

- 首页
- >
- 文章中心
- >
- Jetson系列
- >
- Jetson主板及套餐
JETSON-ORIN-IO-BASE教程
NVIDIA官方资料
简介
模组
NVIDIA® Jetson Orin™ NX 模组算力高达 100 TOPS,性能是上一代产品的 5 倍,适用于多个并发 AI 推理管道,此外它还可以通过高速接口连接多个传感器,因此可为新时代机器人提供理想的解决方案。Jetson Orin NX 模组极其小巧,但可提供高达 100 TOPS 的 AI 性能,功率可在 10 瓦到 25 瓦之间进行配置。此模组的性能可高达 Jetson AGX Xavier 的 3 倍、Jetson Xavier NX 的 5 倍。 目前有两个内存版本可供 用户选择,分别为8GB和16GB,两者参数稍有不同,选择前请先留意参数。
基础套件
Jetson Orin NX 8GB/16GB DEV KIT基于 Jetson Orin NX 核心板设计,搭配 JETSON-IO-BASE-B 底板,提供 M.2、HDMI、USB 等更多丰富的接口,方便用户更好的发挥产品的性能。 按照核心板版本设置两个套件,无内置存储模块,可提供高达 70/100 TOPS 的 AI 性能。搭配 128 GB NVMe 固态硬盘,高速读写,满足大型 AI 开发项目的需要。
A套餐
套餐 A 是由基础套件搭配 800 万像素 (3280×2464) 高清摄像头组成,适用于人脸识别、道路标识线识别和车牌识别等人工智能应用。
B套餐
套餐 B 是在套餐 A 的基础上,增加了 13.3 英寸电容触控屏 (带外壳),1920×1080 分辨率,支持 10 点触控,内置高保真喇叭,搭配摄像头使用可以实时显示拍下来的图像,实现更多人机交互的人工智能操作。
JETSON-IO-BASE-B底板使用说明
- 烧录系统需要用到Ubuntu 18.04主机或虚拟机
器材准备
- Jetson Orin NX主板和JETSON-IO-BASE-B底板。
- Ubuntu18.04 虚拟机(或电脑主机)。
- 电源适配器。
- 跳线帽(或杜邦线)。
- USB 数据线(Micro USB接口,可传输数据)。
硬件配置(进入recovery 模式)

- 用跳帽或者杜邦线短接FC REC和GND引脚,位置如上图,位于核心板底下
- 连接DC电源到圆形供电口, 稍等片刻
- 用USB线(注意要是数据线)连接Jetson主板的Micro USB接口到Ubuntu主机
安装系统
- unbuntu虚拟机或者主机打开终端,新建文件夹
sudo mkdir sources_orin cd sources_orin
- 下载路径
https://developer.nvidia.com/downloads/jetson-linux-r3521-aarch64tbz2 https://developer.nvidia.com/downloads/linux-sample-root-filesystem-r3521aarch64tbz2
将资源包移到文件夹,并解压(实际操作的时候,请尽量用tab按键自动补齐指令)
sudo mv ~/Downloads/jetson-linux-r3521-aarch64tbz2 ~/sources_orin/ sudo mv ~/Downloads/linux-sample-root-filesystem-r3521aarch64tbz2 ~/sources_orin/
- 解压资源
sudo tar -xjf Jetson_Linux_R35.2.1_aarch64.tbz2 cd Linux_for_Tegra/rootfs/ sudo tar -xjf ../../Tegra_Linux_Sample-Root-Filesystem_R35.2.1_aarch64.tbz2 cd ../ sudo ./apply_binaries.sh (若出现报错按提示操作,再重新输入该指令)
- 烧录系统,如有报错请按照提示操作,再运行下面的指令
Jetson Orin NX + Xavier NX Devkit (NVMe):sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \ -c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" \ --showlogs --network usb0 p3509-a02+p3767-0000 internal
JETSON-ORIN-IO-BASE底板使用说明
- 烧录系统需要用到Ubuntu 18.04或22.04的主机或虚拟机
器材准备
- Jetson Orin NX主板和JETSON-ORIN-IO-BASE底板。
- Ubuntu18.04或ubuntu 20.04 虚拟机(或电脑主机)。
- 电源适配器。
- 跳线帽(或杜邦线)。
- USB 数据线(type C接口,可传输数据)。
硬件配置(进入recovery 模式)
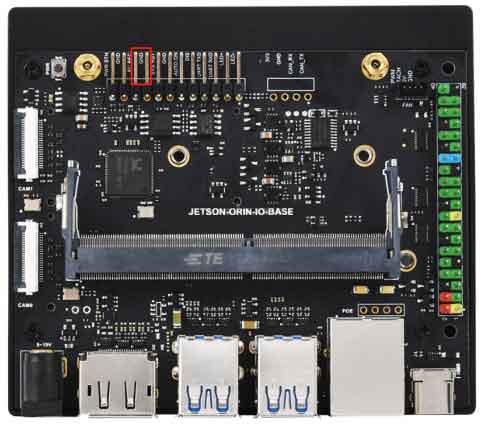
- 用跳帽或者杜邦线短接FC REC和GND引脚,位置可参考上图,位于核心板底下
- 连接DC电源到圆形供电口, 稍等片刻
- 用USB线(注意要是数据线)连接Jetson主板的type C接口到Ubuntu主机
软件配置
- 打开ubuntu系统,打开浏览器下载SDK Manager
- 下载完成后,我们进入下载路径Downloads进行安装,终端输入:
sudo dpkg -i sdkmanager_1.6.1-8175_amd64.deb(根据自己的版本输入)
- 安装完成后,系统可能会报错找不到依赖文件,输入以下命令解决此问题。
sudo apt --fix-broken install
- 打开Ubuntu电脑终端,运行SDK Manager打开软件。
- 点击LOGIN,登录NVIDIA账号,会在浏览器弹出链接,输入前面注册邮箱和密码登录进去。

