

DDSM210 使用教程
说明
前言
DDSM210 直驱伺服电机是基于一体化开发理念,集外转子无刷电机、编码器、伺服驱动于一体的高可靠性永磁同步电动机,其结构紧凑,安装方便,运行稳定,小体积、大扭矩特别适合应用于以下直驱领域:机器人关节、小型 AGV 驱动轮、平衡车驱动轮、开发车载平台等高级机器人项目。
通过对极槽数、槽型、气隙、永磁材料等相关优化,确保电机有更大的转矩输出、更小的转矩波动,实现低转速大扭矩的直接驱动,为用户提供了高性能的直驱应用解决方案。
该电机适配的驱动器使用磁场定向控制 (FOC) 算法,配合电机内置的高精度传感器,达到对电机的精确控制及更好的静音效果。驱动器具备完整可靠的电机 OBD(On-board diagnostics) 监控机制和保护功能,确保电机运行安全可靠。
同时我们为该型号直驱伺服电机提供了开源的四驱越野车的结构模型,你可以在最下面的“资料”-“开源结构”中下载该开源结构的模型和工程文件。
产品使用注意事项
1. 请使用前确认工作电压是否为本文规定电压范围。
2. 确保电机在规定环境温度范围(-5℃~40℃)内使用,电机过温保护阈值为80℃,温度低于阈值5℃后解除保护。
3. 请避免电机浸泡在水中,否则可能会导致电机运行异常或损坏。
4. 使用前请确保接线正确,稳固,避免接触不良的情况出现。
5. 使用电机前请参考安装说明,保证电机安装正确,稳固。
6. 使用电机前请参考安装说明,保证电机对外输出部分安装正确,稳固。
7. 使用时请避免损伤线材,否则可能会导致电机运行异常或损坏。
8. 使用时请勿触摸电机转动部分,避免受伤。
9. 电机大转矩输出时,会出现发热的情况,请勿触摸电机,避免烫伤。
10. 请勿私自拆卸电机,否则可能会导致电机运行异常或损坏,并可能带来安全隐患。
产品特性
- 超低噪音
- 高精度无背隙
- 响应快,直接驱动无延迟
- 电机和驱动器一体化设计,结构紧凑,集成度高
- 支持 UART 通信方式
- 通过通信可以获取电机的位置,速度,电流,故障码等信息
- 有霍尔位置检测,过流保护等功能
- 支持电刹车
- 无传动机械摩擦,传动效率接近 99.99%
产品参数
- 空载转速:210±10rpm
- 空载电流:0.15A
- 额定转速:98rpm
- 额定转矩:0.25Nm
- 额定电流:0.5A
- 堵转扭矩:0.85Nm
- 堵转电流:≤4.5A
- 输入电压:11~22V DC
- 使用环境温度:-5℃~40℃
- 整机重量:216g
- 编码器分辨率:4096
- 相对精度:1024
- 噪音等级:≤45dB(A)
- 单轮承重负载:3Kg
注:以上参数是在额定电压14.4VDC下测得。
电机接口及线序说明
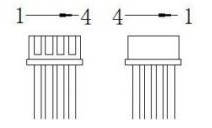
| 信号线(ZH1.5*4P) | 名称 | 类型 | 说明 |
|---|---|---|---|
| 1 | UART | Tx | UART_Tx |
| 2 | UART | Rx | UART_Rx |
| 3 | GND | 电源负极 | - |
| 4 | VCC | 电源正极 | - |
简单使用方法
- 简单控制方法只是用来验证电机的工作原理以及做一些简单的测试,具体的使用方法可以参考后面的通信协议章节。
- 你可以使用我们的工业级USB转TTL转换器来使用带有USB接口的设备控制直驱伺服电机。
- 信号线接线,引脚定义参考上面的电机接口及线序说明的信号线表格,将电机的TX与转换器的RX相连,将电机的RX与转换器的TX相连,电机信号线的GND与转换器的GND相连。
- 供电线接线,引脚定义参考上面的电机接口及线序说明,信号线的VCC连接12V DC电源(11~22V DC)正极,信号线的GND连接12V DC电源的负极。
- 下载OSDA开源串口调试助手:
x86国内Gitee下载链接
x86国外Github下载链接
x64国内Gitee下载链接
x64国外Github下载链接
