

RP2040-PiZero教程
资料
配套资料
示例程序
原理图与位号图
官方资料
树莓派官方文档
- Raspberry Pi Pico入门学习MicroPython编程书籍(英文版)
- 树莓派相关书籍下载
- Raspberry Pi Pico原理图
- Pico引脚分布图
- Pico入门使用手册
- Pico C SDK使用手册
- Pico Python SDK使用手册
- Pico数据手册
- RP2040数据手册
- RP2040硬件设计参考手册
树莓派开源例程
开发软件
说明
产品概述
RP2040-PiZero 是一款微雪 (Waveshare) 设计的高性能、高性价比的微控制板,板载 DVI 接口、Micro SD 卡座和 PIO-USB 接口,引出兼容树莓派 40PIN GPIO 接口,方便开发并嵌入应用到产品中。
产品特性
- 采用了Raspberry Pi研发的 RP2040 微控制器芯片
- 搭载了双核 ARM Cortex M0 + 处理器,运行频率高达 133MHz 灵活时钟
- 内置 264KB 的 SRAM 和 16MB 的片上 Flash
- 采用Type-C接口,紧跟时代潮流,无需纠结正反插
- 板载 DVI 接口,可驱动绝大多数 HDMI 屏幕 (需要兼容 DVI 接口)
- 板载 PIO-USB 接口,可作为 USB 主机与从机
- 板载 Micro SD 卡座,可读写 Micro SD 卡
- 板载锂电池充放电接口,有利于RP2040-PiZero使用在一些移动场景
- USB1.1 主机和设备支持
- 支持低功耗睡眠和休眠模式
- 可通过 USB 识别为大容量存储器进行拖放式下载程序
- 2 个 SPI,2 个 I2C,2 个 UART,4 个 12 位 ADC,16 个可控 PWM 通道
- 精确的片上时钟和定时器
- 温度传感器
- 片上加速浮点库
- 8 个可编程 I/O (PIO) 状态机,用于自定义外设支持
尺寸图

Pico快速上手
固件下载
Arduino IDE 系列
安装Arduino IDE
- 首先到Arduino官网下载Arduino IDE的安装包。
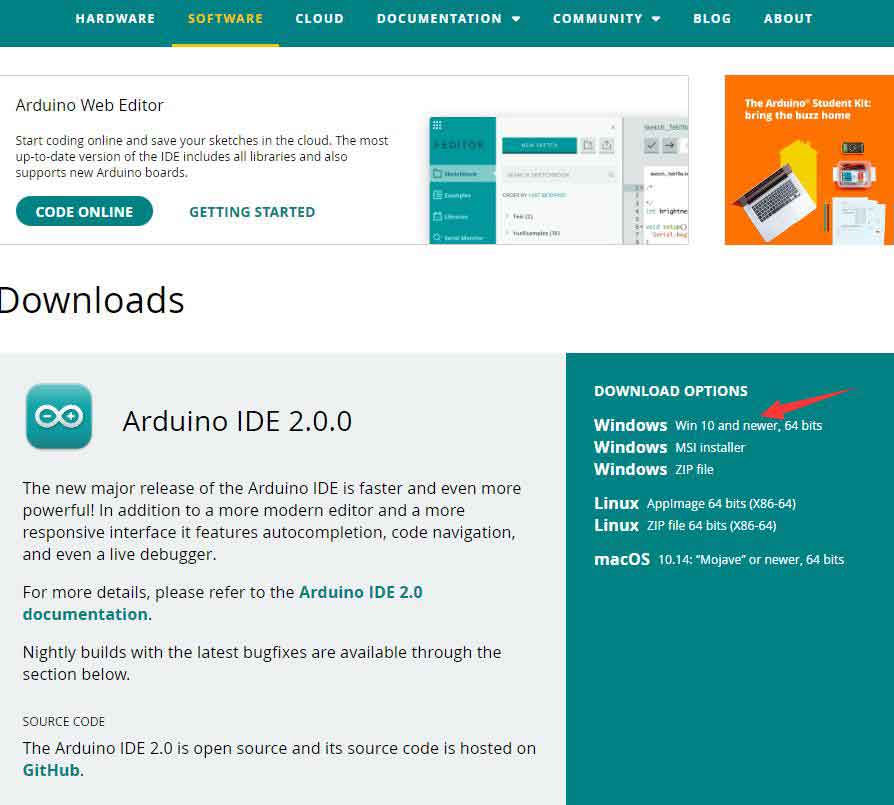
- 这里选择仅下载就可以了。

