

- 首页
- >
- 文章中心
- >
- 树莓派教程
- >
- 树莓派扩展板
- >
- 树莓派ZERO/3B/4B
树莓派舵机驱动板使用教程
前言
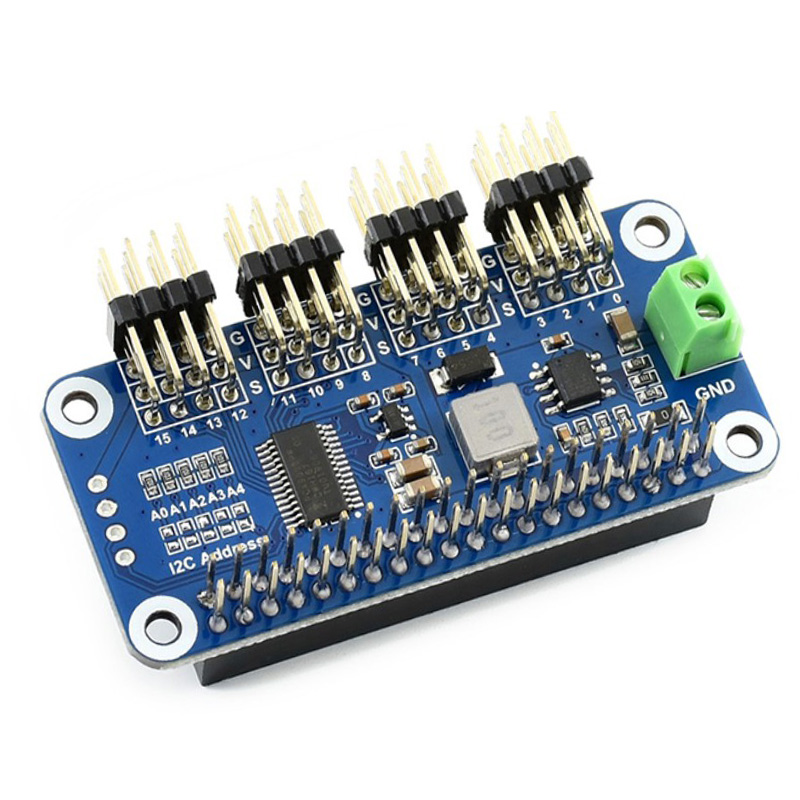
本产品是基于树莓派而设计的PWM/舵机扩展板,通过PCA9685芯片扩展16路舵机控制或者PWM输出,每个通道12位分辨率。通过I2C接口控制,无需占用额外的引脚。板载5V稳压芯片,可接电池供电,最大输出3A电流。适用于控制机械手臂,以及各种舵机机器人。
产品特性
- 输入电压VIN:6V~12V
- 舵机电压:5V
- 逻辑电压:3.3V
- 驱动芯片:PCA9685
- 控制接口:I2C
- 产 品 尺 寸:65mm x 30mm
- 固定孔通径:3.0mm
硬件说明

板子可以从树莓派上取电不需要额外供电。
也可以通过右边绿色端子VIN接电池供电,输入电压范围6V~12V。经过板载的5V稳压芯片输出5V电源给舵机和树莓派供电,最大输出电流3A。
A0~A4可以设置PCA9685芯片的I2C设备地址,可以同时接多个Servo Driver HAT
最上面的排针是舵机接口,黑色排针是GND(大部分舵机对应的是褐色线), 红色排针是5V电源,黄色排针是PWM信号线,有0~15个通道,可以同时接16个舵机。注意舵机线不要接反,否则舵机不会转动。
注意:
树莓派请使用独立供电,不要从模块上反向给树莓派供电,这样的供电是不安全的。
如果接大功率的舵机可能会出现供电不足,因为整个板子是5V的供电,这个5V连接着树莓派和舵机供电,功率太大会拉低树莓派5V电源,导致欠压树莓派重启,可以按照FAQ的指示,把板载上的0R电阻去除,右侧绿色VIN端子接外部电源(6-12V)
树莓派使用
提供python控制,功能包括简单的PCA9685库测试程序,wifi遥控程序以及蓝牙遥控程序。
打开I2C接口
在终端执行:
- sudo raspi-config
- 选择 Interfacing Options -> I2C ->yes 启动 i2C 内核驱动

