

TOF飞行时间激光测距传感器使用教程
产品简介
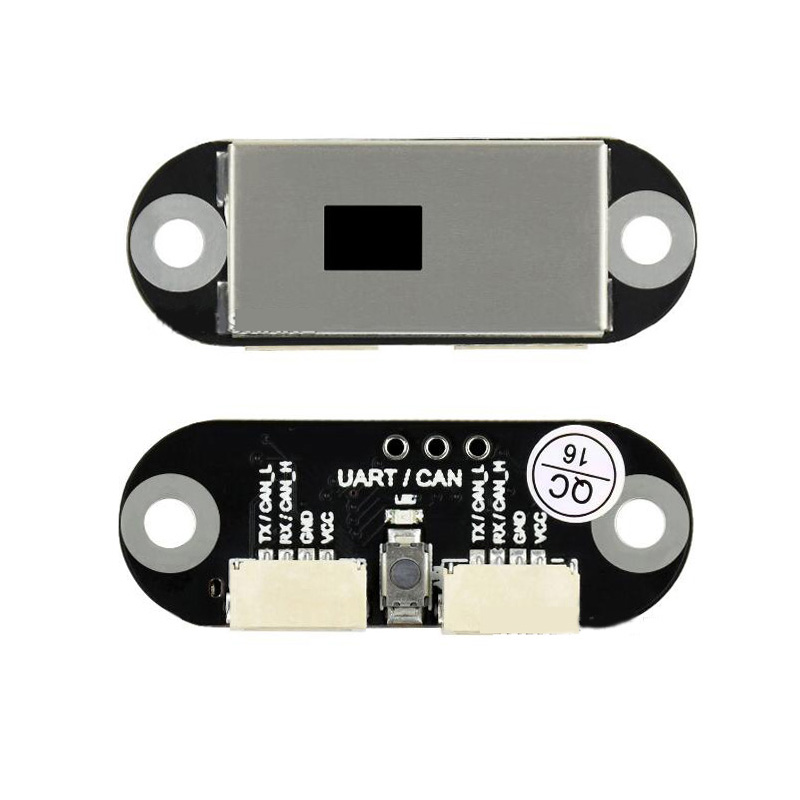
TOF Laser Range Sensor是一款基于TOF (飞行时间) 技术的激光测距传感器,内置控制器和测距算法。 测距范围可达5m,精度高达±1.5cm,分辨率可到1mm。支持UART和CAN通信,支持主动与查询输出数据,支持级联测距。 可以作为测距工具进行距离检测,也可作为机器人避障/路线规划,还可用于无人机定高/天花板检测等领域。
产品特点
- 基于TOF (飞行时间) 激光测距技术
- 支持UART、CAN通信 (UART、CAN共用接口)
- 支持短、中、长三种距离测量模式
- 支持多种FOV角度设置,可以满足多种场景需求
- 支持输出距离测量值dis、距离状态dis status、信号强度signal strength等信息
- 支持两种输出方式:主动输出与查询输出
- 支持多模块级联
- 支持升级固件
- 3.7 ~ 5.2V供电,防反接保护
- 功耗约290mW
- 940nm激光符合IEC 60825-1:2014第3版规定的Class1标准
产品参数
| 典型测距范围 (0.01~5.00m) | 短距:0.012~2.16m |
|---|---|
| 中矩:0.012~3.60m | |
| 长距:0.01~5.00m | |
| 典型测距精度 | 短距:精度±1.0cm,标准差<0.3cm |
| 中距:精度±1.0cm,标准差<1.5cm | |
| 长距:精度±1.5cm,标准差<0.5cm@0.01~3m, 标准差<8cm@3~5m | |
| 测量分辨率 | 1mm |
| 波长 | 940nm (符合Class1标准) |
| 视场角 (FOV) | 15°~27° (多档位可调) |
| 通信接口 (UART/CAN) | UART (2个接口可同时作为UART接口,TTL信号线电平3.3V) |
| CAN (2个接口可同时作为CAN接口) | |
| 通信波特率 | UART:115200~3000000bps (默认115200bps) |
| CAN:100000~3000000bps (默认100000bps) | |
| 级联数量 | UART接口支持级联多达8个,CAN接口支持级联多达7个 |
| 供电电压 | 3.7~5.2V |
| 产品功耗 | 290mW (UART主动输出,长距模式供电电压5.0V,电流58mA) |
| 产品重量 | 2.7g |
| 产品尺寸 | 35.58 × 12 × 8.05mm (长 × 宽 × 高) |
应用场景
- 无人机定高、天花板检测
- 机器人避障
- 测量与检测
- 智能手势控制
- 1维手势识别
工作原理
TOF是一种绝对距离检测技术,即传感器发出经过调试的近红外光,遇物体后反射,传感器通过计算光线发射和反射时差或相位差,来换算被拍摄景物的距离,以产生深度信息。相比于双目方案与3D结构光方案,TOF具有工作距离远,适用场景广,较远距离精度高等优点。因此常被应用于人员接近检测、机器人避障、照相机自动对焦等场合。室外环境中有来自太阳光的近红外光,会对模块的测量效果产生影响。