- 下载完成后,点击安装。

注意:安装过程中会提示你安装驱动,我们点击安装即可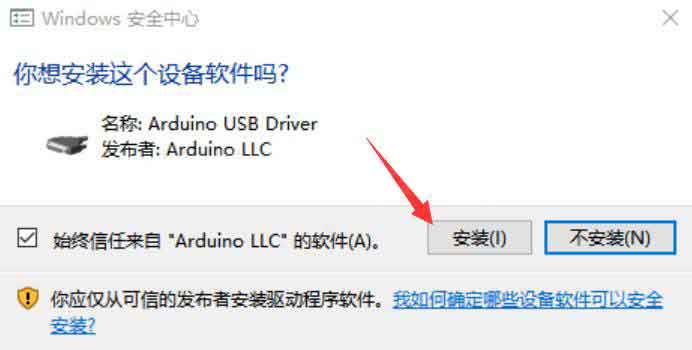
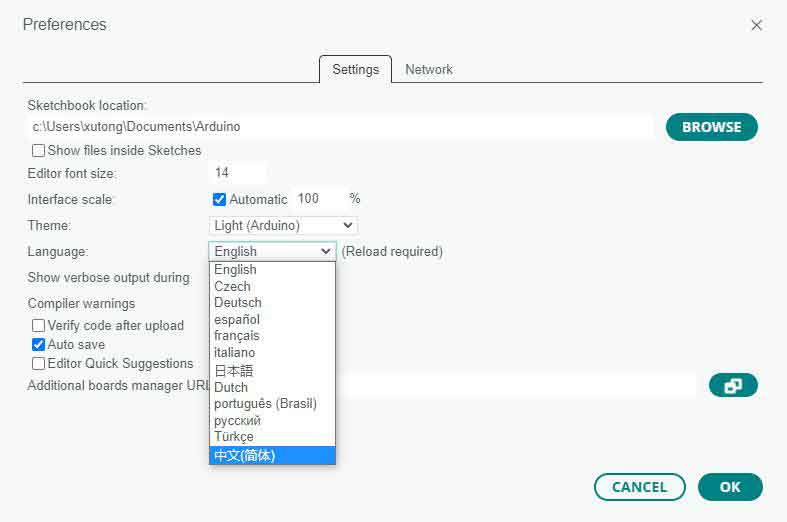
Arduino IDE中文界面
在Arduino IDE中安装Arduino-Pico Core
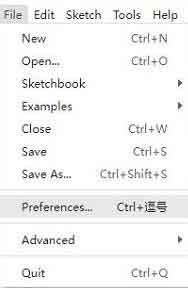
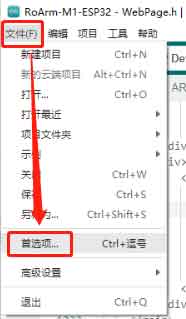
- 打开Arduino IDE,点击左上角的文件,选择首选项
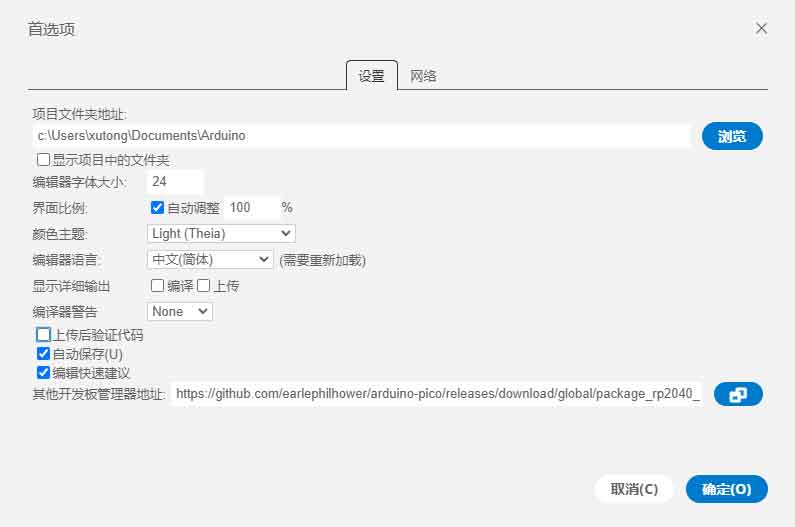
- 在附加开发板管理器网址中添加如下链接,然后点击OK
https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
注意:如果您已经有ESP32板URL,您可以使用逗号分隔 URL,如下所示:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
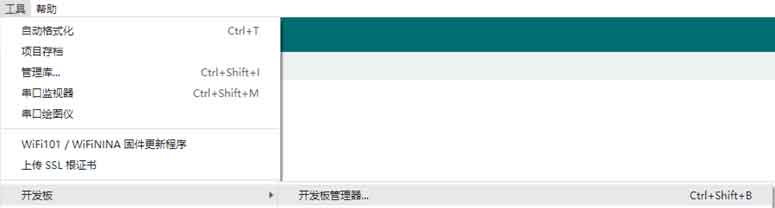
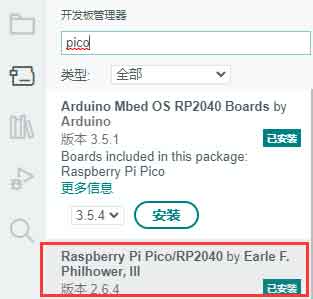
- 点击工具>开发板>开发板管理器>搜索pico,由于我的电脑已经安装过了,所以显示已安装
国内用户
- 因为网络原因,国内用户连接github并不稳定,我们另外提供了一份安装包,可以跳过在线的过程
- 若已经成功配置了pico环境,可以直接跳过本章
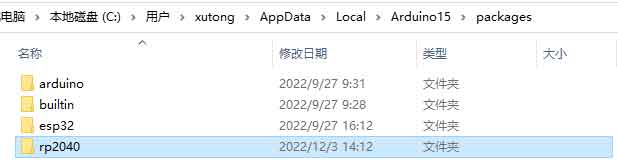
- 下载rp2040压缩包,将解压的rp2040文件夹复制到如下路径下
C:\Users\[username]\AppData\Local\Arduino15\packages
第一次上传程序
- 下载程序,打开arduino\PWM\D1-LED路径下的D1-LED.ino
- 点击工具>端口,记住已有的COM,不需要点击这个COM(不同电脑显示的COM不一样,记住自己电脑上已有的COM)
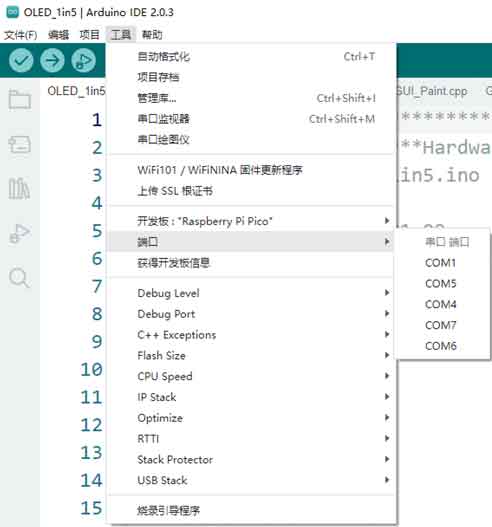
- 用USB线将驱动板和计算机连接起来,再点击工具>端口,第一次连接选择uf2 Board,上传完成后,再次连接就会多出一个COM

