D500-LiDAR-Kit 教程
资料
文档
SDK
软件
三维模型
说明
产品简介
STL-19P主要由激光测距核心、无线传输单元、无线通信单元、测角测量单元、电机驱动单元和机械外壳组成。STL-19P测距核心采用DTOF技术,每秒测量5000次。当它工作时,STL-19P向前发射红外激光,激光在遇到目标物体后反射到单光子接收单元。因此,我们得到了激光发射和接收的时间,它们之间的间隙就是飞行时间。我们可以用飞行时间除以光速来计算出距离。STL-19P接收到距离数据后,将其与从角度测量单元得到的角度值相结合,组成点云数据,然后通过无线通信将点云数据传输到外部接口。同时,外部接口提供了PWM,允许电机驱动单元驱动电机。外部控制单元获得转速后,通过PID算法闭环控制达到指定的速度,确保STL-19P稳定工作。
产品特点
- 基于DTOF (飞行时间) 激光测距技术
- 支持UART通信
- 测量半径12m
- 60K Lux 抗强光干扰
- 5000Hz测量频率
- 360°扫描范围
- 激光安全符合FDA Class 1标准
- 紧凑型外观
- 10000+小时使用寿命
产品参数
| 典型测距范围 | 0.03~12m |
|---|---|
| 采样频率 | 5000 Hz |
| 扫描频率 | 10 Hz |
| 角度分辨率 | ≤0.72° |
| 机械尺寸 | 38.59*38.59*33.50mm |
| 通信接口 | UART @ 230400bps |
| 供电电压 | 5V |
| 工作电流 | 290mA |
| 功耗 | 1.45W |
| 工作温度范围 | -10℃~45℃ |
| 扫面范围 | 360° |
| 测距精度 | 10mm(300mm<测量距离<=500mm) 20mm(500mm<测量距离<=2000mm) 30mm(2000mm<测量距离<=12000) |