功能描述
【ID | 身份标识】
- ID是用于区分不同传感器而设定的一个变量,在级联连接时用于识别各个传感器。
【Interface & Baudrate | 接口与波特率】
TOFSense支持配置为UART与CAN两种通信方式:
- UART串口通信波特率设置范围如下:
| UART串口波特率 | 说明 |
|---|---|
| 115200,230400,460800,921600,1000000,1200000,2000000,3000000 | 默认波特率为115200 |
- CAN通信波特率设置范围如下:
| CAN波特率 | 说明 |
|---|---|
| 100000,250000,500000,1000000,2000000,3000000 | 默认波特率为100000 |
接口数据输出模式设置:




【Distance Status | 距离状态指示】
模块可以输出当前距离状态,用户可结合距离状态进行数据处理,距离状态含义如下:
| 数值 | 说明 |
|---|---|
| 0 | 测量距离有效 |
| 1 | 标准差大于15mm |
| 2 | 信号强度低于1Mcps |
| 4 | 相位超出界限 |
| 5 | HW或VCSEL出现故障 |
| 7 | 相位不匹配 |
| 8 | 内部算法下溢 |
| 14 | 测量距离无效 |
【Signal Strength | 信号强度】
- 指示当前返回信号的强度,该值越大表明返回信号越强。
【FOV | 视场角】
- FOV视场角的大小决定了TOFSense的视野范围,模块可以更改X方向视场角fov.x、Y方向视场角fov.y、X方向偏移fov.x_offset、Y方向偏移fov.y_offset。
X、Y方向视场角设置范围15°~27°,X、Y方向视场角偏移设置范围-6°~ 6°。可通过上位机软件进行设置。
- 模块初始视场角参数fov.x=27°、fov.y=27°、fov.x_offset=0°、fov.y_offset=0°。
通过设置X方向视场角25°、Y方向视场角15°、X方向偏移1°、Y方向偏移-1°。
可以将模块感兴趣区域变为下图所示:

说明:较小的FOV 可以提高模块狭小空间以及小物体的探测性能,但是FOV视场角的改变也会对模块的最远测距距离产生影响,视场角越小,最远测距距离越小。
【Indicator Light | 指示灯】
- 指示灯共两种闪烁状态,快速闪烁0.1S闪烁一次,慢速闪烁1S闪烁一次。LED状态与含义如下:
| 状态 | 说明 |
|---|---|
| 快速闪烁(间隔0.1S) | 模块启动阶段 |
| 快速闪烁(间隔0.1S) | 模块固件更新 |
| 慢速闪烁(间隔1S) | 模块正常工作 |
【Function Key | 功能按键】
- 用于在CAN通信模式下进行参数配置。按住按键上电直到指示灯慢速闪烁,则强制进入UART输出模式。
【CascadeRanging | 级联测距】

