







树莓派WAVEGO仿生四足机器狗12自由度 基于ESP32和PI4B开源 人脸识别 颜色追踪 运动检测
¥1490
具有高自由度的仿生四足机器狗,2.3kg.cm 大扭矩舵机,结构可靠、动作灵活丰富,集成了摄像头、9 轴运动跟踪器、RGB 等设备于一身并开源了可跨平台使用的 Web 应用。以 ESP32 作为下位机进行连杆逆解和步态生成,为上位机分担算力,可以安装树莓派作为上位机来运算高阶决策。
【产品简介】
[] 具有高自由度的仿生四足机器狗,2.3kg.cm 大扭矩舵机,结构可靠、动作灵活丰富,集成了摄像头、9 轴运动跟踪器、
RGB 等设备于一身并开源了可跨平台使用的 Web 应用。以 ESP32 作为下位机进行连杆逆解和步态生成,
为上位机分担算力,可以安装树莓派作为上位机来运算高阶决策。
【产品特性】
[] 整机 12 个自由度,腿部多连杆结构设计,增大了舵机的有效力矩
[] 一个实时操作系统作为下位机用于步态生成和连杆逆解,为上位机分担算力负担并提升步态解算效率
[] 超紧凑的结构设计,可以放在桌面使用,结构使用铝合金+惠普尼龙材质,减轻重量的同时也保证了强度
[] 可扩展树莓派作为上位机使用,可使用 OpenCV 相关的高阶功能,例程包含人脸检测,运动检测,颜色追踪等功能。
为二次开发预留了扩展接口,并配有丰富的使用文档和二次开发文档
【套餐版本选择】

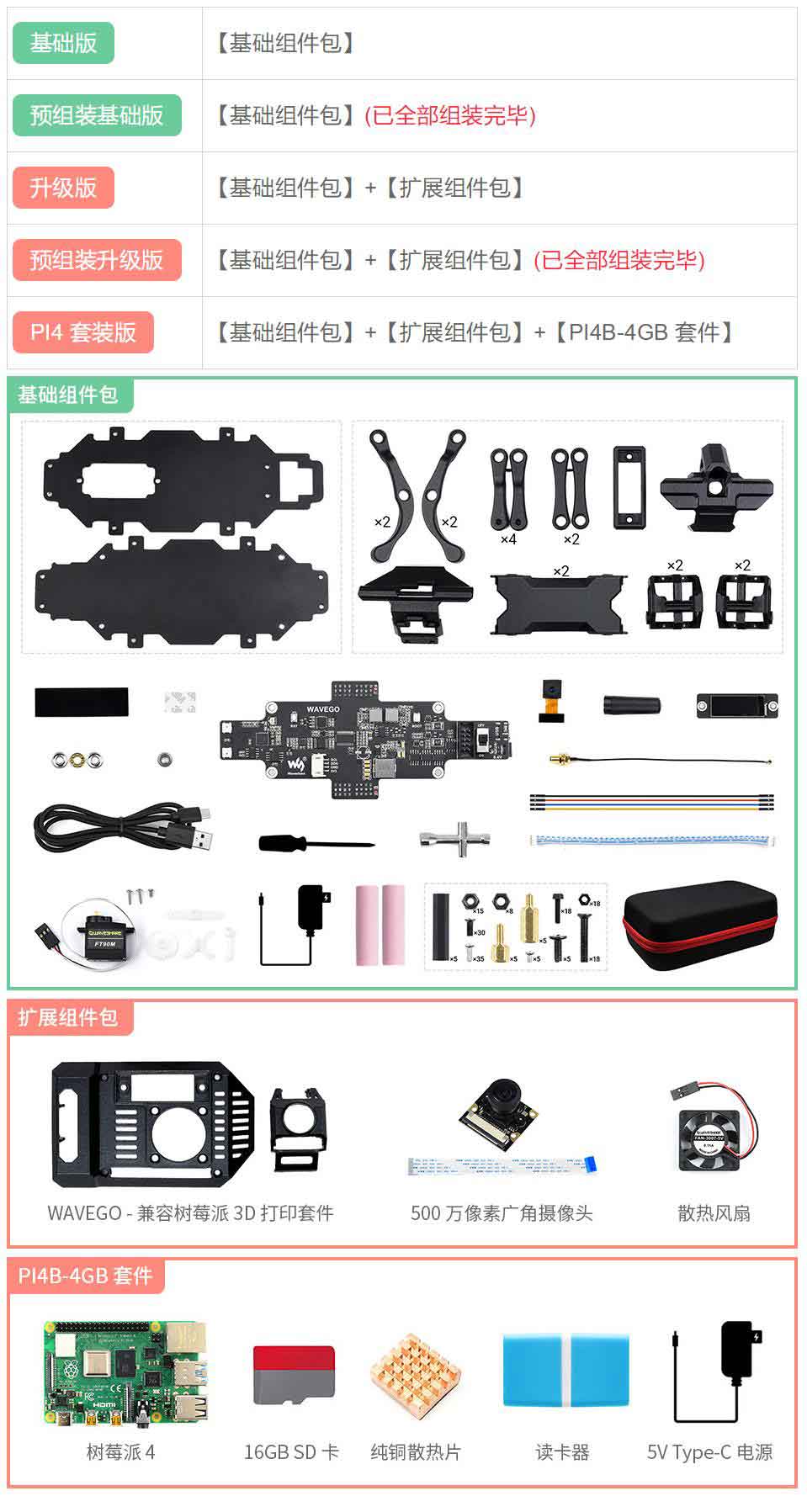
【树莓派 4 代主控板】
[] 更强悍的处理器,更丰富的多媒体性能,更出色的连接性

