

树莓派UGV Rover ROS2 四驱六轮 开源AI云台机器人小车OpenCV
¥3280
制造商:斑梨电子
SKU:0210031
发布时间:2024-09-27 10:02
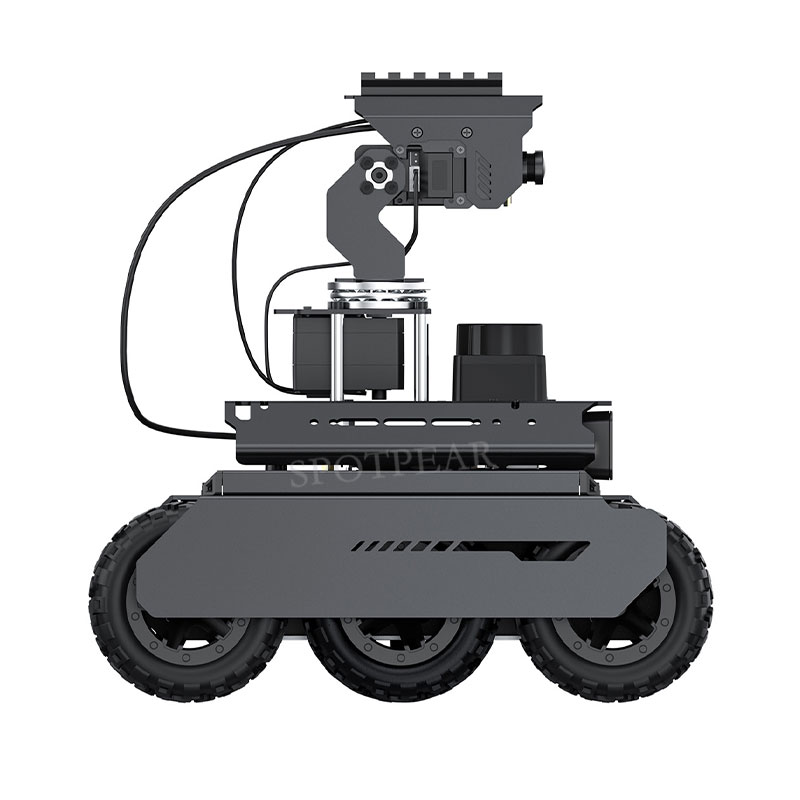
UGV Rover
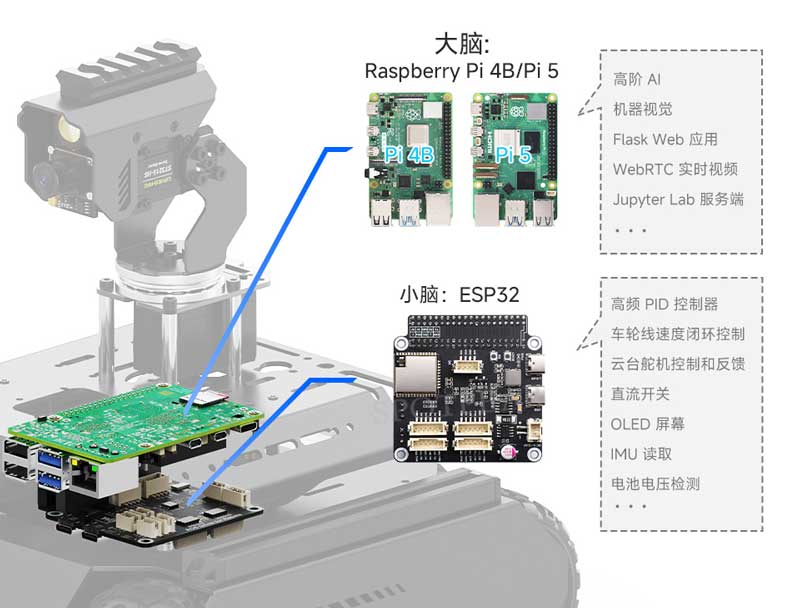
六轮四驱越野 AI 机器人,基于 ROS2 开源机器人系统
伴您激发无限的创新力
¥3280
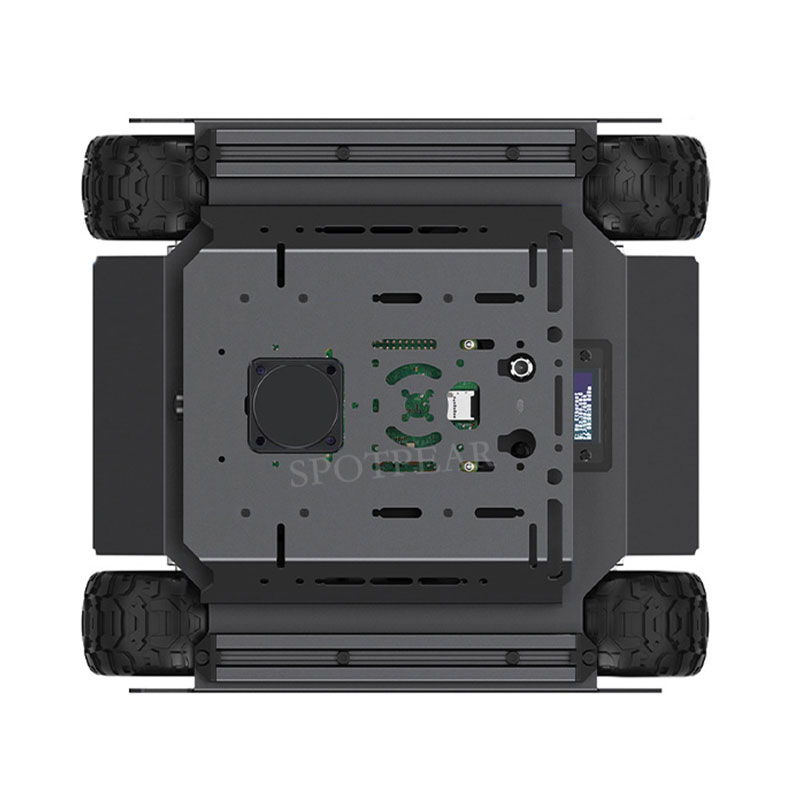
UGV Rover
六轮四驱越野 AI 机器人,基于 ROS2 开源机器人系统
伴您激发无限的创新力