

CAN FD TO RS232/RS485 使用教程
说明
产品概述
CAN FD TO RS232/RS485 是导轨式 CAN FD 和 RS232/RS485 双向互转设备,具备高速低延迟、性能稳定、易用和高性价比等特点,支持五种数据转换模式:透明、透明带 ID、标准协议、Modbus 和自定义帧头帧尾,可实现 CAN 与串口设备互联,兼容 CAN FD 及 CAN 2.0A/2.0B 协议。
产品采用工业级设计,-40°C ~ 85°C 稳定运行,支持 9V ~ 36V 宽电压供电,仲裁域波特率 5Kbps ~ 1Mbps、数据域 100Kbps ~ 5Mbps。
设备支持上位机软件配置,自带 120Ω 总线电阻 (拨码快速接入),支持导轨安装,配置便捷,安装高效。
产品参数
| 分类 | 参数 | 数值 |
|---|---|---|
| 基本参数 | 工作电压 | DC 9V ~ 36V |
| 尺寸 | 110 × 27 × 85.6 (mm) | |
| 安装方式 | 导轨式安装 | |
| Reload 按键 | 长按可恢复出厂设置 | |
| 指示灯 | POWER、WORK、COM 和 CAN | |
| 接口参数 | CAN 口规格 | 1 路 CAN 口、支持 CAN FD、兼容 CAN 2.0A/2.0B |
| CAN 口波特率 | 仲裁域波特率:5Kbps ~ 1Mbps 数据域波特率:100Kbps ~ 5Mbps | |
| 终端电阻 | 内置 2 个 120Ω 终端电阻, 拨任意一位拨码到 ON,并联一个 120Ω 电阻, 两位都到 ON,并联两个 120Ω 电阻 | |
