

高精度360°磁编码伺服电机120KG.CM 使用教程
说明
前言
RSBL120-24 是一款堵转扭矩为 120KG.CM 的可编程 RS485 串行伺服电机,采用全铝合金外壳、无刷电机、钢齿牙箱,360° 高精度磁编码器,外接不锈钢主多舵盘。可以通过程序控制,将任意角度设置为伺服电机中位,能实现 360° 任意角度可控,多圈连续转动等工作模式,内置加速度启停功能,使动作更加柔和。每个伺服电机上面有两个接口,可以将伺服电机串联起来使用,理论上可以同时控制253个伺服电机并且每个伺服电机都能够获取自己当前的角度、负载、电压、模式等信息。适用于机械手臂,六足机器人,人形机器人,轮式机器人等需要闭环控制的机器人项目,轻松搞定大块头。
同时我们为该型号伺服电机提供了详情页所展示的机械臂模型,你可以在最下面的资料-开源结构中下载该开源结构的模型和工程文件。
产品规格
- 工作电压:9~24V(典型值 24V)
- 机构极限角度:无限制
- 转动角度:360°(舵机模式角度控制)/电机模式可连续转动
- 通信波特率:38400bps~1Mbps(默认 1Mbps)
- 齿轮形式:高精度钢齿(减速比 1:232)
- 空载速度:0.2sec/60°(50RPM)@24V
- 位置传感器分辨率:360°/4096
- ID范围:0-253
- 反馈信息:位置(Position);负载(Load);速度(Speed);输入电压(Input Voltage);工作电流(Current);工作温度(Temperature)
- 空载电流:200 mA
- 堵转电流:4 A
- 重量:485g
产品特性
- 可串联使用,同时控制多达 253 个伺服电机(前提是供电充分)并获取每个伺服电机的反馈信息
- 360°磁编码器,角度控制范围更大
- 高精度,角度控制精度达到360°/4096
- 可将任意角度设置为伺服电机中位,方便组装
- 加速度启停功能,运动效果更加柔和
- 紧凑的结构设计,产品外观更加美观
- 宽电压输入 9~24V,可以与2s或3s锂电池直接供电
- 大扭矩,可达到 120kg.cm@24V
- 可通过程序设置工作模式:舵机模式角度控制/电机模式可连续转动
硬件使用方法
- 你可以使用我们的总线舵机驱动板来控制总线伺服电机。
软件使用方法
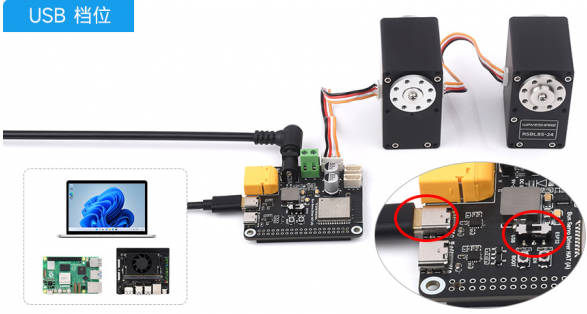
我们这里展示使用我们配套的总线舵机驱动板通过运行 Python 例程来控制 RSBL45-24 伺服电机的步骤。使用 Python 例程来直接控制伺服电机运动,驱动板必须要在 USB 档位才可以。
Windows部署Python环境
首先到Python官网下载最新版本Python的安装包。根据您的操作系统选择进行下载即可,我这里下载的是windows的,版本是3.11.5。
下载完成后,双击安装程序python-3.11.5-amd64,点击“Customize installation(自定义安装)”进入到“Optional Features”可选功能界面,这一界面保持勾选点击“Next”后进入到“Advanced Options”界面,注意一定要保持“Add Python to environment variables”的勾选,安装地址可以点击“Browse”自己修改,这里是默认安装地址,设置好后点击“Install”安装,等待安装完成即可。
安装好后,接下来我们来进行Python项目编译示例。
伺服电机 Python 运行示例
下载Python 的程序,解压后,接着在开始菜单栏中输入cmd打开Windows的命令提示符界面,输入“cd 文件夹路径”进入到STServo_Python项目文件夹下,这里虚拟环境已被创建,名称是stservo-env,接着输入:
stservo-env\Scripts\activate.bat
该命令用来激活虚拟环境。
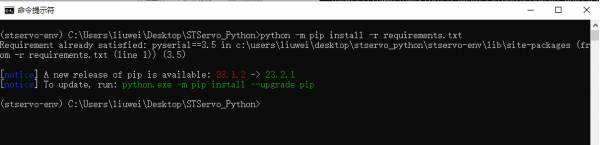
在STServo_Python项目下可以看见有一个requirements.txt文件,该文件是用于存放该项目会使用到的安装包列表。进入虚拟环境后,输入:
python -m pip install -r requirements.txt
使用该命令可以安装该项目使用到的安装包。可以看见这里使用到的安装包只有pyserial且已安装好。
将RSBL45-12 与驱动板上的 RS485 总线舵机接口相连接,并且通过驱动板上的 DC IN 9V-25V 的接口接入 9~24V 的供电电源,再使用 USB 线通过驱动板上 Bus-Servo 的 USB 接口与电脑相连接。在开始菜单栏中搜索设备管理器,可以查看新接入的端口号。
接着将要运行的例程中的设备名称修改为接入的端口号,我这里为COM11(不同电脑接入的端口号不一样)。
修改后就可以进行运行,这里以ping.py文件为例,输入:
python ping.py

以上是Python示例的简单教程。
资料
3D模型
2D图纸
程序
软件
开源结构
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841


-USB%E6%A1%A3%E4%BD%8D.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}