- 运行OSDA开源串口调试助手,选择设备串口,波特率选择115200,勾选Hex接收,勾选Hex发送,打开串口后即可向电机发送指令。
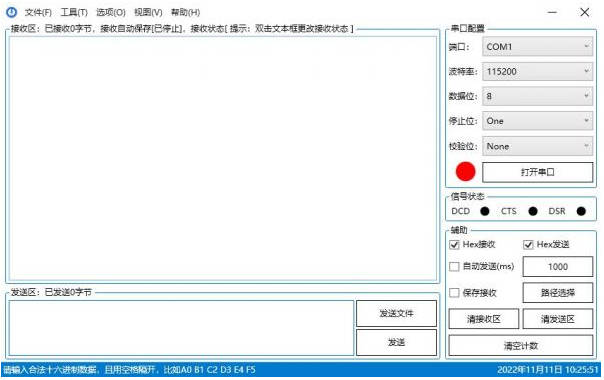
- 注意某些指令发送后电机会开始转动,不要碰到电机的转动部位,如果你没有合适的结构件来安装电机,请务必做好随时断电的准备,也千万不要给高转速的命令。
- 以下是 UART 通信指令集
1. 切换速度环(02),该指令无反馈
01 A0 02 00 00 00 00 00 00 E4
2. 获取其他反馈,可查询电机模式
01 75 00 00 00 00 00 00 00 47
3. 刹车指令,速度环模式下有效
01 64 00 00 00 00 00 FF 00 D1
4. ID 设置(01),连续发五次该指令
AA 55 53 01 00 00 00 00 00 00
5. ID 查询
C8 64 00 00 00 00 00 00 00 DE
6. 速度环指令(-210~210 rpm)
01 64 FF CE 00 00 00 00 00 DA (-5rpm)
01 64 FF 9C 00 00 00 00 00 9A (-10rpm)
01 64 00 00 00 00 00 00 00 50 (0rpm)
01 64 00 32 00 00 00 00 00 D3 (5rpm)
01 64 00 64 00 00 00 00 00 4F (10rpm)
7. 位置环指令(0~32767 对应 0~360°)
01 64 00 00 00 00 00 00 00 50 (0)
01 64 27 10 00 00 00 00 00 57 (10000)
01 64 4E 20 00 00 00 00 00 5E (20000)
01 64 75 30 00 00 00 00 00 A7 (30000)
通讯协议
- 波特率:115200
- 数据位:8bit
- 停止位:1bit
- 奇偶校验位:无
- 数据长度:10 字节
- 回复形式:一问一答
- 速率:最高 500Hz
- 速度环模式下:-2100~2100 对应 -210rpm~210rpm,单位 0.1rpm,数据类型有符号 16 位
- 位置环模式下:0~32767 对应 0°~360°,数据类型无符号 16 位
- 操作步骤:
①设置电机 ID(断电保存)
②设置电机模式(开环、速度环、位置环,默认为速度环)
③发送给定值
- CRC8值:
对数值DATA[0]~DATA[8]进行CRC8校验后的值。
CRC算法:CRC-8/MAXIM
多项式:x8 + x5 + x4 +1
验证产品阶段可以通过这个网站来计算校验位:https://crccalc.com/
协议1:驱动电机转动
发送到电机:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0x64 | 速度/位置给定高8位 | 速度/位置给低高8位 | 0 | 0 | 加速时间 | 刹车 | 0 | CRC8 |
电机反馈:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0x64 | 速度高8位 | 速度低8位 | 电流高8位 | 电流低8位 | 加速时间 | 温度 | 故障码 | CRC8 |
- 加速时间:速度环模式下有效,每1rpm的加速时间,单位为1ms,当设置为1时,每1rpm的加速时间为1ms,当设置为10时,每1rpm的加速时间为 10*1ms=10ms,设置为0时,既默认为1,每1rpm的加速时间为1ms。
- 刹车:0XFF 其他值不刹车,速度环模式下有效。
协议2:获取其它反馈
发送到电机:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0x74 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | CRC8 |