| 串口规格 | 支持一路 RS485 或 RS232 接入 | |
| 工作环境 | 工作温度 | -40℃ ~ 85℃ |
| 储存温度 | -40℃ ~ 105℃ | |
| 工作湿度 | 5%RH ~ 95%RH(无凝露) | |
| 存储湿度 | 5%RH ~ 95%RH(无凝露) | |
| 软件功能 | Modbus 网关 | CAN FD 转 Modbus RTU(主 / 从) |
| 发送报文 | 支持 64 条发送报文 | |
| 接收报文 | 支持 64 条接收报文 | |
| 转换模式 | 透明转换、透明带 ID 转换、标准转换、Modbus 转换和自定义帧头帧尾转换 | |
| CAN ID | 支持标准帧、扩展帧 | |
| 帧 ID 过滤 | 支持仅标准帧、仅扩展帧和自定义输入帧 ID(最多 32 组) | |
| 转换方向 | 支持双向转换、仅串口转 CAN 和仅 CAN 转串口 | |
| 固件升级 | 支持上位机进行固件升级 | |
| 参数配置 | AT 指令、上位机软件配置 | |
| 防护参数 | 静电防护 | 空气放电 8KV,接触放电 6KV |
| 电快速脉冲群 | 电源回路 2KV;RS485/RS232 回路 1KV;CAN 回路 1KV | |
| 浪涌干扰度测试 | 电源回路差模 1KV,共模 2KV;CAN 回路共模 2KV |
硬件说明
指示灯说明
| 指示灯 | 颜色 | 功能说明 |
| POWER灯 | 红色 | 上电常亮,断电熄灭 |
| STA灯 | 绿色 | 闪烁:设备正常运行,频率 1s; 频闪:进入 CAN 总线被动错误状态; 常亮:CAN 总线运行异常 |