说明:级联测距下,适合UART查询、CAN查询、CAN主动输出三种方式。
协议解析
- 协议由 Frame Header(帧头)、Function Mark(功能字)、Data(数据)、Sum Check(校验和)组成。
- 其中 Frame Header、Function Mark 为固定不变的数值;
- Data 为传输的数据内容;
- Sum Check 为 Frame Header、Function Mark、Data 相加求和(即前面所有字节相加)后的最低字节。
- 协议组成:
- Frame Header + Function Mark + Data + Sum Check
说明:协议包遵循小端模式原则,即低字节在前,高字节在后。
- TOFSense _UART_Frame:
- 数据来源: 将模块连接上位机,配置UART为主动输出模式。
- 原始数据:
- 57 00 ff 00 9e 8f 00 00 ad 08 00 00 03 00 ff 3a
- 解析表:
- 解析表:
| Data | Type | Length (Bytes) | Hex | Result |
|---|---|---|---|---|
| Frame Header | uint8 | 1 | 57 | 0x57 |
| Function Mark | uint8 | 1 | 00 | 0x00 |
| reserved | uint8 | 1 | ff | * |
| id | uint8 | 1 | 00 | 0 |
| System_time | uint32 | 4 | 9e 8f 00 00 | 36766ms |
| dis*1000 | uint24 | 3 | ad 08 00 | 2.221m |
| dis_status | uint8 | 1 | 00 | 0 |
| signal_strength | uint16 | 2 | 03 00 | 3 |
| reserved | * | 1 | ... | * |
| Sum Check | uint8 | 1 | 3a | 0x3a |
- TOFSense _UART_Read_Frame:
- 数据来源: 将模块连接上位机,配置为UART查询输出模式,id为0,通过上位机发送下列数据实现数据查询。
- 原始数据:
- 57 10 FF FF 00 FF FF 63
- 解析表:
- 解析表:
| Data | Type | Length (Bytes) | Hex | Result |
|---|---|---|---|---|
| Frame Header | uint8 | 1 | 57 | 0x57 |
| Function Mark | uint8 | 1 | 00 | 0x00 |
| reserved | uint8 | 2 | ff | * |
| id | uint8 | 1 | 00 | 0 |
| reserved | uint8 | 2 | ff | * |
| Sum Check | uint8 | 1 | 3a | 0x3a |
- TOFSense _CAN_Frame:
- 数据来源: 模块配置为CAN主动输出模式,id为1,连接CAN接收设备。
- 原始数据:
- AD 08 00 00 03 00 FF FF
- 解析表:
- 解析表:
| Field name | Part | Level | Type | Length(bits) | Hex | Result |
|---|---|---|---|---|---|---|
| Start Of Frame | SOF | * | 1 | * | * | |
| Arbitration Field | ID | * | 11 | 0x200+id | 0x201 | |
| Arbitration Field | RTR | * | 1 | * | * | |
| Control Field | IDE | * | 1 | * | * | |
| Control Field | r0 | * | 1 | * | * | |
| Control Field | DLC | * | 4 | * | * | |
| Data Field | dis*1000 | uint24 | 24 | ad 08 00 | 2.221m | |
| Data Field | dis_status | uint8 | 8 | 00 | 0 | |
| Data Field | signal_strength | uint16 | 16 | 03 00 | 3 | |
| Data Field | reserved | * | 16 | * | * | |
| CRC Field | CRC | * | 15 | * | * | |
| CRC Field | CRC_delimiter | * | 1 | * | * | |
| ACK Field | ACK Slot | * | 1 | * | * | |
| ACK Field | ACK_delimiter | * | 1 | * | * | |
| End Of Frame | EOF | * | 7 | * | * |
- TOFSense _CAN_Read_Frame:
- 数据来源: 模块配置为CAN查询输出模式,id为1,连接CAN查询设备,配置id_s为2。
- 原始数据:
- FF FF FF 01 FF FF FF FF
- 解析表:
- 解析表:
| Field name | Part | Level | Type | Length(bits) | Hex | Result |
|---|---|---|---|---|---|---|
| Start Of Frame | SOF | * | 1 | * | * | |
| Arbitration Field | ID | * | 11 | 0x400+id_s | 0x402 | |
| Arbitration Field | RTR | * | 1 | * | * | |
| Control Field | IDE | * | 1 | * | * | |
| Control Field | r0 | * | 1 | * | * | |
| Control Field | DLC | * | 4 | * | * | |
| Data Field | reserved | uint24 | * | * | * | |
| Data Field | id | uint8 | 8 | 01 | id = 1 | |
| Data Field | reserved | uint16 | * | * | * | |
| CRC Field | CRC | * | 15 | * | * | |
| CRC Field | CRC_delimiter | * | 1 | * | * | |
| ACK Field | ACK Slot | * | 1 | * | * | |
| ACK Field | ACK_delimiter | * | 1 | * | * | |
| End Of Frame | EOF | * | 7 | * | * |
软件说明
TOF Assistant是TOF激光测距模块配套的调试软件,主要作用为:配置调试、状态显示、功能应用、固件升级:
- 配置调试:用于配置节点相关参数,如ID、工作模式、波特率等。
- 功能应用:用于应用开发,如数据导入导出、运动轨迹存储、历史轨迹回放等。
- 固件升级:用于给产品进行有线固件升级。



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}