电机反馈:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0x74 | 里程圈数高8位 | 里程圈数次高8位 | 里程圈数次低8位 | 里程圈数低8位 | 位置高8位 | 位置低8位 | 故障码 | CRC8 |
- 里程圈数:计圈范围 -2147483467 到 2147483467,重新上电会清 0
- 位置值:0~32767 对应 0~360°
- 故障码:
| 故障值 | BIT7 | BIT6 | BIT5 | BIT4 | BIT3 | BIT2 | BIT1 | BIT0 |
|---|---|---|---|---|---|---|---|---|
| 内容 | 保留 | 保留 | 保留 | 过温故障 | 保留 | 保留 | 过流故障 | 保留 |
例如故障码为:0x02 即为 0b00000010,表示发生过流故障。
协议3:电机模式切换发送协议
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0xA0 | 模式值 | 0 | 0 | 0 | 0 | 0 | 0 | CRC8 |
电机反馈:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0xA0 | 模式值 | 0 | 0 | 0 | 0 | 0 | 0 | CRC8 |
模式值:
0x00:设定为开环
0x02:设定为速度环
0x03:设定为位置环
协议4:电机ID设置发送协议
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | 0xAA | 0x55 | 0x53 | ID | 0 | 0 | 0 | 0 | 0 | CRC8 |
电机反馈:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0x64 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | CRC8 |
注:设置ID时请保证总线上只有一个电机,每次上电只允许设置一次,电机接收到5次ID设置指令后进行设置。
协议5:获取模式反馈
发送到电机:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0x75 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | CRC8 |
电机反馈:
| 数据域 | DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | DATA[8] | DATA[9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 内容 | ID | 0x75 | 模式值 | 0 | 0 | 0 | 0 | 0 | 0 | CRC8 |
模式值:
- 0x00:开环
- 0x02:速度环
- 0x03:位置环
保护规定
1、母线过流保护阈值:2.8 A,过流持续时间超过 5S 触发停机保护,5S 后解除
2、电机过温保护阈值:80℃,温度低于阈值 5℃后解除保护
3、堵转保护:堵转持续时间超过 5S 触发保护,5S 后解除
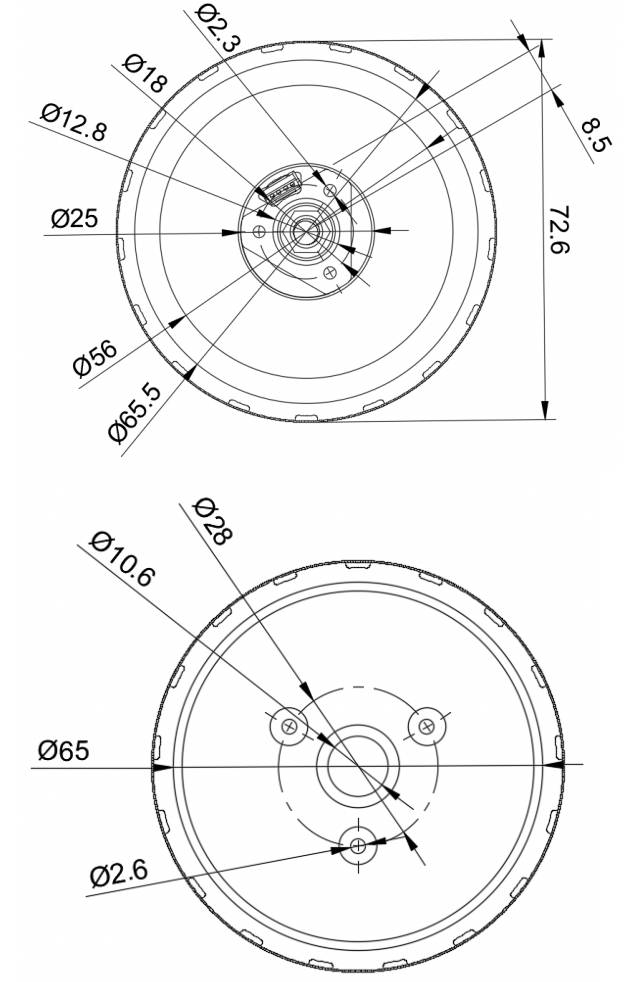
安装指引
- 请参考电机安装孔尺寸和位置,将电机安装到对应设备。单位:mm
- 电机输出端的螺纹孔为 M3,深度 3mm,安装孔圆心在直径为 28mm 的位置均匀分布。
- 电机安装端的安装孔为 M2.5,深 6mm,安装孔圆心在直径为 18mm 的位置均匀分布,安装过程中请选择合适的螺丝进行安装。
资料
3D模型
2D图纸
开源结构
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841