| COM灯 | 绿色/红色 | 绿灯闪烁:表示串口有数据正在接收 红灯闪烁:表示串口有数据正在发送 |
| CAN灯 | 红色 | 绿灯闪烁:表示 CAN 口有数据正在接收 红灯闪烁:表示 CAN 口有数据正在发送 |
软件操作
- 注:以透传模式为例
CAN FD转换器基本参数配置
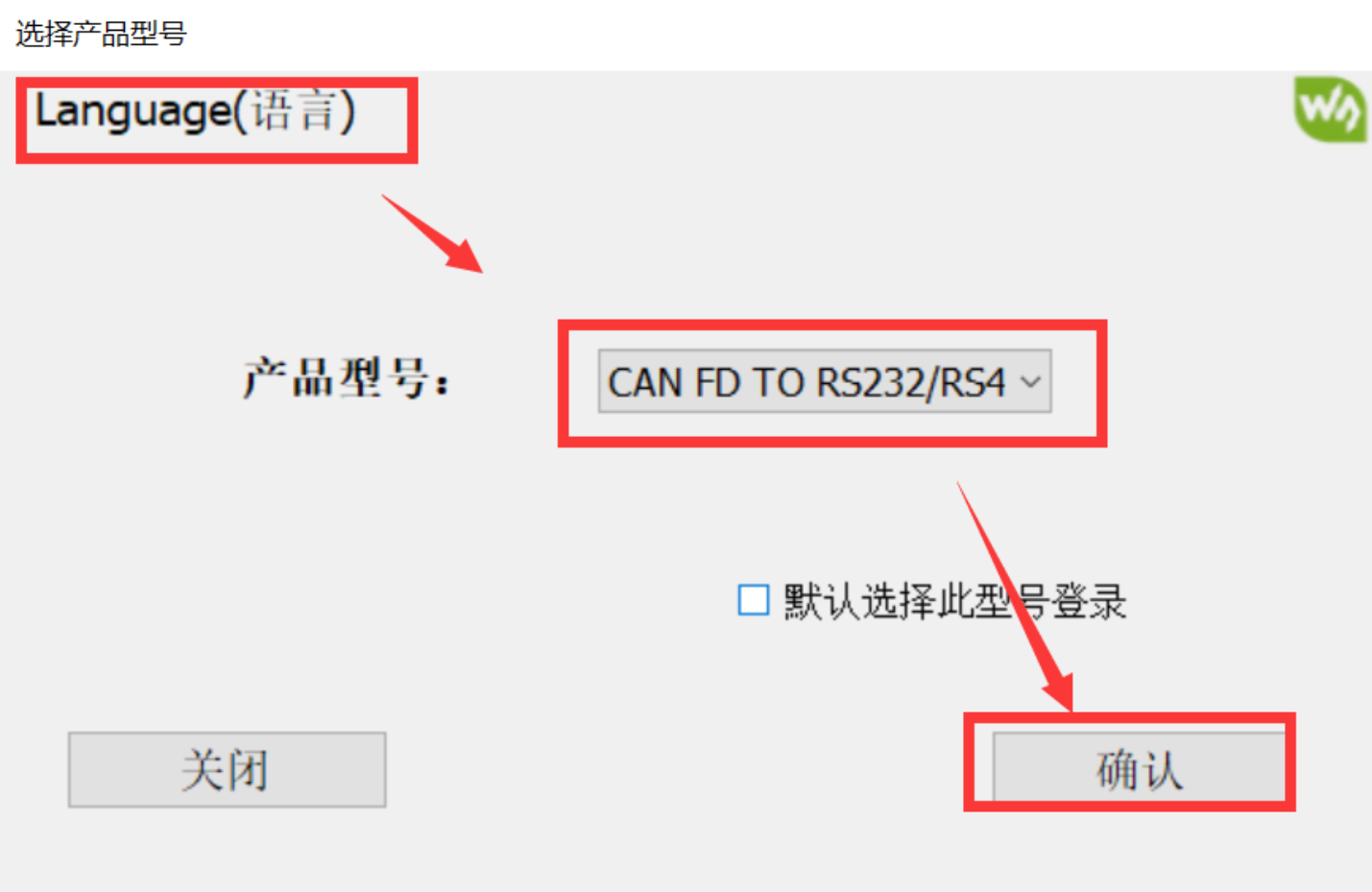
- 打开WS-CAN-FD-Converter,选择CAN FD TO RS232/RS485。(软件默认是英文,可以修改为中文)
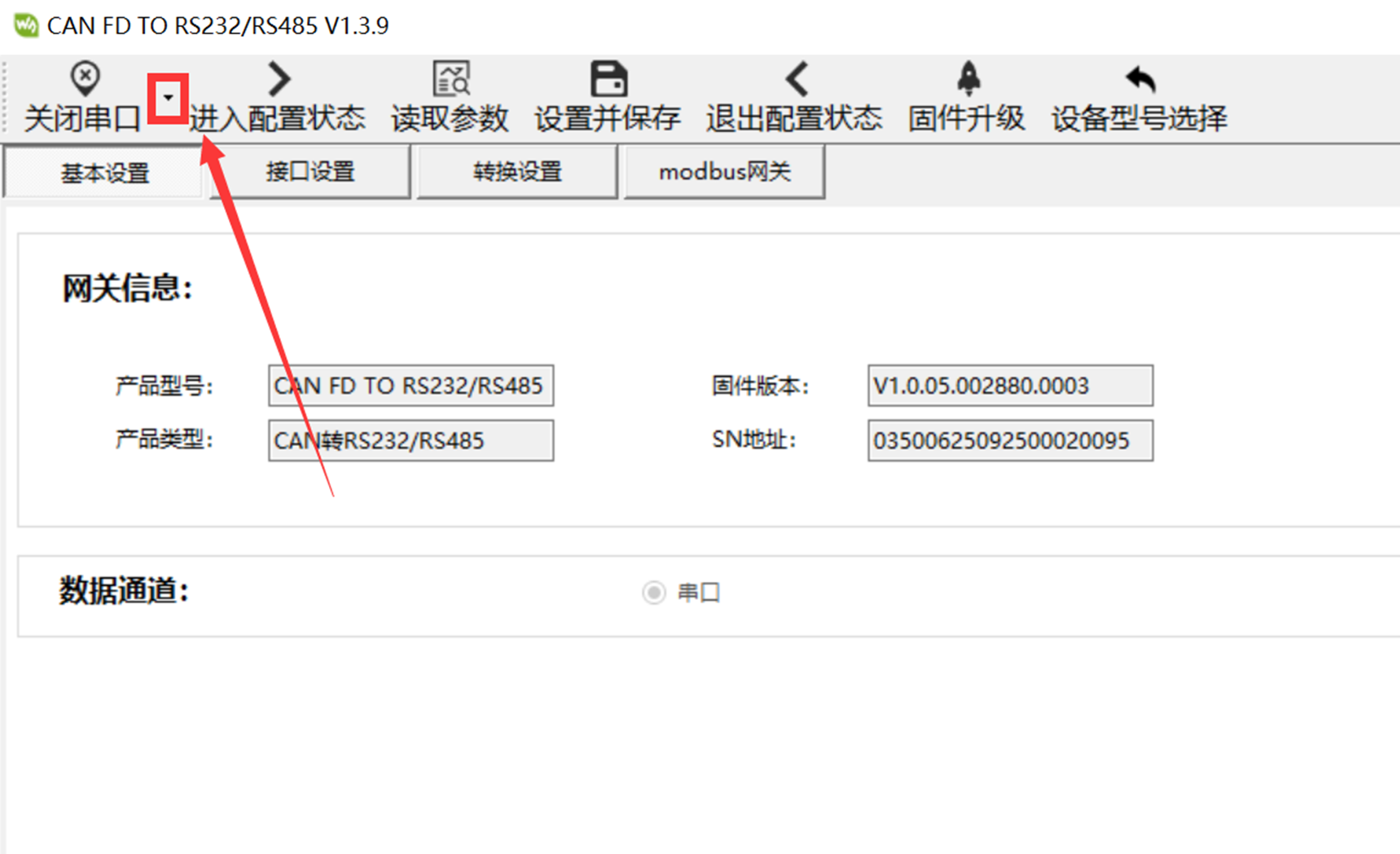
- 点击 打开串口 旁边的三角形选择串口配置,再点击串口旁边的小三角形,然后修改串口配置
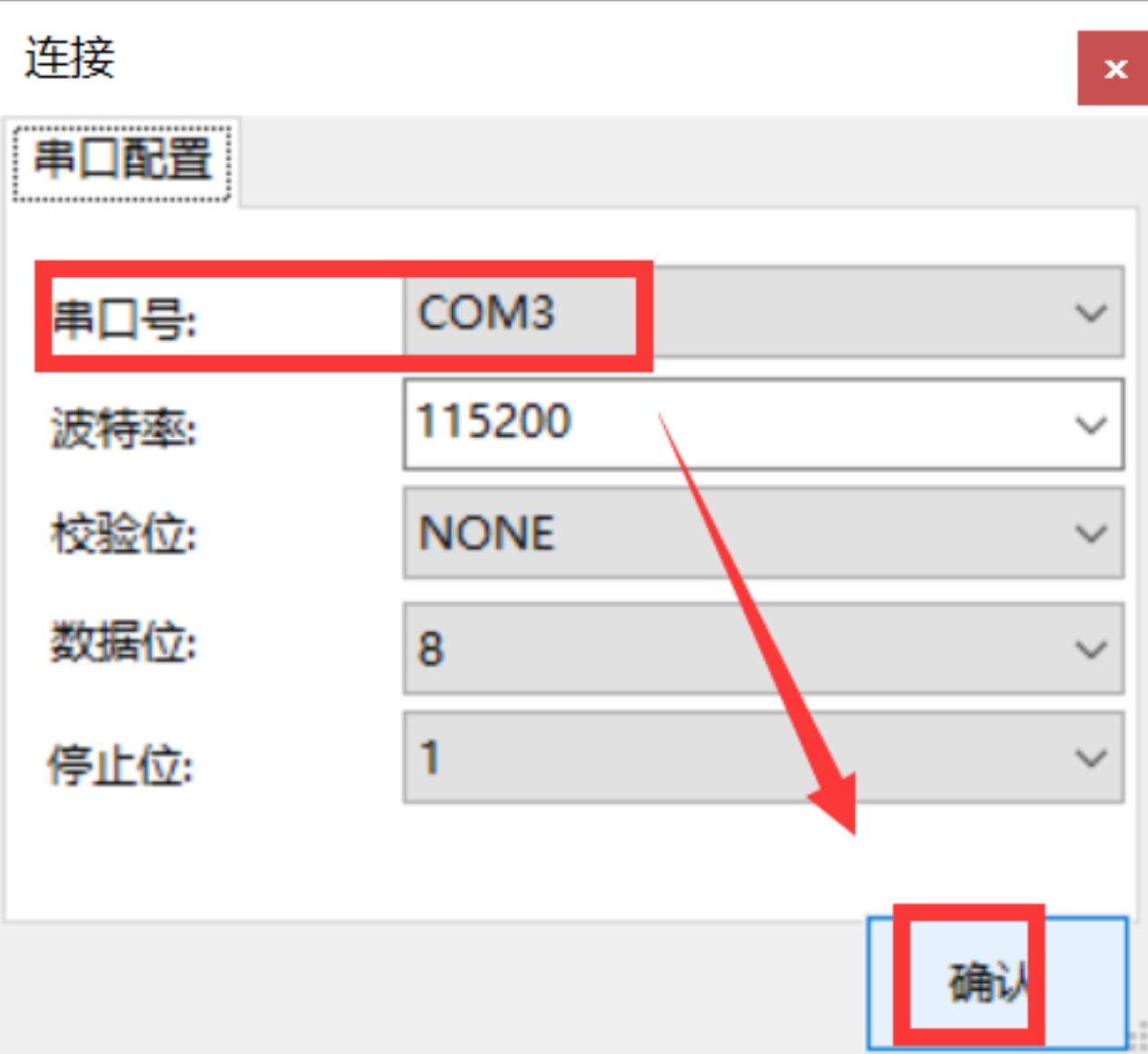
- 修改串口号为USB TO RS232/485的实际串口号
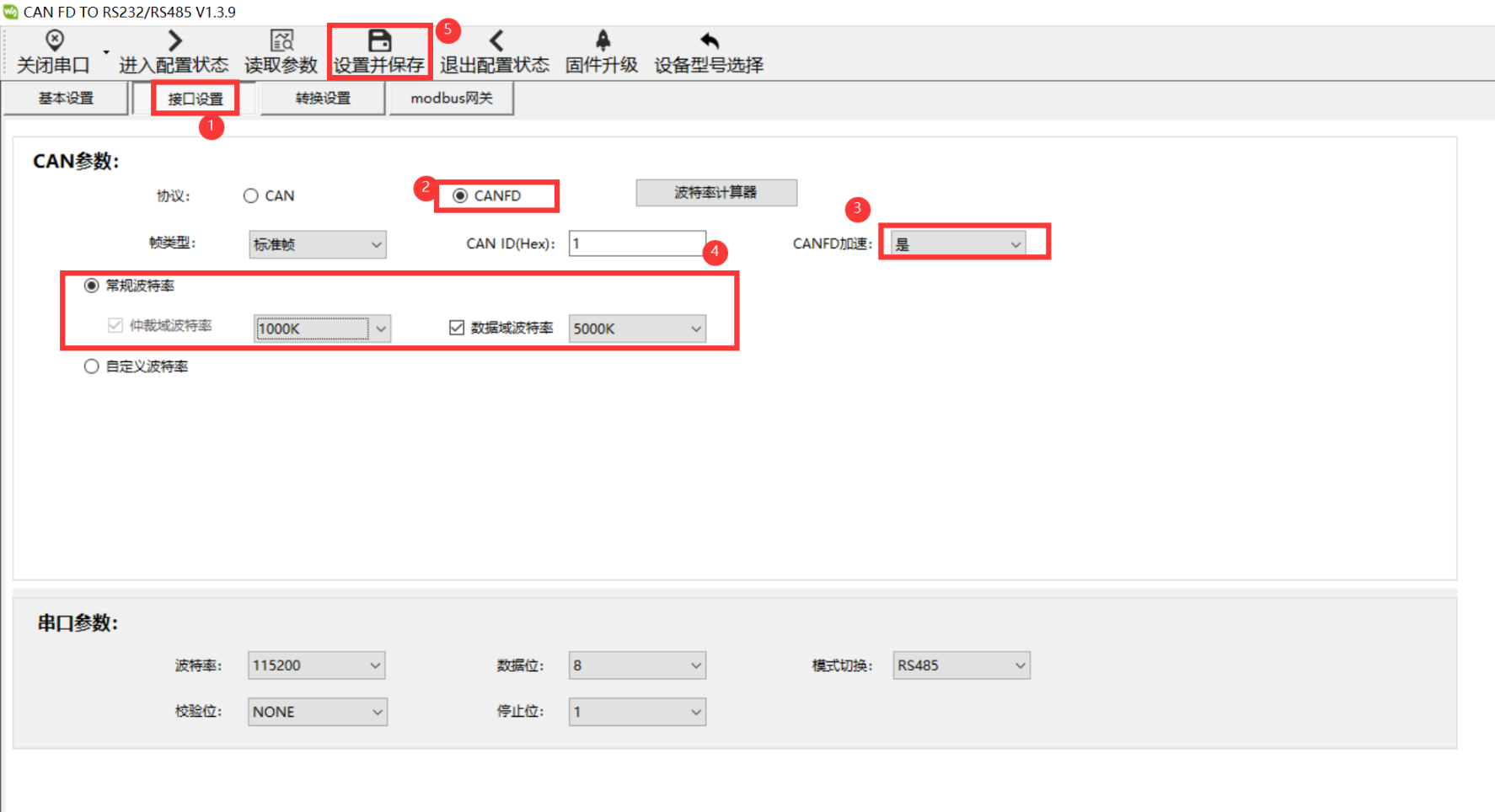
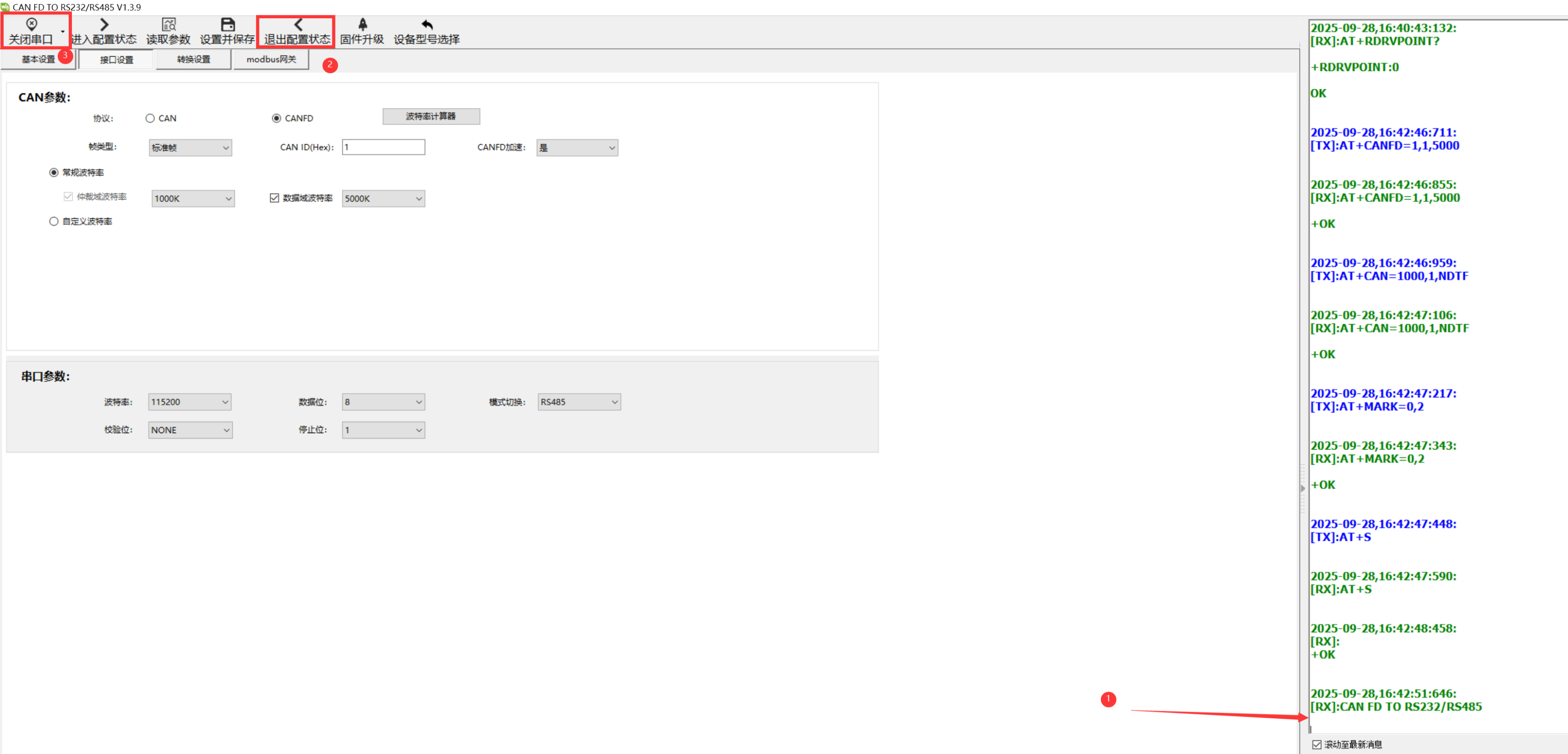
- 配置完串口参数后,依次点击:打开串口、进入配置状态、读取参数。(若右侧消息栏有报错、重新点击读取参数,直至没有报错)

- 点击设置CAN FD模式、启用CAN FD加速、仲裁域波特率为1000k、数据域波特率为5000k,然后点击设置并保存
- 确认右侧指令无报错提示后,依次点击退出配置状态、关闭串口就可以结束设备配置。右侧指令有报错需要重新重新保存或重新配置
实例演示
接线说明
