsg):
global duty
global frequency
global wakeupId
if revMsg.arbitration_id != 0x3EE and revMsg.arbitration_id != 0x585:
return
if revMsg.arbitration_id == 0x3EE:
exList = [0,0,0,0,0,0,0,0]
revMsg.data.extend(exList) #data tail append many member
print(revMsg)
try:
dbMsg = db.decode_message(revMsg.arbitration_id, revMsg.data)
except:
#Output error
traceback.print_exc()
else:
duty = dbMsg['Charger_CPPWMDuty']
frequency = dbMsg['Charger_CPfrequency']
elif revMsg.arbitration_id == 0x585:
print(revMsg)
try:
dbMsg = db.decode_message(revMsg.arbitration_id, revMsg.data)
except:
#Output error
traceback.print_exc()
else:
wakeupId = dbMsg['CCU_Source_Node_ID']
else:
pass
print('Charger_CPPWMDuty:', duty)
print('Charger_CPfrequency:', frequency)
print('CCU_Source_Node_ID:', wakeupId)
def Can1ReceiveMsgMain():
global exitSig
while True:
mux.acquire()
if exitSig == "#":
mux.release()
return
msg = can1.recv(5.0)
if msg is None:
print('Timeout occurred, no message.')
else:
OuputDbcMsg(msg)
if msg.arbitration_id != 0x088:
print(msg)
mux.release()
def enxitFunc():
global exitSig
while True:
exitSig = input()
if exitSig == '#':
break
print("Close cmd:", exitSig)
def main():
t2 = threading.Thread(target=Can1ReceiveMsgMain)
t3 = threading.Thread(target=enxitFunc)
# 启动线程
t2.start()
t3.start()
#Can1SendMsgMain(send_msg, 1.0, 0)
# 等待线程执行完成
t2.join()
t3.join()
can1.stop_all_periodic_tasks()
can1.shutdown()
os.system('sudo ifconfig can1 down')
print("======CLOSE======")
if __name__ == '__main__':
main()