- 此时我们就成功登录SDK Manager

安装系统
- 打开ubuntu电脑终端,运行sdkmanager打开软件
- 登录账号
- 如果Jetson 主板有被正常识别到如下图,如果已连接没显示,请点击refresh
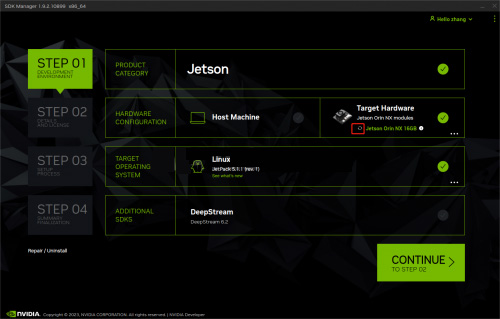
- 开发板类型选择Jetson Orin NX 选项,16GB版本和8GB版本根据实际情况选择(如果你使用的是官方套件, 选择developer Kit)
- 在JetPack选项中,选择支持的最新系统即可,不勾选其他的SDK, 然后点击Continue
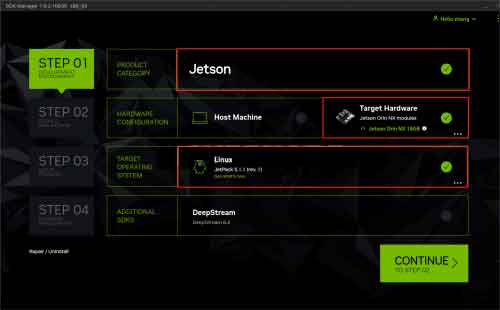
- 选择Jetson OS, 并将Jetson SDK Components的选项去掉。勾选最下方的第一个协议

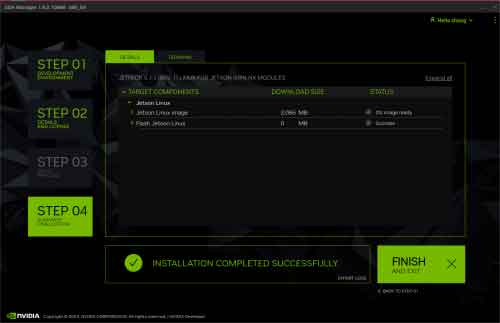
- 最后点击Continue 等待烧录完成即可。
- 这里会默认选择开发板类型。 注意前面选择开发板类型的时候不要选择错误。
- 这里选择Manual Setup-Jetson ... (不同主板后缀提示不同)
- 这里选择NVME
- 这里可以选择runtime或者preconfig, 选择runtime的话,后续需要自己手动配置系统(用户名,密码,语言等), 选择preconfig,可以填入用户名和密码(可以自己定义),会在启动过程中自动配置主板
- 烧录完成之后如下图,去掉底板的跳帽,接入显示器,重新上电,按照提示进行开机配置(如果是设置的pre-config, 上电后直接进入系统)。
SDK安装
Jetpack主要包括系统镜像,库,APIs,开发者工具,示例和一些文档。
SDK里包含TensorRT、cuDNN、CUDA、Multimedia API、Computer Vision、Developer Tools。
- TensorRT :用于图像分类、分割和对象检测神经网络的高性能深度学习推理运行,它加快了深度学习推理的速度,并减少了卷积和反卷积神经网络的运行时内存占用。
- cuDNN :CUDA深度神经网络库为深度学习框架提供高性能原语,它包括对卷积、激活函数和张量变换的支持。
- CUDA :CUDA工具包为构建 GPU 加速应用程序的 C 和C++开发人员提供了一个全面的开发环境。该工具包包括用于 NVIDIA GPU 的编译器、数学库以及用于调试和优化应用程序性能的工具。
- ultimedia API : Jetson Multimedia API为灵活的应用程序开发提供了低级 API。
- Computer Vision :VPI(视觉编程接口)是一个软件库,提供在PVA1(可编程视觉加速器)、GPU和CPU上实现的计算机视觉/图像处理算法,其中OpenCV是用于计算机视觉、图像处理和机器学习的领先开源库,现在具有用于实时操作的 GPU 加速功能,其中VisionWorks2是一个用于计算机视觉(CV)和图像处理的软件开发包。
- Developer Tools :Developer Tools CUDA工具包为构建GPU加速应用程序的C和C++开发人员提供了一个全面的开发环境。该工具包包括用于NVIDIA GPU的编译器、数学库以及用于调试和优化应用程序性能的工具。
以上是SDK的部分功能。
使用指令安装SDK
sudo apt update sudo apt install nvidia-jetpack
FAN
安装jtop
sudo apt install python3-pip sudo pip3 install jetson-stats sudo reboot
开机后输入
jtop
最大化窗口鼠标选择6CTRL,鼠标选择profiles里的mannual选项,然后点击speed旁的[+]号调节风扇风力.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}