- 首页
- >
- 文章中心
- >
- 幸狐/LuckFox
- >
- Luckfox-PICO
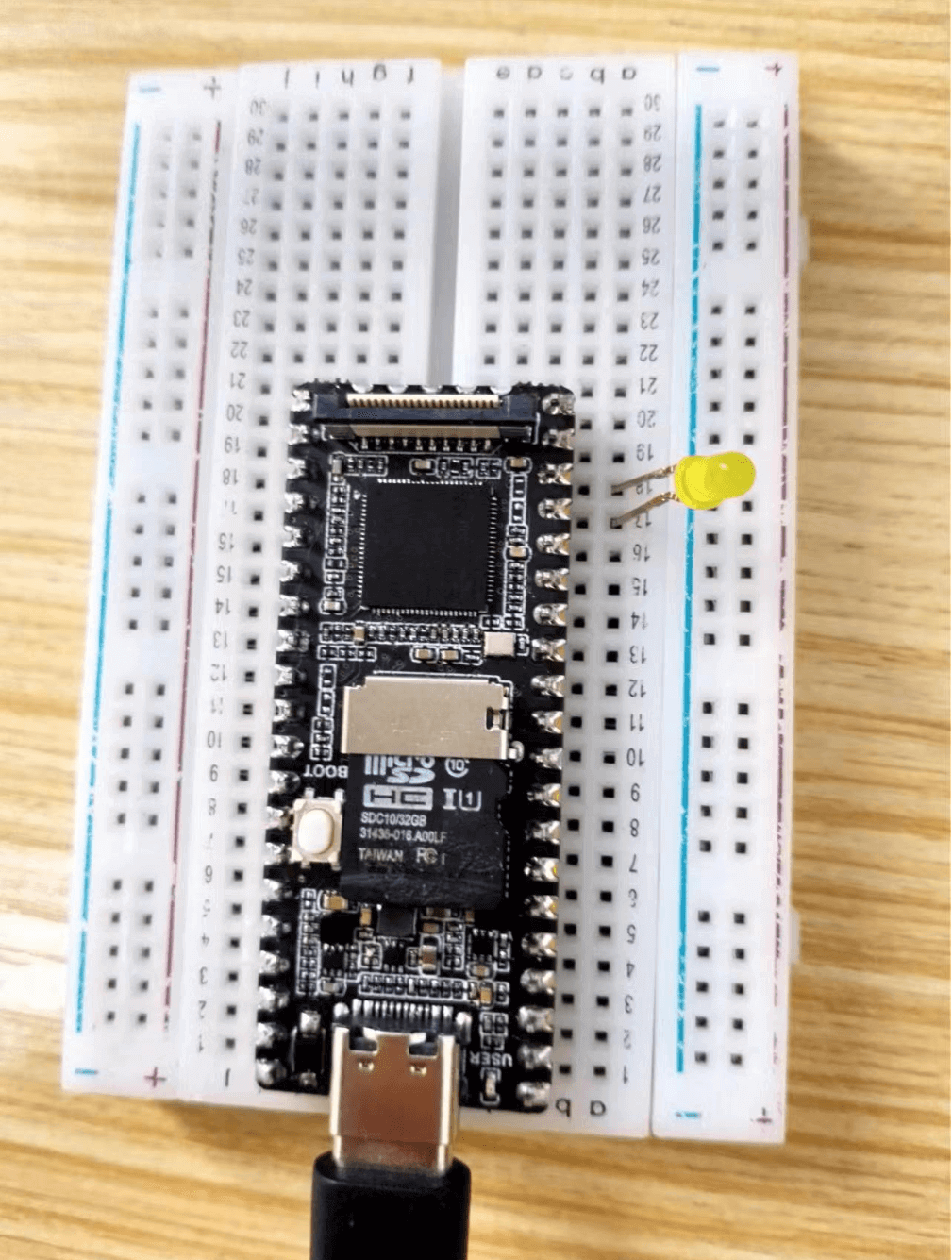
幸狐Luckfox Pico RV1103【PWM测试】
由于在 LuckFox Pico 和 LuckFox Pico Plus 引脚复用,会有引脚功能冲突,所以默认不能全部开启 PWM功能。
】使用 GPIO sysfs 接口控制 PWM:
1] 查看默认开启的 PWM 接口:
# ls -l /sys/class/pwm
lrwxrwxrwx 1 root root 0 pwmchip10 -> ../../devices/platform/ff490020.pwm/pwm/pwmchip10
lrwxrwxrwx 1 root root 0 pwmchip1 -> ../../devices/platform/ff350010.pwm/pwm/pwmchip1
lrwxrwxrwx 1 root root 0 pwmchip11 -> ../../devices/platform/ff490030.pwm/pwm/pwmchip11
lrwxrwxrwx 1 root root 0 pwmchip0 -> ../../devices/platform/ff350000.pwm/pwm/pwmchip0
2] 测试 PWM。将PWM1_M0(GPIO0_A4_d)导出到用户空间:
echo 0 > /sys/class/pwm/pwmchip1/export
