

General-Driver-for-Robots教程
资料
开源例程
原理图
尺寸图纸
模型
说明
产品概述
专为机器人设计的多功能驱动板,为机器人搭建提供更多可能。
基于ESP32-WROOM-32模组,可以使用Arduino IDE进行开发,支持多种无线通信方式,包括WIFI、蓝牙、ESP-NOW。板载多种常用的机器人组件接口,包括:带编码器的直流电机接口、无编码器的直流电机接口、总线舵机接口、IIC接口、激光雷达接口、PWM舵机接口、SD卡槽等。
板载多种资源,方便机器人项目搭建,包括:9轴IMU、温度传感器、自动下载电路、激光雷达串口转USB电路、总线舵机控制电路等。
产品特性
- 基于ESP32-WROOM 模组,支持WIFI、蓝牙和ESP-NOW无线通信方式。
- 板载电机控制接口,可控制4个(2组)不带编码器的直流电机或2个带编码器的直流电机。
- 板载总线舵机控制接口,可控制多大253个ST3215总线舵机并获取舵机反馈。
- 板载九轴IMU,可随时获取姿态和航向信息。
- 7-13V电压输入,可使用2S或3S锂电池直接供电。
- 带有自动下载电路,方便上传程序。
- 输入电压电流检测。
- 板载Micro SD卡槽。
- 板载激光雷达接口,并集成了串口转USB功能。
- IIC接口,可用于扩展其它OLED外设。
- 多功能扩展接口,引出了剩余接口用于扩展其它功能,例如控制舵机或继电器。
- 40PIN扩展接口,可用来连接树莓派等上位机,通过串口或IIC通信,并为上位机供电。
- 开源板载资源的使用例程,并配有详细教程方便新手入门。
产品参数
| 主控模组 | ESP32-WROOM-32 |
| 供电电压 | DC 7-13V |
| 供电接口 | XH2.54 |
| 天线接口 | IPEX1 |
| 下载接口 | Type-C |
| 主控芯片 | ESP32 |
| 无线通信方式 | WIFI、蓝牙、ESP-NOW |
| 产品尺寸 | 65 X 65mm |
| 定位孔间距 | 49 X 58mm |
| 定位口直径 | 3mm |
板载接口
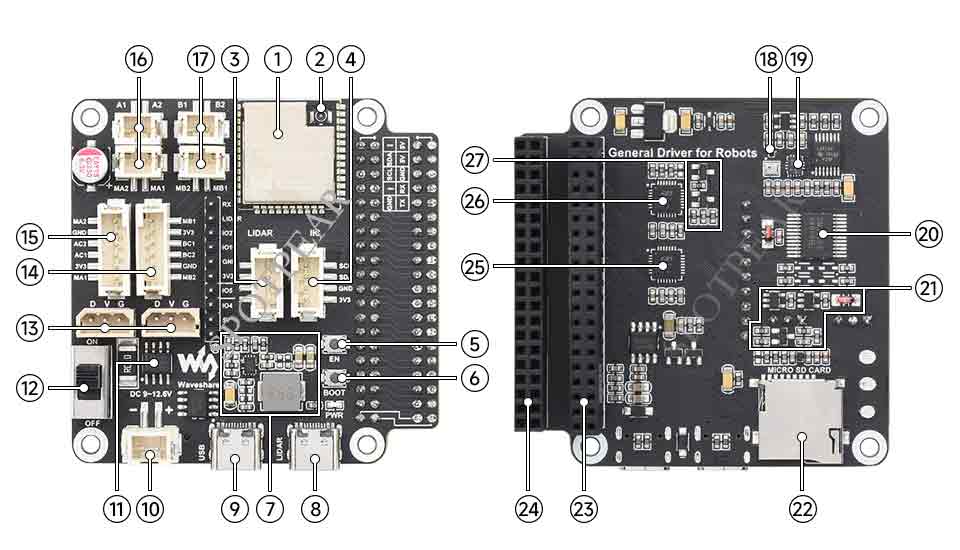
| 序号 | 资源名称 | 介绍 |
| 1 | ESP32-WROOM-32 主控模组 | 可使用 Arduino IDE 进行开发 |
| 2 | IPEX 一代 WIFI接口 | 用于连接IPEX1外螺内孔的天线 |
| 3 | 激光雷达接口 | 集成了雷达转接板的功能 |
| 4 | IIC 外设扩展接口 | 可用于连接 OLED 屏幕或其它 IIC 传感器 |
| 5 | 复位按键 | 按下后松开,ESP32 会重启 |
| 6 | 下载按键 | 按下时开机,ESP32 会进入到下载模式 |
| 7 | DC-DC 5V 稳压电路 | 可为上位机例如树莓派或Jetson nano等供电 |
| 8 | Type-C 接口 (LADAR) | 激光雷达数据接口 |
| 9 | Type-C 接口 (USB) | ESP32 串口通信接口、可为ESP32上传程序 |
| 10 | XH2.54 供电接口 | 输入DC7~13V,该接口直接为总线舵机和电机供电 |
| 11 | INA219 | 电压电流监测芯片 |
| 12 | 开关 | 控制外部供电的开关 |
| 13 | ST3215 总线舵机接口 | 用于连接 ST3215 总线舵机 |
| 14 | 电机接口 PH2.0 6P | B 组带编码器的电机接口 |
| 15 | 电机接口 PH2.0 6P | A 组带编码器的电机接口 |
| 16 | 电机接口 PH2.0 2P | A 组无编码器的电机接口 |
| 17 | 电机接口 PH2.0 2P | B 组无编码器的电机接口 |
| 18 | AK09918C | 3 轴电子罗盘 |
| 19 | QMI8658C | 6 轴运动传感器 |
| 20 | TB6612FNG | 电机控制芯片 |
| 21 | 总线舵机控制电路 | 连接多个ST3215总线舵机,并获取舵机反馈 |
| 22 | SD 卡槽 | 可用于存储日志或 WIFI 配置 |
| 23 | 40PIN 扩展接口 | 方便接入树莓派4B、树莓派Zero或旭日® X3 |
| 24 | 40PIN 扩展接口 | 方便使用安装再驱动板上的上位机的引脚 |
| 25 | CP2102 | 串口转 USB,用于雷达数据传输 |
| 26 | CP2102 | 串口转 USB,用于 ESP32 串口通信 |
| 27 | 自动下载电路 | 为 ESP32 上传程序时不需要按 EN 和 BOOT 按键 |
主要用途
板载丰富的外设接口,可用于驱动多种类型的机器人
- 履带机器人
- 四驱UGV
- 两驱AGV
- 平衡车
- 机械臂
- 云台
各模块使用教程
序章教程将上传UGV01产品的完整代码为例,讲解如何使用Arduino IDE上传程序,你可以将程序替换为后续教程中的例程,来将例程中的代码上传到驱动板。
- 教程一 带编码器电机控制例程
- 教程二 无编码器电机控制例程
- 教程三 ST3215总线舵机控制例程
- 教程四 PWM舵机控制例程
- 教程五 IMU数据读取例程
- 教程六 SD卡读取例程
- 教程七 INA219电压电流监测例程
- 教程八 OLED屏幕控制例程
- 教程九 激光雷达和在ROS2中发布雷达话题


{kind=link}