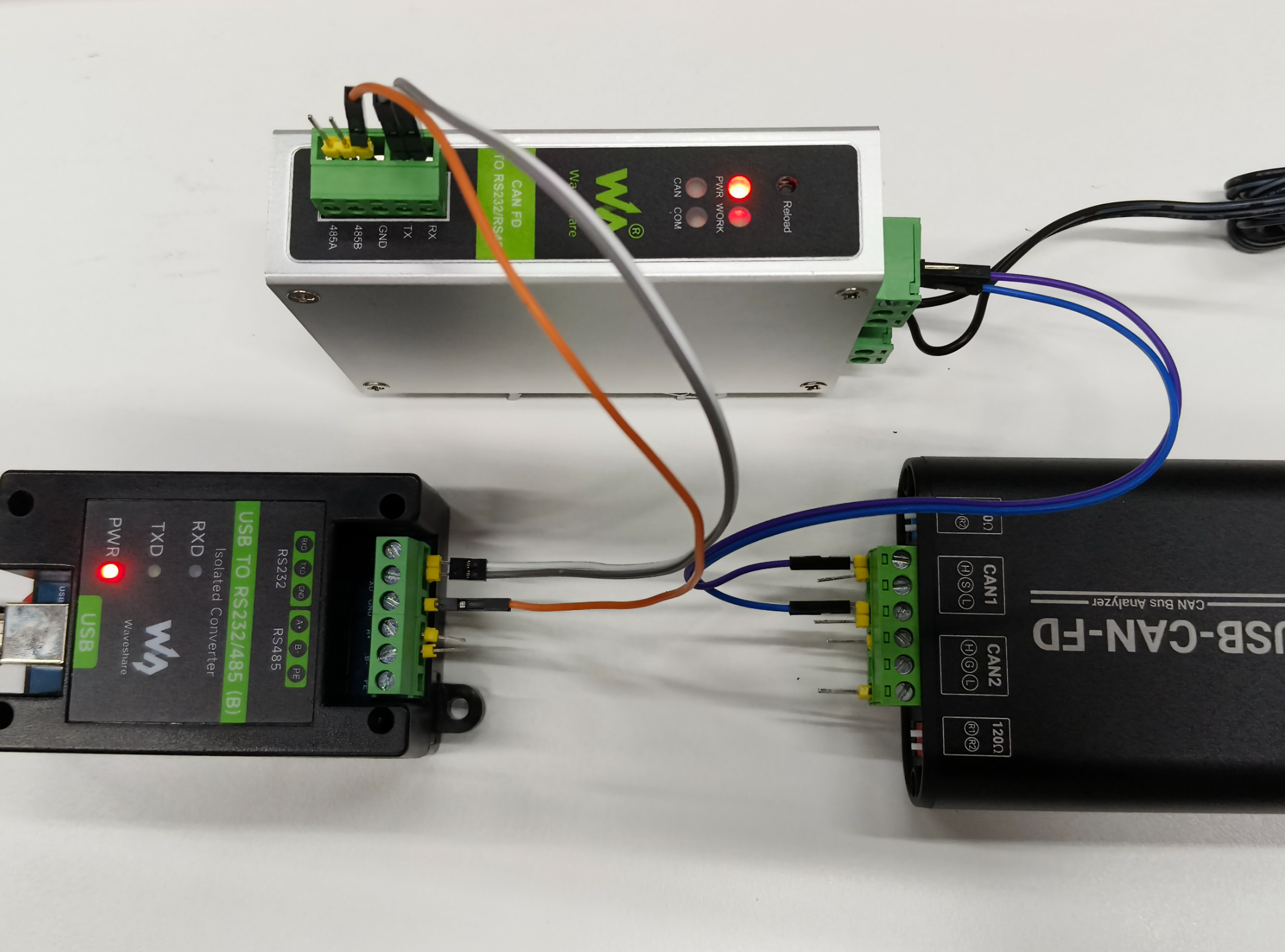
CAN
1、CAN FD TO RS232/RS485 的 CAN-H 接 USB-CAN-FD 的 CAN1-H
2、CAN FD TO RS232/RS485 的 CAN-L 接 USB-CAN-FD 的 CAN1-L
RS232
1、CAN FD TO RS232/RS485 的 RS232-GND 接 USB TO RS232 (B) 的RS232-GND
2、CAN FD TO RS232/RS485 的 RS232-RX 接 USB TO RS232 (B) 的 RS232-TX
3、CAN FD TO RS232/RS485 的 RS232-TX 接 USB TO RS232 (B) 的 RS232-RX
USB_CANFD TOOL通信软件配置
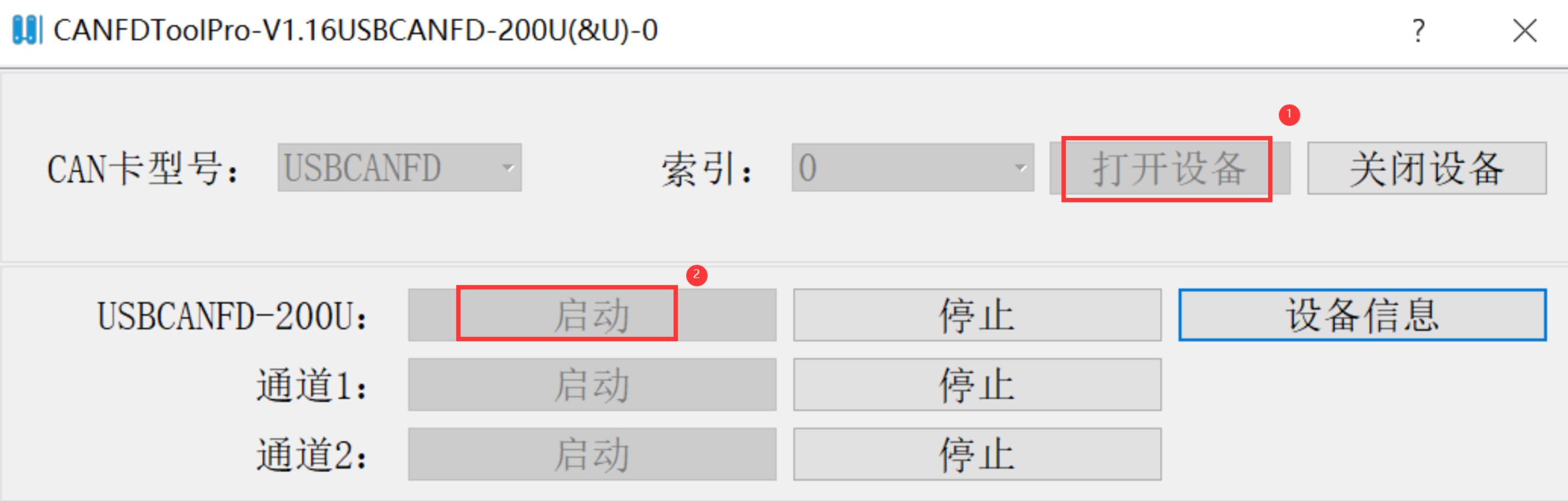
- 打开测试软件“USB_CANFD TOOL.exe”,点击设备管理
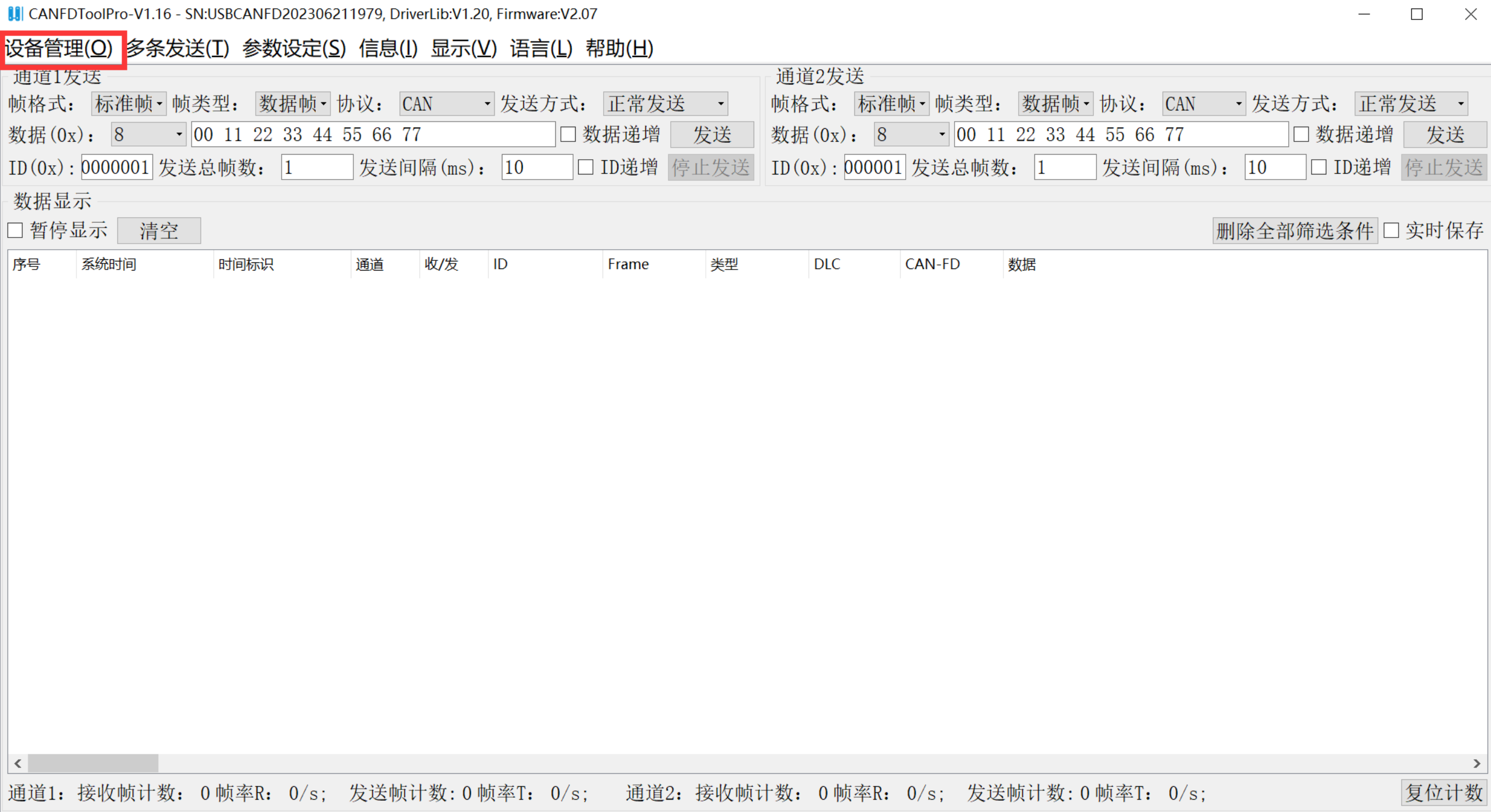
- 点击索引旁边的“打开设备”,再点击USBCANFD- 200U旁边的启动
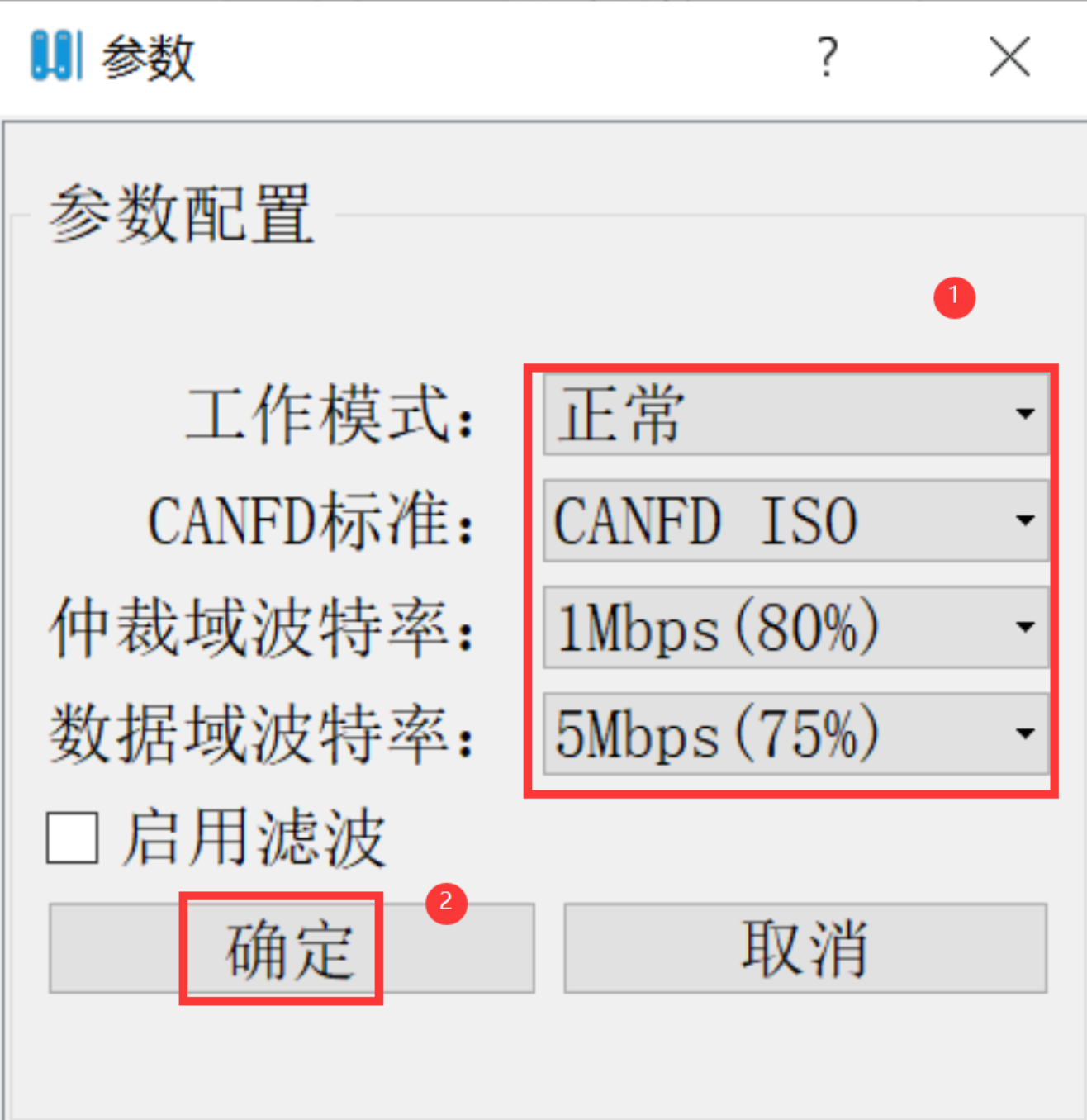
- 工作模式选择“正常”、CAN FD标准选“CAN FD ISO”,仲裁域波特率”1Mbps“,数据域波特率”5Mbps“,最后点“确定”
SSCOM软件配置
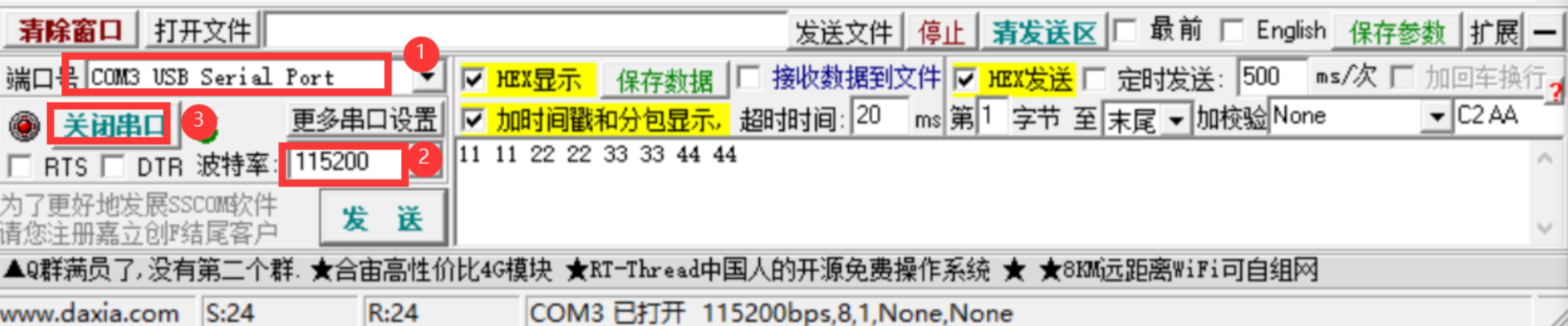