3] 设置 PWM 周期 单位为ns,比如 1KHz 频率的周期就是 1000000ns:
echo 1000000 > /sys/class/pwm/pwmchip1/pwm0/period
4] 设置占空比:
#表示将占空比设置为 10%(100,000 纳秒为一个周期,持续时间为 10,000 纳秒)
echo 100000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 200000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 300000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 400000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 500000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 600000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 700000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 800000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
echo 900000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
#表示将占空比设置为 100%(1000000 纳秒为一个周期,持续时间为 1000000 纳秒)
echo 1000000 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
#将占空比设为0,相当于停止占空比输出
echo 0 > /sys/class/pwm/pwmchip1/pwm0/duty_cycle
5] 设置正常 PWM 极性:
#设置正常pwm极性
echo "normal" > /sys/class/pwm/pwmchip1/pwm0/polarity
#设置翻转pwm极性:
echo "inversed" > /sys/class/pwm/pwmchip1/pwm0/polarity
6] 使能 PWM :
echo 1 > /sys/class/pwm/pwmchip1/pwm0/enable
7] 关闭 PWM :
echo 0 > /sys/class/pwm/pwmchip1/pwm0/enable
8] 取消将 PWM 导出到用户空间:
echo 0 > /sys/class/pwm/pwmchip1/unexport
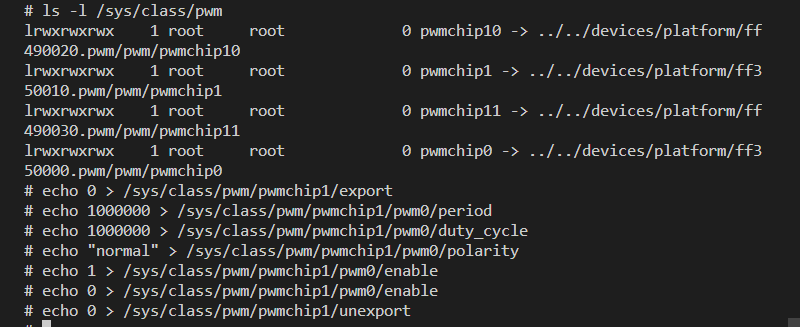
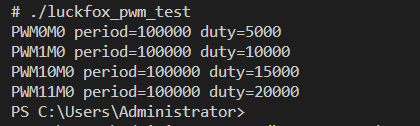
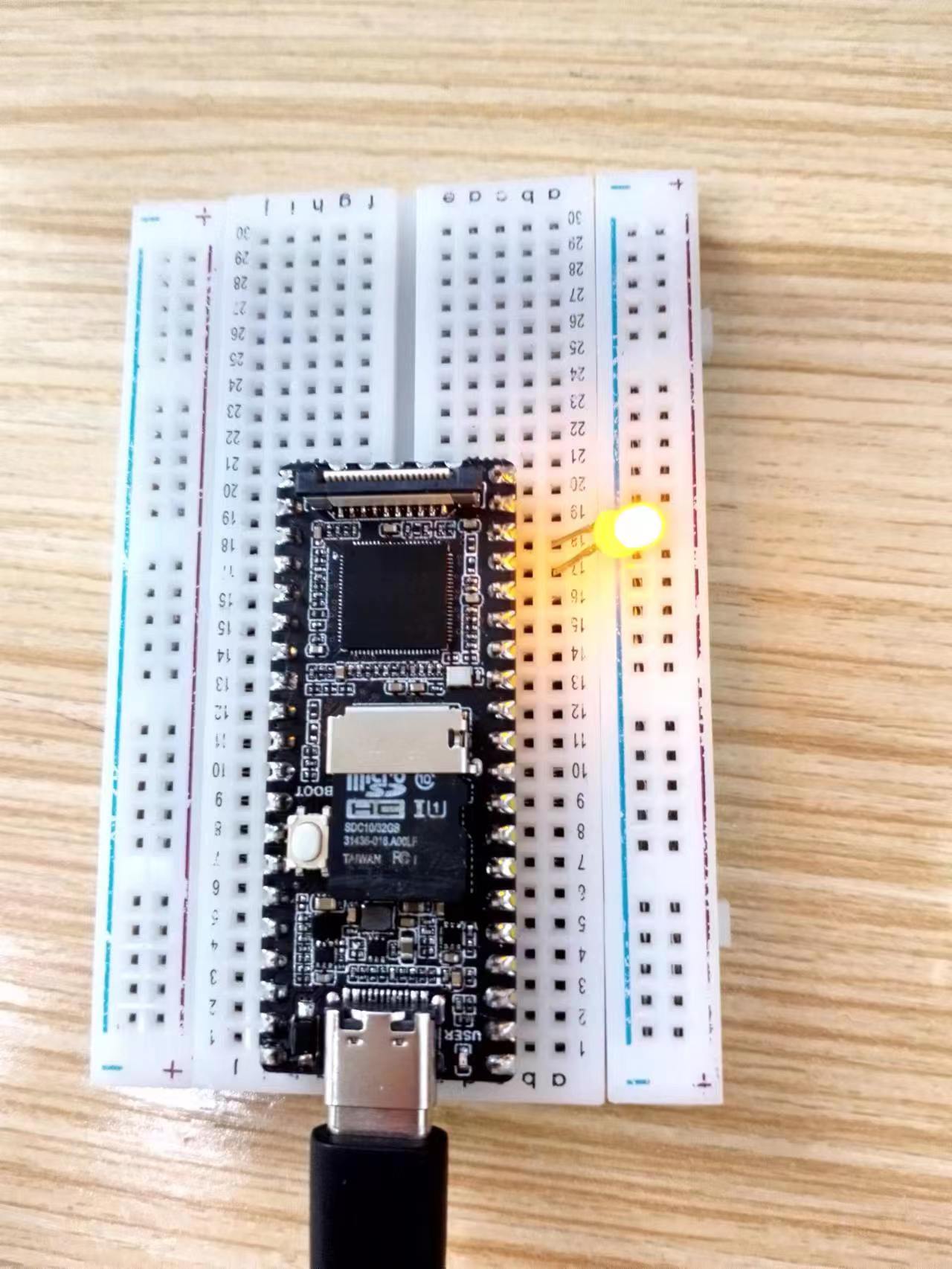
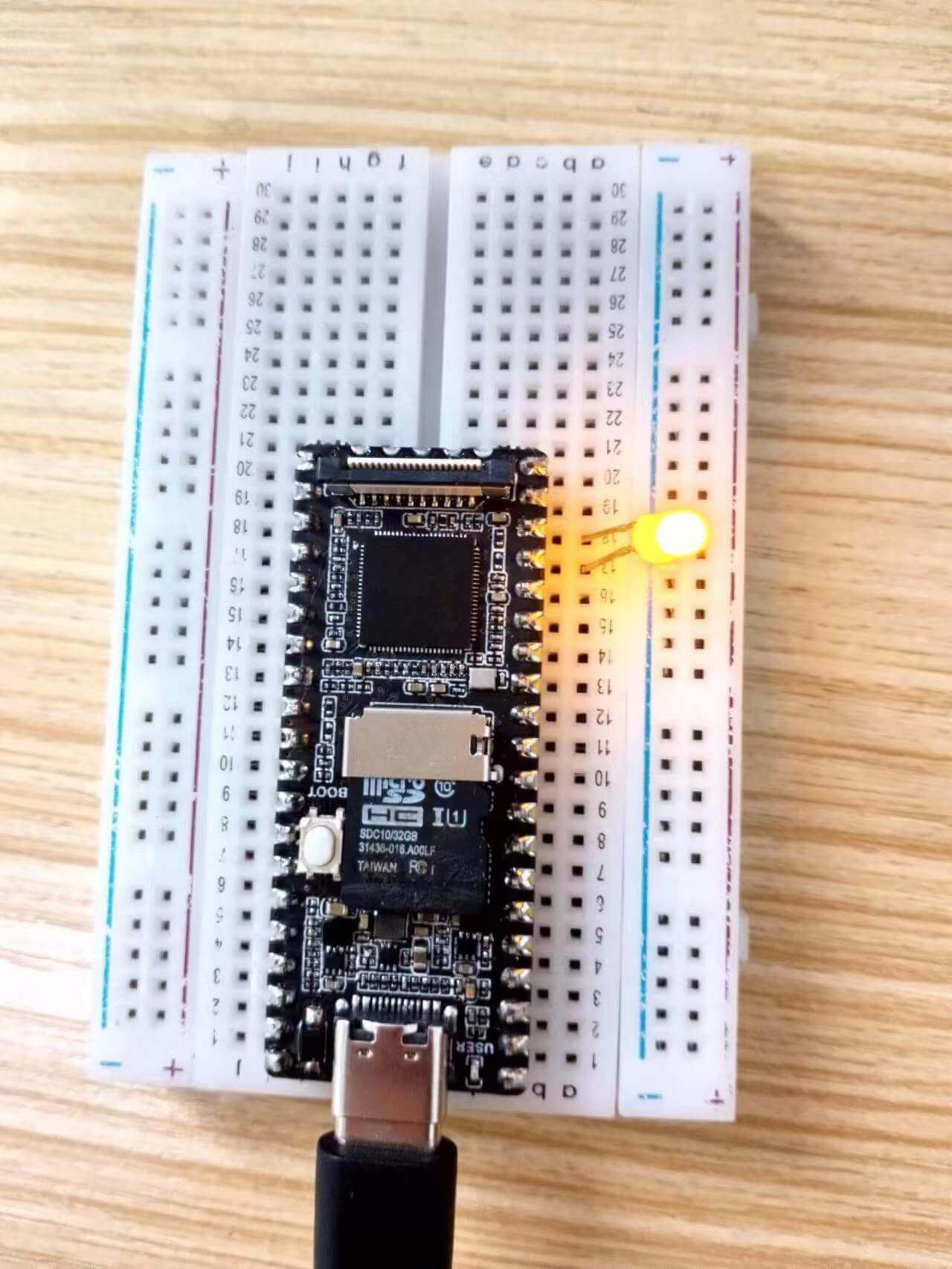
9] 操作流程截图: