

-details-pack.jpg)





【产品详情】
[] 总线舵机驱动板 专为总线舵机设计的驱动板,集成 ESP32 和控制电路
[] 可通过 ESP32 串口或 USB 接口控制多达 253 个舵机
[] 可以用作机器人项目的主控板
【产品特性】
[] 可同时控制多达 253 个 ST 和 RSBL 系列总线舵机
[] 宽电压输入 9~25V(输入电压需与舵机电压匹配)
[] 基于 ESP32-WROOM-32 模组,支持多种有线和无线通信方式
[] 提供多种控制例程,方便多种硬件控制
[] 可通过 Type-C 接口与总线舵机直接通信
[] 支持安装树莓派,集成 5V 降压稳压电路可为树莓派供电,通过 GPIO 串口进行通信,降低接线复杂度
【产品参数】
| 主控模组 | ESP32-WROOM-32 |
|---|---|
| 供电接口 | XT60、5.5×2.5 mm DC |
| 供电电压 | 9~25V(输入电压需与舵机电压匹配) |
| 通信接口 | UART、Type-C × 2 |
| 无线通信 | 2.4G WiFi |
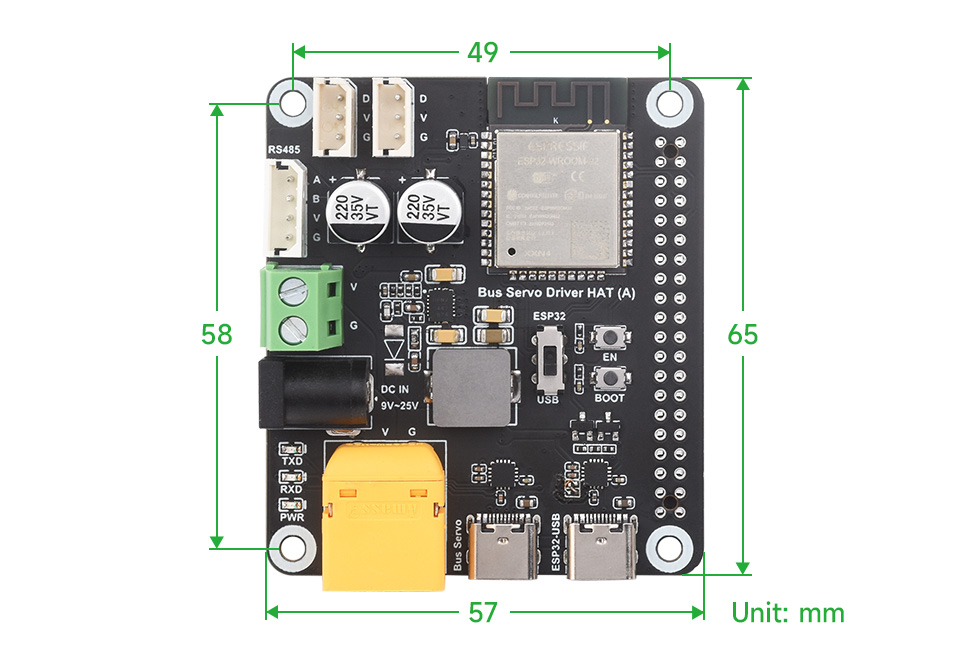
| 定位孔直径 | 3 mm |
| 定位孔间距 | 58×49 mm |
| PCB 尺寸 | 65×57 mm |
【主要用途示意】
[] 可反馈舵机多种信息:位置、速度、扭矩锁、运行模式 (舵机模式,电机模式等) 可用于需要闭环自动控制的高级项目
[] 上位机可以通过 JSON 指令来控制总线舵机并获取 JSON 格式的反馈信息,降低了使用难度,助力用户二次开发