- sudo reboot
安装库
- sudo apt-get updata
- sudo apt-get install python-pip
- sudo pip install RPi.GPIO
- sudo apt-get install python-smbus
下载示例程序,并解压到指定目录
- sudo apt-get install p7zip-full
- wget http://www.waveshare.net/w/upload/6/6c/Servo_Driver_HAT.7z
- 7zr x Servo_Driver_HAT.7z -r -o./Servo_Driver_HAT
- sudo chmod 777 -R Servo_Driver_HAT
- cd Servo_Driver_HAT/Raspberry\ Pi/
运行测试例程
python例程
- #如果你是python2,树莓派默认是python2.7
- cd python/
- sudo python PCA9685.py
- #如果你是python3
- cd python3/
- sudo python3 PCA9685.py
实验现象:将舵机接到0号通道,0号通道的舵机从0度转到180度,然后又从180度转动到0度,不断重复循环。
wifi遥控程序
- cd Wifi-Control/
- sudo python main.py
操作与现象:发送端(手机或者电脑)和接收端(树莓派),需要连接到同一个局域网。程序是通过TCP协议传输数据,程序运行后会显示树莓派IP,服务器端口号是8000.
手机打开APP,选择Wifi遥控,输入对应的IP地址和端口号,点击连接.

连接成功进入控制界面,点击按键可以控制0~4号通道的舵机正反转。

也可在电脑上运行Qt软件控制,如下图

蓝牙遥控程序
执行:
- sudo apt-get update
- sudo apt-get upgrade -y
- sudo apt-get dist-upgrade -y
- sudo apt-get install pi-bluetooth bluez bluez-firmware blueman
- sudo usermod -G bluetooth -a pi
- sudo vi /etc/systemd/system/dbus-org.bluez.service
- sudo reboot
启动/增加SPP,开启蓝牙设备
- sudo vi /etc/systemd/system/dbus-org.bluez.service

重启树莓派后,输入hciconfig命令(类似ifconfig命令)查看蓝牙服务

如果有看到hci0设备则蓝牙已经开启工作。如果没有则没有识别到蓝牙设备
运行如下命令启动程序
- cd Servo_Driver_HAT/python/Bluetooth-Control
- sudo ./Bluetooth.sh
操作与现象:程序运行后会提示等待蓝牙连接,手机App选择蓝牙遥控,点击扫描,发现raspberrypi设备并连接。

连接程序后进入控制界面,点击按键可以遥控0~4通道的舵机正反转了。

注意:如果接收到的命令不对,可能需要在APP中config一下对应按键按下和松开时发送的命令。

注意:树莓派默认是只有180s的发现时间,如果想一直可以发现和配对,如果通过修改下面的文件配置。
- sudo vi /etc/bluetooth/main.conf
找到下面两个语句并去掉注释。

程序兼容python3 ,运行的时候将python替换成python3即可。
更多关于树莓派wifi和蓝牙遥控可以参考AlphaBot2:
http://www.waveshare.net/wiki/AlphaBot2
https://www.waveshare.com/wiki/AlphaBot2
Jetson nano
提供python控制
安装库
安装函数库
- 打开终端界面,输入以下指令安装相应的函数库
- sudo apt-get update
- sudo apt-get install python3-pip
- sudo pip3 install Jetson.GPIO
- sudo groupadd -f -r gpio
- sudo usermod -a -G gpio your_user_name
- sudo cp /opt/nvidia/jetson-gpio/etc/99-gpio.rules /etc/udev/rules.d/
- sudo udevadm control --reload-rules && sudo udevadm trigger
【注意】your_user_name 是你使用的用户名,比如说 waveshare
- 安装I2C
- sudo apt-get install python-smbus
- 安装图像处理库:
- sudo apt-get install python3-pil
- sudo apt-get install python3-numpy
下载示例程序,并解压到指定目录
- sudo apt-get install p7zip
- wget http://www.waveshare.net/w/upload/6/6c/Servo_Driver_HAT.7z
- 7zr x Servo_Driver_HAT.7z -r -o./Servo_Driver_HAT
- sudo chmod 777 -R Servo_Driver_HAT
- cd Servo_Driver_HAT/Jetson\ Nano/
运行测试例程
- python2
- cd python2/
- sudo python test.py
- python3
- cd python3/
- sudo python3 test.py

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}