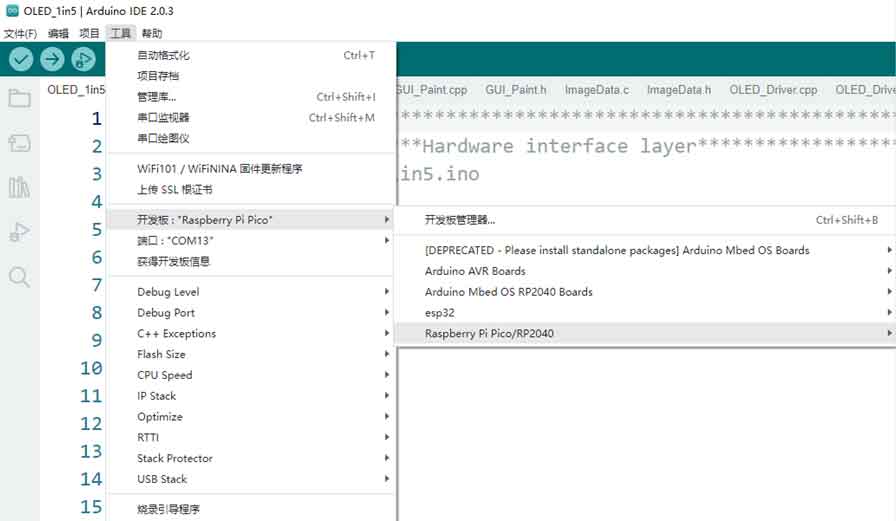
- 点击工具>开发板>Raspberry Pi Pico/RP2040>Raspberry Pi Pico