[] 可用于搭建四足、六足、机械臂等需要多个舵机的机器人项目


图片仅供展示,具体配置请参考配置清单
【支持控制多种伺服舵机】
[] 支持控制 ST/RSBL 系列总线舵机
[] 需根据不同总线舵机供电要求为驱动板供电
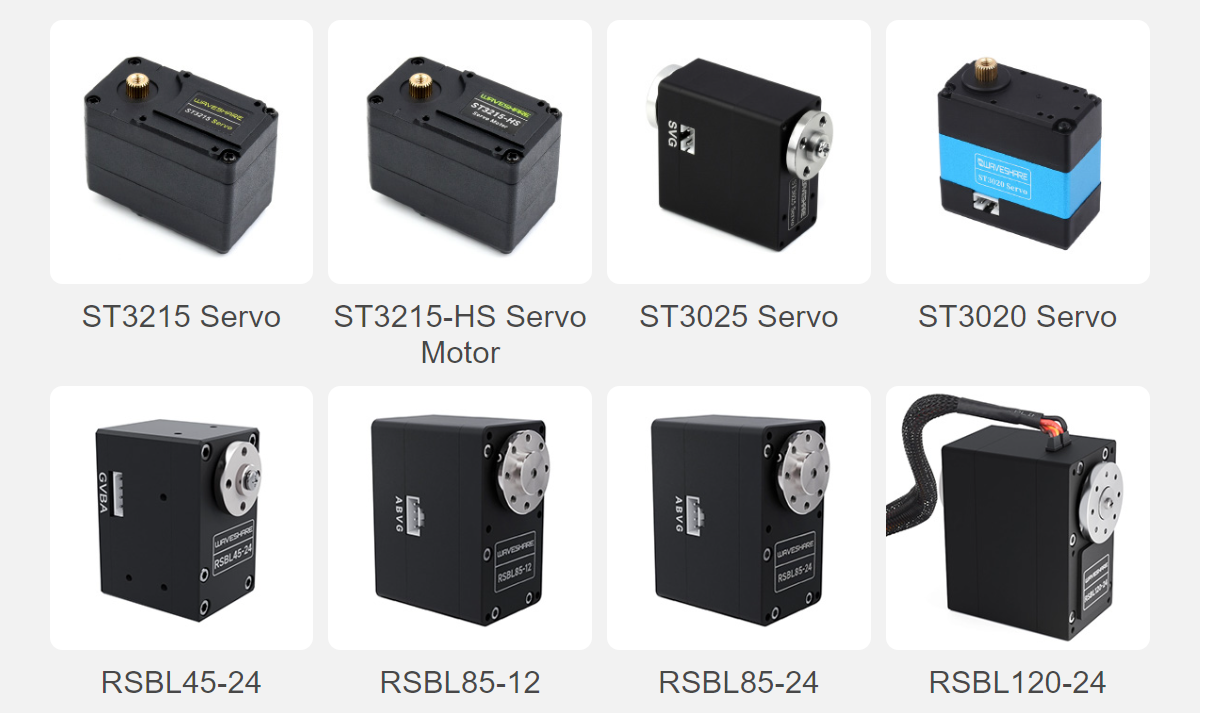
注:不同舵机混用时需要注意电压是否同时符合所有舵机的要求
【串行总线连接】
[] 可同时串联多达 253 个舵机,布线简单,占用端口少

注意事项:
一路 UART 可以控制 253 个总线舵机,但是由于舵机功率较大,当使用过多舵机时需要考虑供电方案能否满足要求。
本产品不含图中的舵机,如有需要,请另行购买。
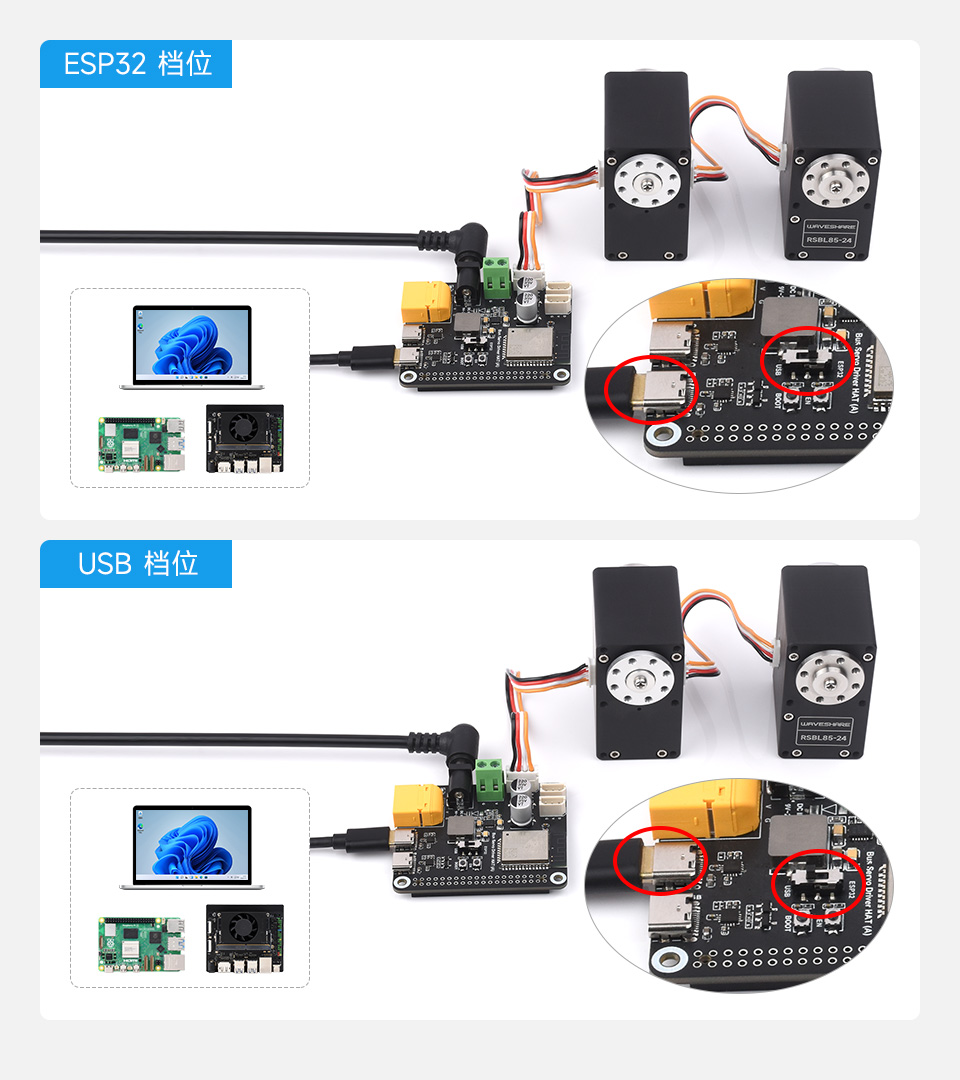
【有线控制方式】