【高自由度 动作更灵活】
[] 整机 12 个自由度,腿部采用多连杆腿部结构 + 逆运动学算法,可大幅提升舵机有效扭矩
【超紧凑结构设计】
[] 结构件由 5052 铝合金和 PA12 尼龙件组成,全身各关节共使用 40 套轴承,结构坚固可靠,减轻重量的同时也保证了强度
【姿态自平衡】
[] 内置高精度 9 轴运动跟踪器 ICM20948 可以适应各种地形环境,控制自身平衡,尽可能保持摄像头水平状态
【500 万像素 160 度广视角*】
[] 可使用人脸识别/颜色追踪/运动检测等基于 OpenCV 开发的功能
* 仅升级版和 PI4 套装版含有此像素和广视角

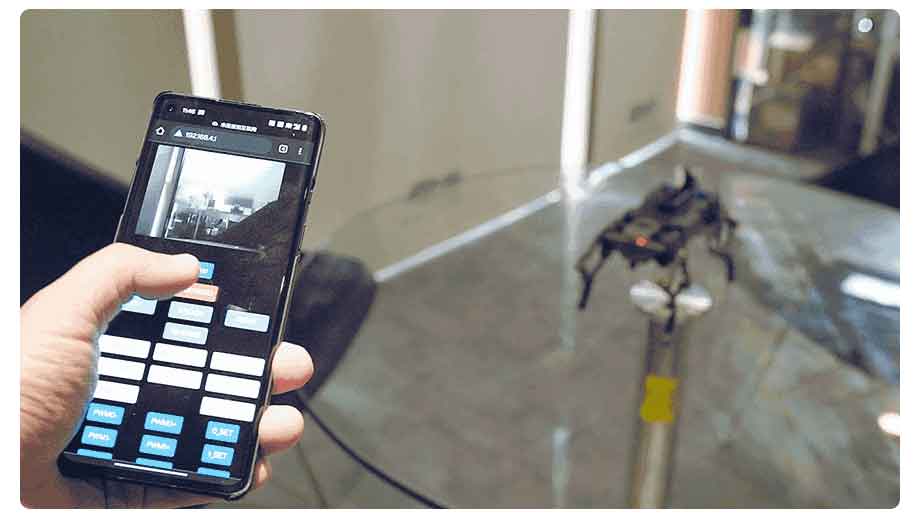
【登录 Web 就可远程控制】
[] 不需要手动配置编译环境,开机自动建立 WIFI 热点
可使用手机或电脑浏览器连接并登录到控制页面,不需要下载 app
【高阶功能开发】
[] 可以安装树莓派作为上位机通过串口与下位机通信
ESP32 作为下位机可以分担很多连杆逆解和步态生成的算力
留给树莓派更多的资源用于高阶功能开发

【高度集成的扩展板】
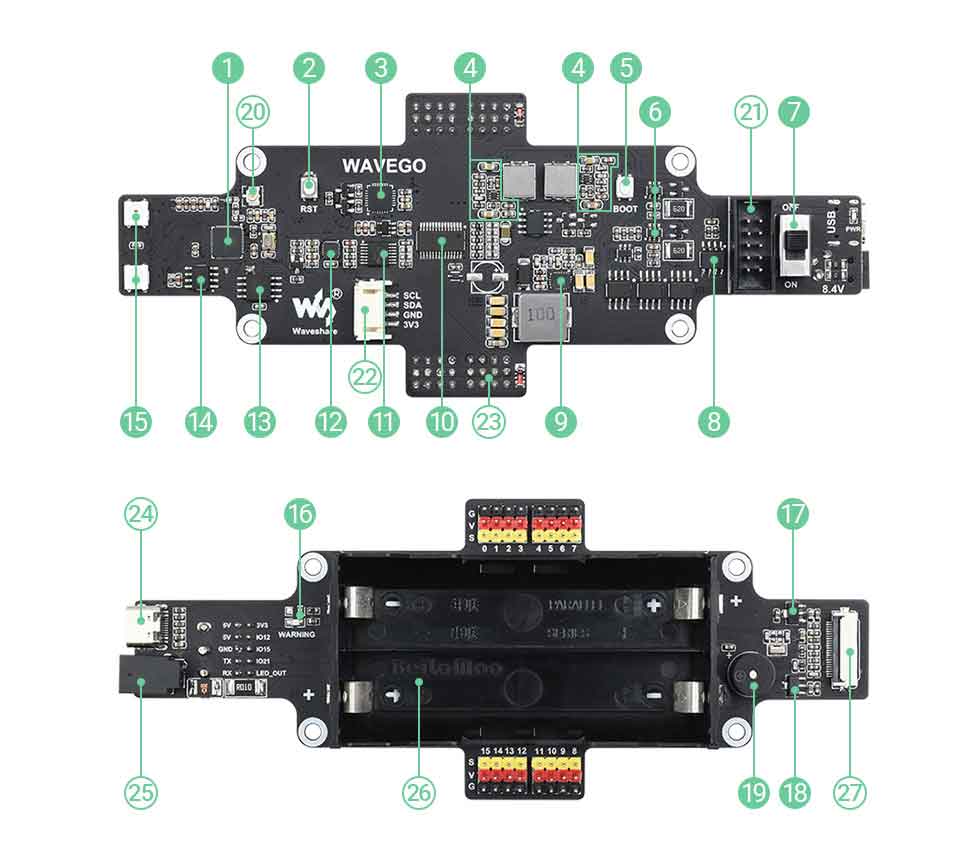

【资源简介】


【外形尺寸】