- 打开测试软件“SSCOM.exe”,串口连接到的计算机的串口号COM5(根据具体情况选择),选择 CAN FD TO RS232/RS485 串口默认波特率115200,点打开串口。
接口收发通信测试
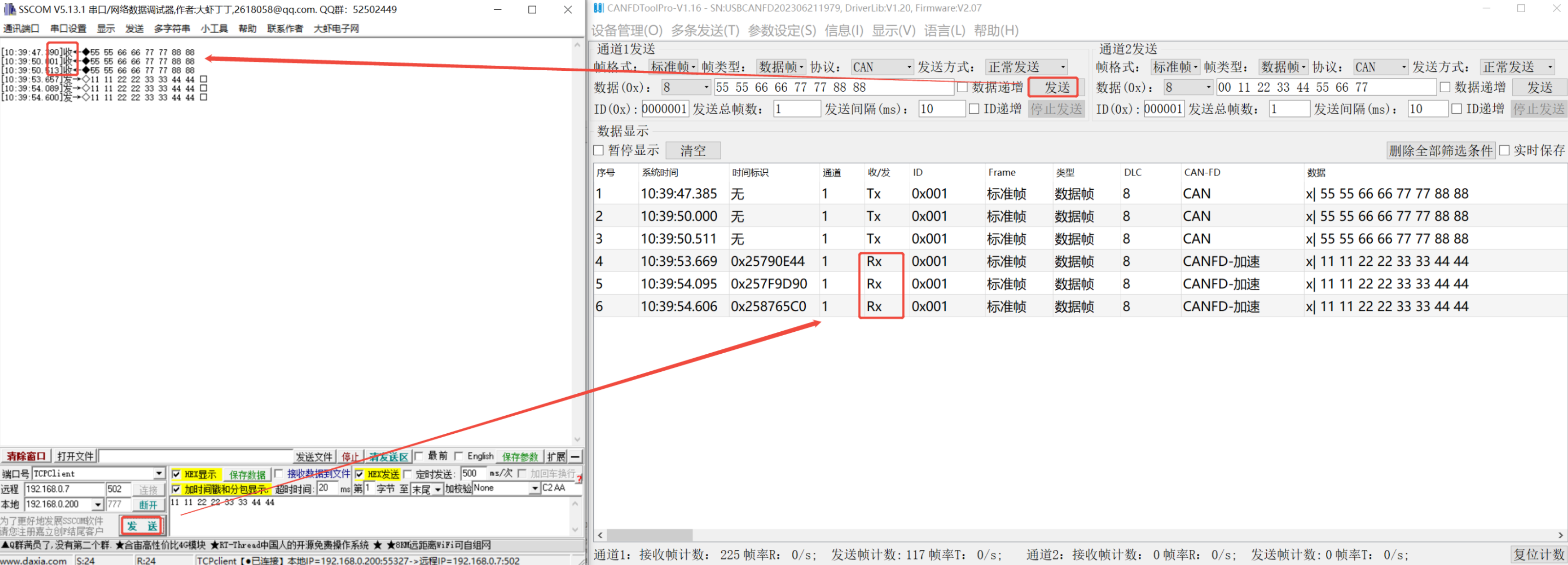
- USB_CANFD TOOL点击发送消息,发送数据 55 55 66 66 77 77 88 88,SSCOM软件勾选HEX十六进制接收数据55 55 66 66 77 77 88 88。
- SSCOM软件点击发送消息,发送数据 11 11 22 22 33 33 44 44,USB_CANFD TOOL勾选HEX十六进制接收数据 11 11 22 22 33 33 44 44。
转换模式使用说明
透明转换
- 透明转换方式下,接收到一侧总线的数据就立即转换发送至另一总线侧,不附加数据,也不对数据做任何修改。这样既实现了数据格式的交换又没有改变数据内容,对于两端的总线来说转换器如同透明的一样。
- CAN报文帧信息(帧类型部分)和帧ID来自用户事先的配置,并且在转换过程中帧类型和帧ID一直保持不变。用户可以选择是否将帧信息和帧ID进行转换。
- 这种方式下不会增加用户通讯负担,而能够实时的将数据原样转换,能承担较大流量的数据的传输。
串口 转 CAN(FD)
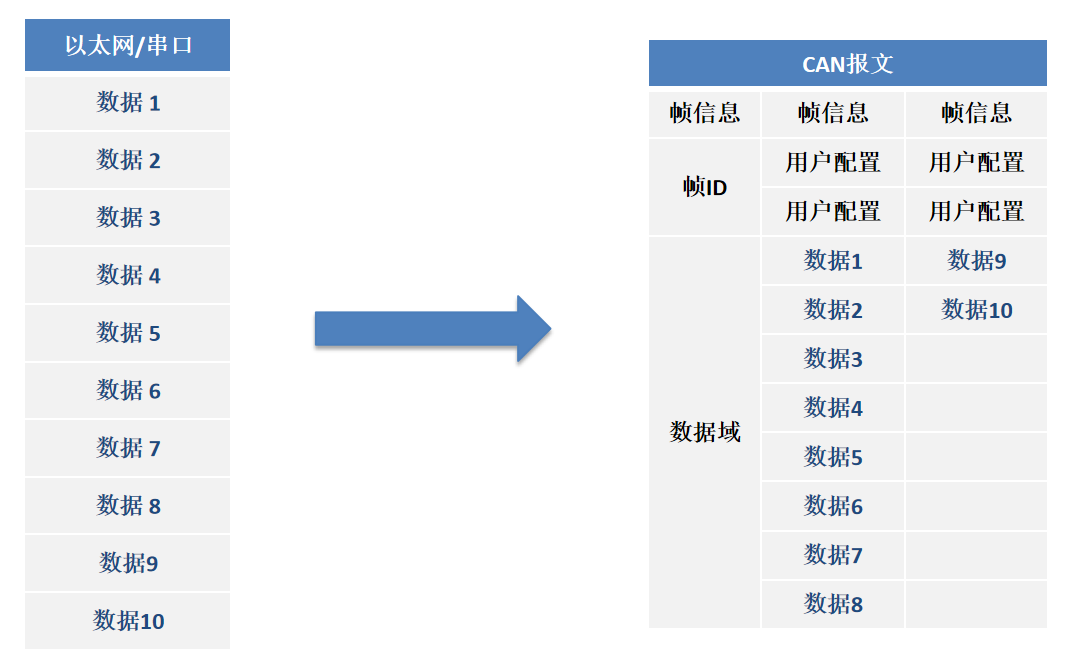
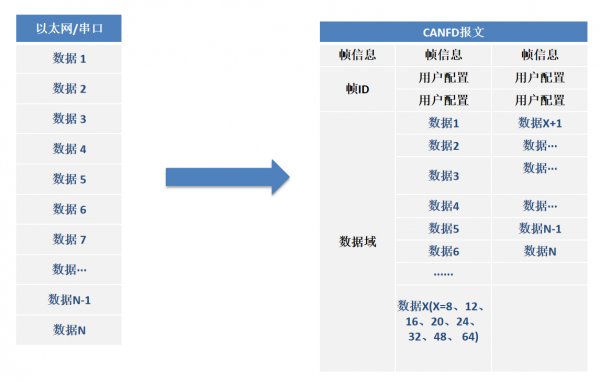
- 串口转 CAN 报文:串行帧的全部数据依序填充到 CAN 报文帧的数据域里。转换器一检测到串行总线上有数据后就立即接收并转换。帧信息(帧类型部分)和帧 ID 需预先配置。