应用场景
- 教育科研
- 机器人避障
- 测量与检测
- 智能手势控制
- 2维手势识别
- 自主导航
- 地图重建
- 导航和定位
使用方式
【通信】
STL-19P采用ZH1.5T-4P1.5mm标准插座与外部系统连接,进行电源供应、旋转控制和数据输出。具体的接口定义和参数要求如下:
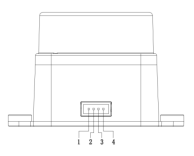
| No | 功能 | 类型 | 描述 | 最小值 | 典型值 | 最大值 |
|---|---|---|---|---|---|---|
| 1 | Tx | Output | 雷达信号输出 | 0V | 3.3V | 3.5V |
| 2 | PWM | Input | 电机控制信号 | 0V | - | 3.6V |
| 3 | GND | Power | 电源负极 | - | 0V | - |
| 4 | P5V | Power | 电源正极 | 4.5V | 5V | 5.5V |
STL-19P内部有一个无级可变电机驱动器,支持内部速度控制和外部速度控制。当PWM引脚没有连接或高阻态时,激光雷达将使用内部速度控制,默认速度为10Hz。当PWM引脚连接到一个方波信号时,激光雷达将使用外部速度控制,电机的启动、停止和速度可以由PWM信号的占空比来控制。由于每个电机驱动器的个体差异,当占空比设置为典型值时,实际速度可能会不同。如果需要准确控制电机转速,应通过接收数据中的转速信息进行闭环控制。
STL-19P的数据通信一次性采用标准异步串口(UART),传输参数如下表所示:
| 波特率 | 数据位 | 停止位 | 校验位 |
|---|---|---|---|
| 230400 | 8 Bits | 1 | No |
STL-19P采用单向通信方式。工作稳定后,开始自动发送测量数据。
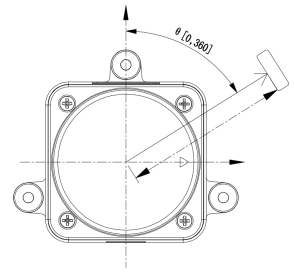
【坐标系定义】
STL-19P 采用左手坐标系,传感器前端定义为 x 轴(即零方向),旋转中心为坐标原点,旋转角度沿顺时针方向增大。请参考以下照片:
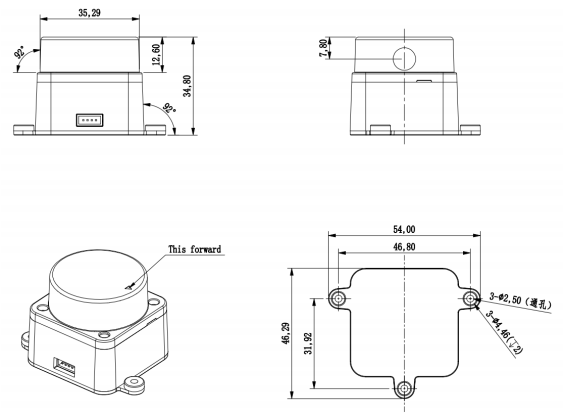
【光学窗和机械尺寸】
STL-19P 测量单元的激光发射和接收将需要一个应该在结构上避空的光学窗口。任何窗口外部的屏蔽都会在一定程度上影响 STL-19P 的测量性能。
下图显示了光学窗口的尺寸(单位:mm):
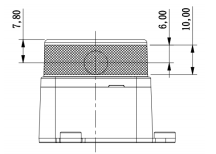
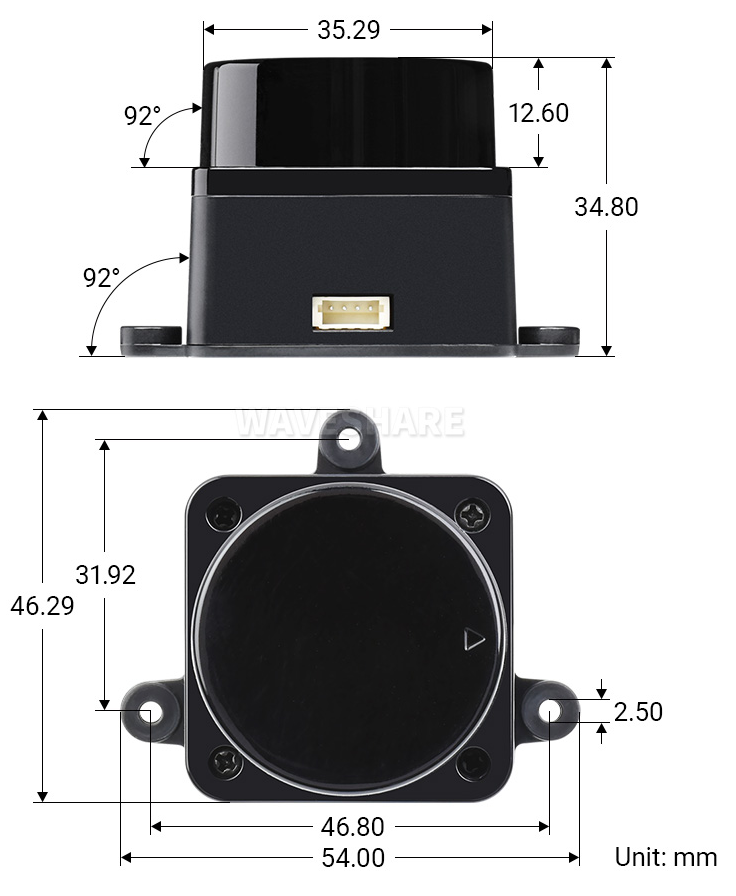
上图中的阴影部分是光学窗口。请不要覆盖它。其他安装尺寸(单位:mm)见下图:
尺寸公差:±0.2mm
软件说明
- 雷达连接转接板,转接板通过USB连接电脑。
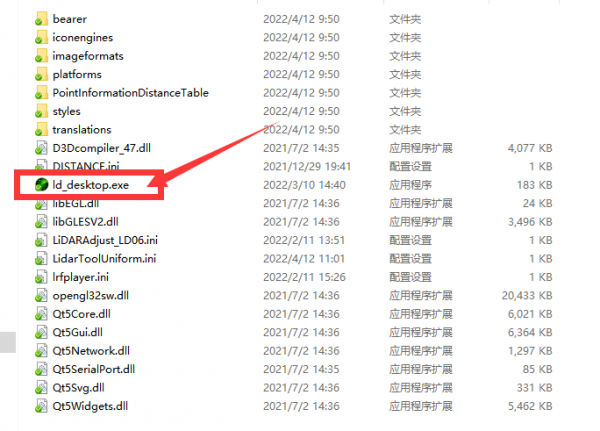
- 下载ld_desktop_V2.3.12.zip并解压。
- 运行压缩包内的ld_desktop.exe。
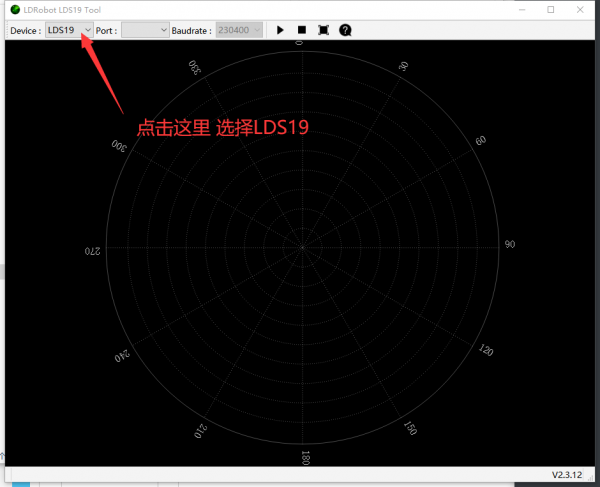
选择雷达类型LDS19。
选择COM口,如果没有雷达(转接板上的CP2102)的COM口的话需要下载CP210x_Universal_Windows_Driver.zip并安装驱动。
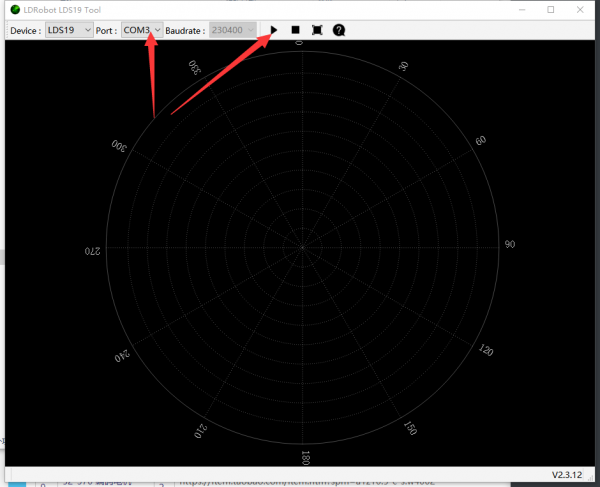
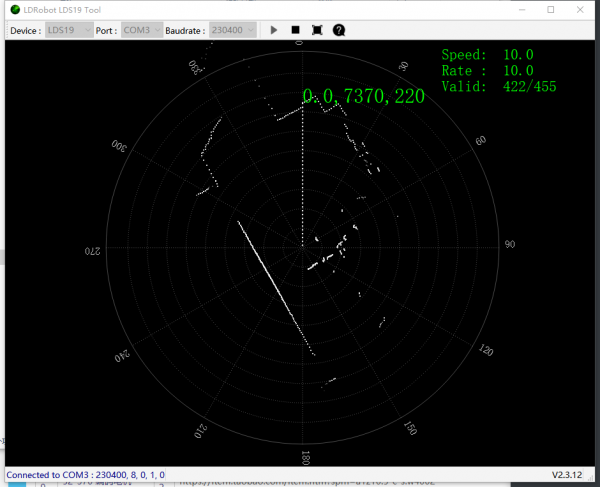
点击上面的三角形图标后,可以在电脑上看到雷达的扫描结果。
产品尺寸