- 设置完成后,点击向右箭头上传将程序
- 如果期间遇到了问题,需要重新安装或者更换Arduino IDE版本时,卸载Arduino IDE需要卸载干净,卸载软件后需要手动删除C:\Users\[name]\AppData\Local\Arduino15这个文件夹内的所有内容(需要显示隐藏文件才能看到) 再重新安装
Pico-W系列教程(即将上线)
- 敬请期待
开源例程
MircoPython视频例程(github)
MicroPython固件/Blink例程(C)
树莓派官方C/C++示例程序 (github)
树莓派官方micropython示例程序 (github)
Arduino官方C/C++示例程序 (github)
示例程序
C例程
01-DVI
- 例程基于Wren6991的PicoDVI修改
主要目录解析
- apps目录:例程源码
- assets目录:原始图片与图片头文件
- include目录:默认引脚配置头文件
- libdvi目录:有关DVI驱动源码
- libgui目录:有关GUI源码
Hello DVI例程说明
- Hello DVI例程位于apps目录下的hello_dvi文件下
- 以640x480p 60Hz DVI模式,滚动显示一张分辨率为320x240p RGB565测试图片。
Gui Demo例程说明
- Gui Demo例程位于apps目录下的gui demo文件下
- 以640x480p 60Hz DVI模式,依次刷出白、红、黄、绿、青、蓝、紫、黑,再刷GUI图像
02-USB
主要目录解析
- examples:例程源码
- src:有关PIO-USB驱动源码
capture_hid_report例程说明
- capture_hid_report例程位于examples目录下的capture_hid_report
- PIO-USB将作为一个USB主机示例程序,用于打印从设备接收到的HID报告。
usb_device例程说明
- usb_device例程位于examples目录下的usb_device
PIO-USB将模拟为一个鼠标并每0.5s移动鼠标光标
Host_hid_to_device_cdc例程说明
- Host_hid_to_device_cdc例程位于examples目录下的Host_hid_to_device_cdc
Host_hid_to_device_cdc类似于capture_hid_report,从主机端口打印鼠标/键盘报告到设备端口的cdc。
03-MicroSD
主要目录解析
- tests:测试使用的源码
- FatFs_SPI:MicroSD有关驱动源码
例程说明
- 使用putty或者mobaxterm等终端工具,打开RP2040-PiZero对应的USB串行端口
- 输入回车,会显示以下信息
>
- 输入help指令可以得到可用指令,如下
setrtc <DD> <MM> <YY> <hh> <mm> <ss>: Set Real Time Clock Parameters: new date (DD MM YY) new time in 24-hour format (hh mm ss) e.g.:setrtc 16 3 21 0 4 0 date: Print current date and time lliot <drive#>: !DESTRUCTIVE! Low Level I/O Driver Test e.g.: lliot 1 format [<drive#:>]: Creates an FAT/exFAT volume on the logical drive. e.g.: format 0: mount [<drive#:>]: Register the work area of the volume e.g.: mount 0: unmount <drive#:>: Unregister the work area of the volume chdrive <drive#:>: Changes the current directory of the logical drive. <path> Specifies the directory to be set as current directory. e.g.: chdrive 1: getfree [<drive#:>]: Print the free space on drive cd <path>: Changes the current directory of the logical drive. <path> Specifies the directory to be set as current directory. e.g.: cd 1:/dir1 mkdir <path>: Make a new directory. <path> Specifies the name of the directory to be created. e.g.: mkdir /dir1 ls: List directory cat <filename>: Type file contents simple: Run simple FS tests big_file_test <pathname> <size in bytes> <seed>: Writes random data to file <pathname>. <size in bytes> must be multiple of 512. e.g.: big_file_test bf 1048576 1 or: big_file_test big3G-3 0xC0000000 3 cdef: Create Disk and Example Files Expects card to be already formatted and mounted start_logger: Start Data Log Demo stop_logger: Stop Data Log Demo


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}