[] 可通过向 ESP32 发送 JSON 格式的指令来控制总线舵机,也可以直接向总线舵机直接发送其专有控制指令,我们提供相关的 Python 例程
【无线控制方式】
[] 通过 Web 应用控制,驱动板上电后会自动建立热点供用户连接,支持跨平台使用,可以使用手机、平板、PC 来使用 Web 应用

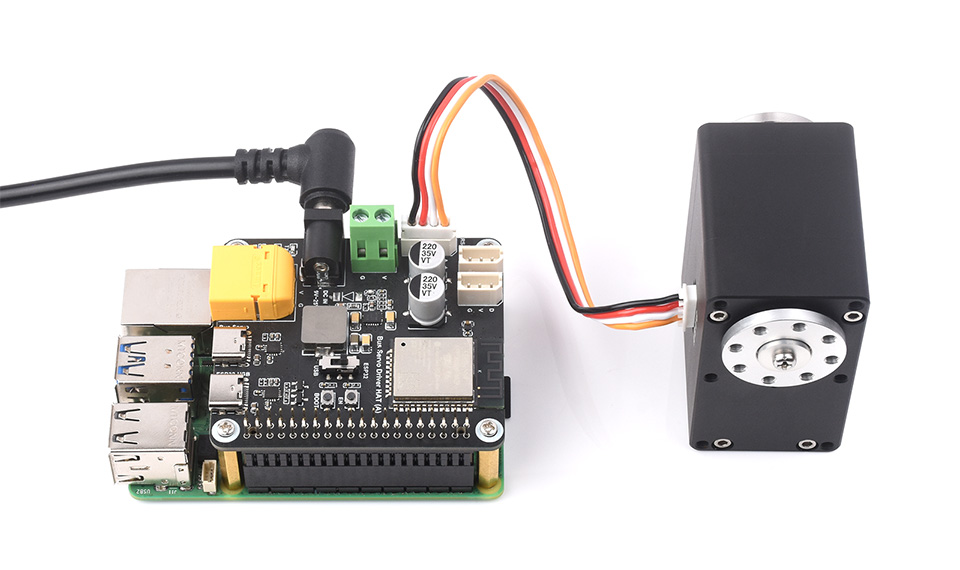
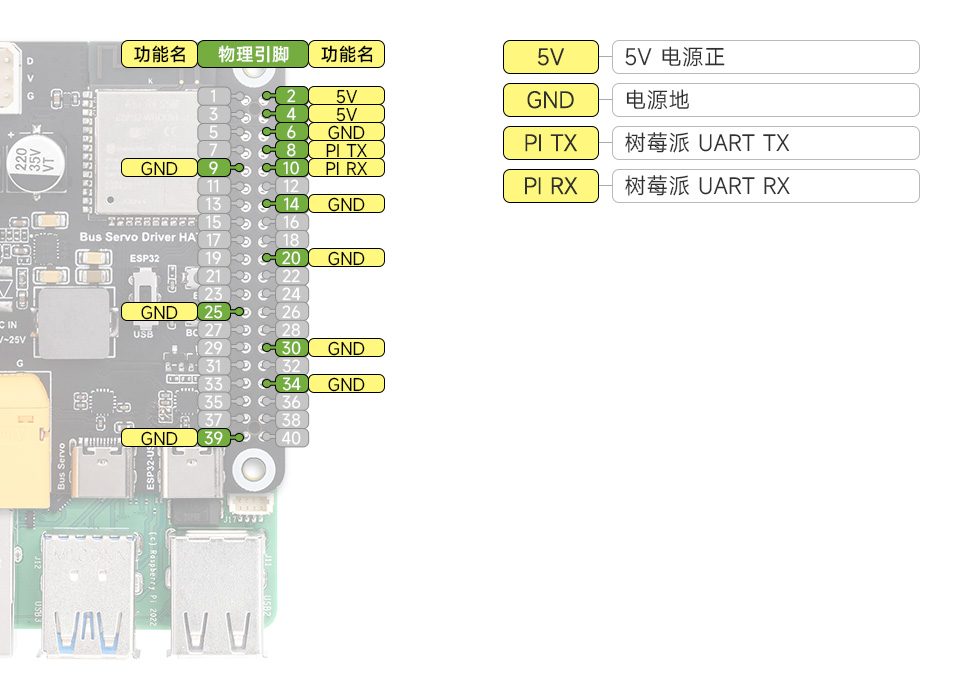
【支持安装树莓派】
[] 适用于树莓派 5/4B 等主板,可为树莓派进行供电,通过树莓派的 GPIO 串口进行通信,降低接线复杂度
【ESP32 主控,资料丰富 方便二次开发】
[] 内置 WIFI 和蓝牙,同时支持 ESP-NOW,可以远程遥控和调试舵机