- CAN模式:每帧数据最大 8 字节。
- CANFD模式:每帧数据最大 64 字节。注意:当数据长度超过 8 字节时,必须符合 CANFD 的 DLC 能编码的长度才能保证准确转换,即长度为 12、16、20、24、32、48、64,否则转换器会自动将拆分成合适长度的几个 CANFD 报文。
- 串口 转 CAN
- 串口 转 CAN FD
- 串口 转 CAN FD
CAN(FD)转串口
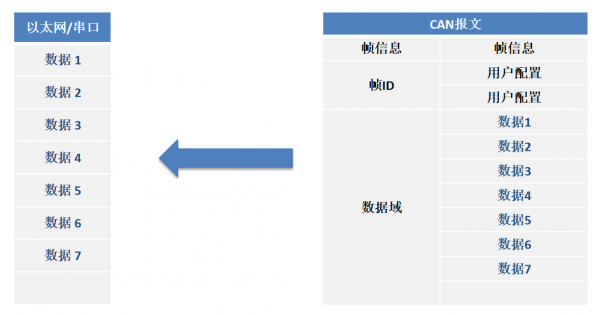
- 对于CAN总线的报文,同样是收到一帧CAN(FD)报文就立即转发一帧。
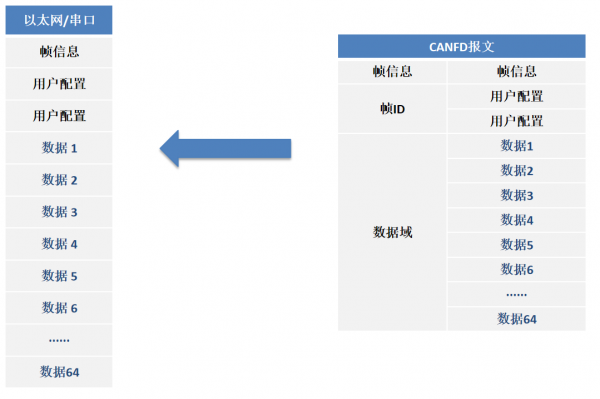
- 如果配置开启了使能帧信息,转换器工作时会将CAN(FD)报文的帧信息添加在串行帧的第一个字节。未选中时不转换CAN(FD)的帧信息。
- 如果配置开启了使能帧ID,转换器工作时会将CAN(FD)报文的帧ID添加在串行帧的帧数据之前,帧信息之后(如开启使能帧信息)
CAN转串口数据(未开启使能帧信息/使能帧ID) CANFD转串口数据(开启使能帧信息/使能帧ID)
- CAN 转 串口 (未开启使能帧信息/使能帧ID)
- CAN 转 串口 (未开启使能帧信息/使能帧ID)
- CAN FD 转 串口 (开启使能帧信息/使能帧ID)
- CAN FD 转 串口 (开启使能帧信息/使能帧ID)
转换示例
串口: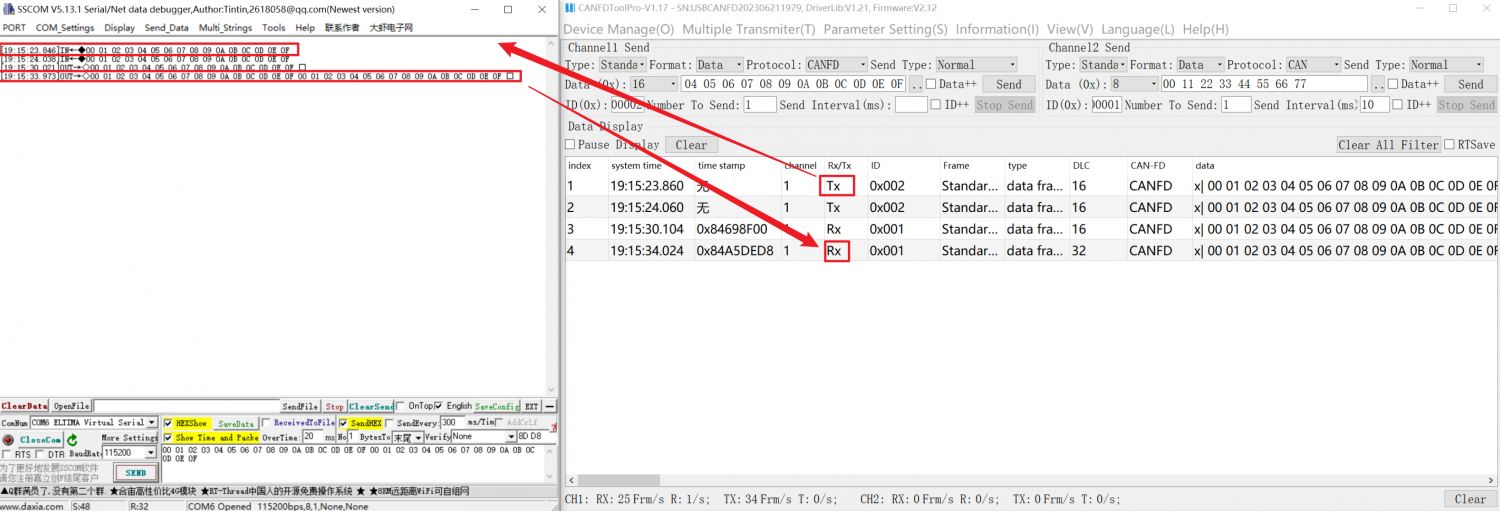
透明带 ID 转换