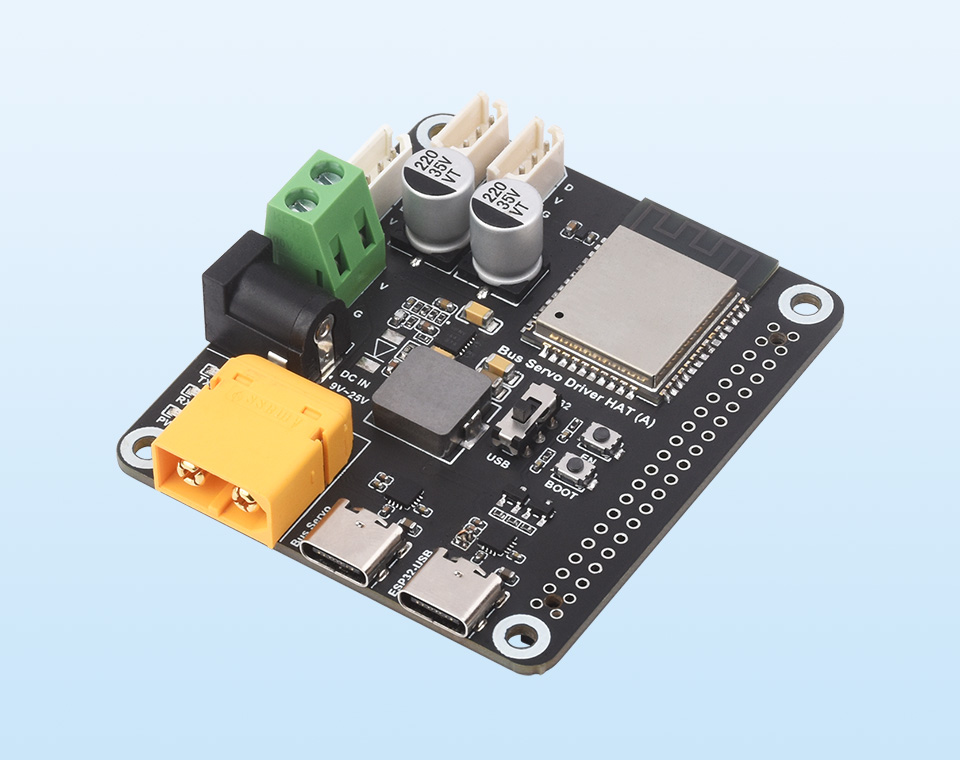
【资源简介】
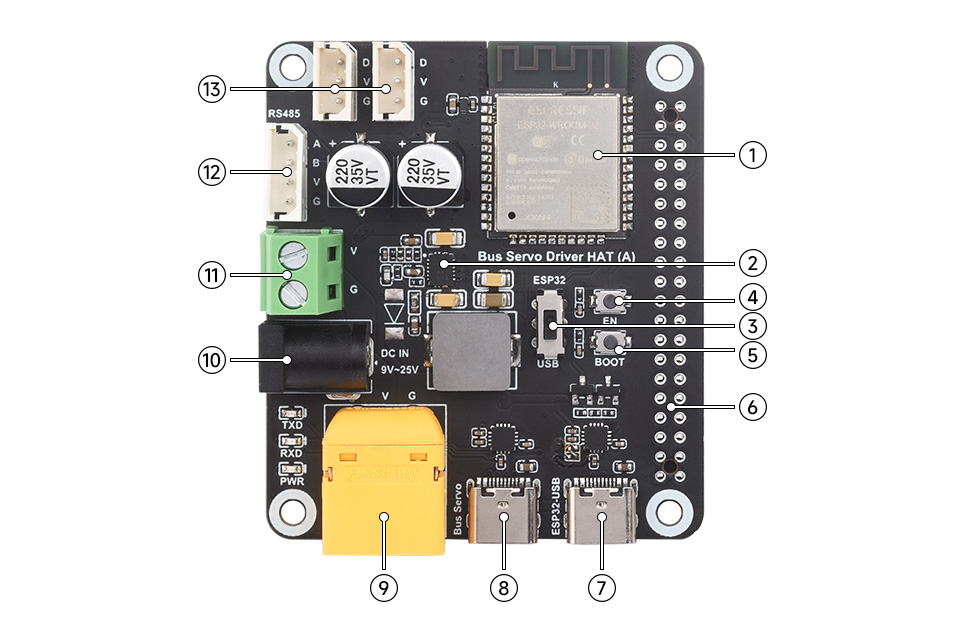
| 1. ESP32 主控 | 8. 总线舵机 Type-C 接口 |
| 2. DCDC 5V 降压稳压 | 9. XT60 供电接口 |
| 3. 串口控制切换开关 | 10. 5.5×2.5 DC 供电接口 |
| 4. 复位按键 | 11. 电源接线端子 |
| 5. BOOT 手动下载模式按键 | 12. RS485 总线舵机接口 |
| 6. Raspberry Pi 40PIN 接口 | 13. TTL 总线舵机接口 |
| 7. ESP 主控 Type-C 接口 |
【产品尺寸】
-details-pack-web.jpg)