- 透明带标识转换是透明转换的特殊用法,也不附加协议。该方式能将串口数据中的“地址”转换到 CAN(FD)报文的标识域中,其中帧 ID 在串口数据中的起始位置和长度均可配置。转换器在转换时会提取出这个帧 ID ,填充在 CAN(FD) 报文的帧 ID 域里,作为该串口数据转发时的 CAN(FD)报文的 ID。同样的,在 CAN 报文转换成串口数据的时候也把 CAN(FD)报文的 ID 转换在串口数据的相应位置。
- 在这种方式下,转换器能最大限度地适应用户的自定义协议。
- 注意:在该转换模式下,配置软件的 CAN 参数设置项的“CAN ID”无效,因为此时发送的标识符(帧 ID)是由上述的串口数据中的数据填充的。
串口转CAN(FD)
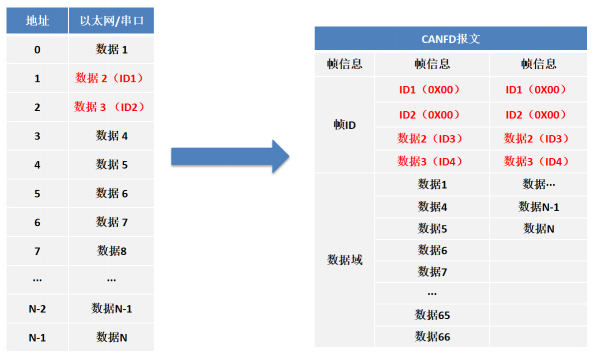
- 配置CAN(FD)帧类型和串口数据中所带有CAN(FD)报文的“帧ID“的起始地址和长度。其中起始地址的范围是0~7;长度范围是标准帧:1~2、扩展帧:1~4。
- 转换时根据事先的配置将串口数据中的CAN(FD)报文“帧ID“,对应全部转换到CAN(FD)的帧ID域中。若配置的透明带ID长度少于CAN(FD)报文的帧类型的帧ID长度,则在CAN(FD)报文中帧ID的高字节补0。
- 对于CAN(FD)报文,收到一帧就立即转发一帧,每次转发的时候,根据事先配置的CAN(FD)帧ID在串口数据中的位置和长度,把接收到的CAN(FD)报文中的ID作相应的转换。其它数据依序转发。
- 注意:如果CAN(FD)帧ID长度大于设置的透明带ID长度,则只取低位字节转换到串行帧对应位置。举例:CAN帧ID为01020304,设置的透明带ID长度为2,则只将0304转换到串行帧中对应位置。
- 串口 转 CAN
- 串口 转 CAN
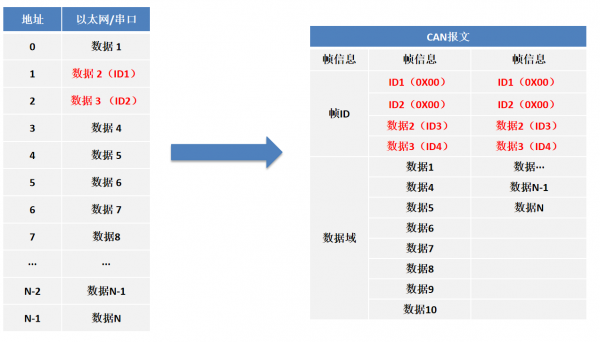
- 串口 转 CAN FD
- 串口 转 CAN FD
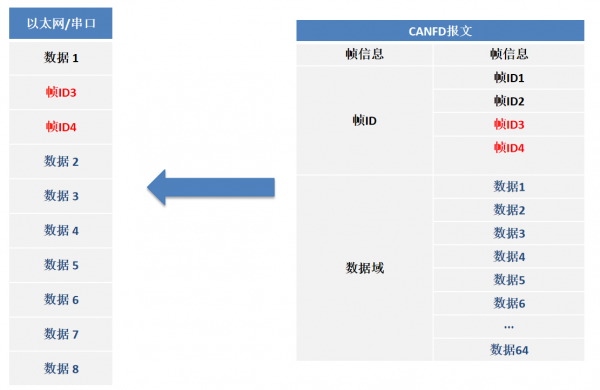
CAN(FD)转串口
- 对于CAN(FD)报文,收到一帧就立即转发一帧,每次转发的时候,根据事先配置的CAN(FD)帧ID在串口数据中的位置和长度,把接收到的CAN(FD)报文中的ID作相应的转换。其它数据依序转发。
- 注意:如果CAN(FD)帧ID长度大于设置的透明带ID长度,则只取低位字节转换到串行帧对应位置。举例:CAN帧ID为01020304,设置的透明带ID长度为2,则只将0304转换到串行帧中对应位置。
- CAN 转 串口
- CAN 转 串口
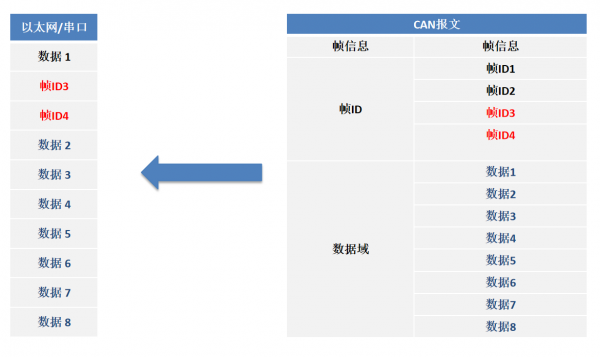
- CAN FD 转 串口
- CAN FD 转 串口
转换示例
串口: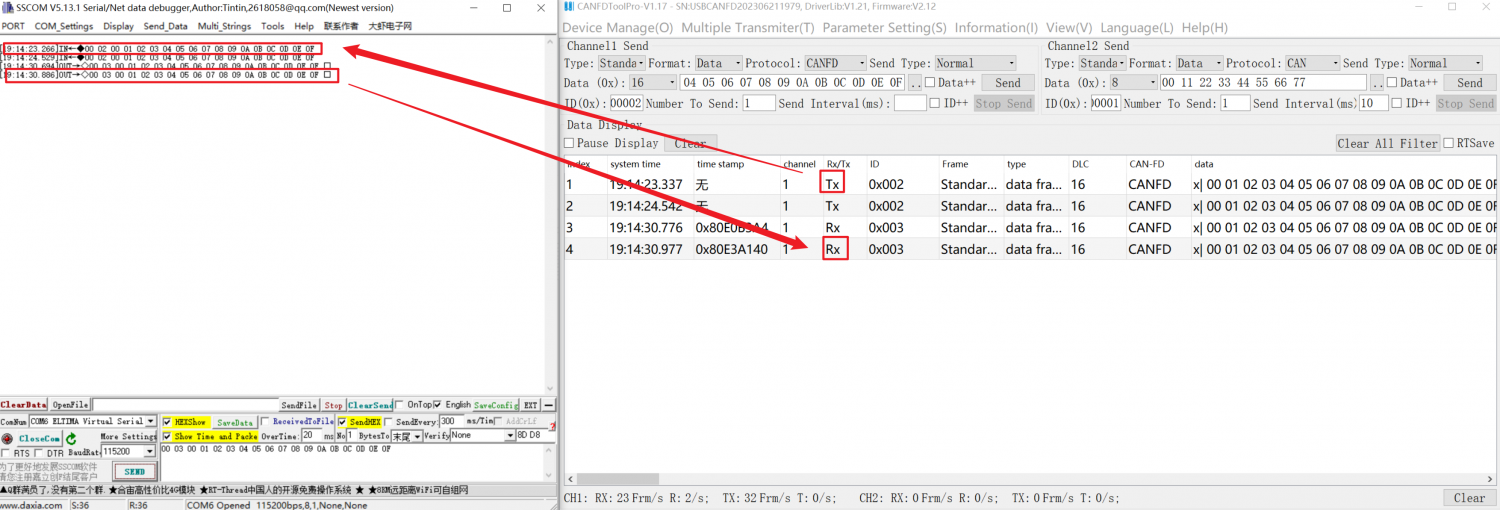
标准协议转换
- 标准 CAN 帧格式,每个 CAN 帧包含 13 个字节,13 个字节内容包括 CAN 帧信息(1 字节)+ 帧 ID(4 字节) +数据帧(8 字节)。
- 标准 CANFD 帧格式,每个 CANFD 帧包含 69 个字节,69 个字节内容包括 CANFD 帧信息(1 字节)+ 帧 ID(4 字节) +数据帧(64字节)。
- 通过正确配置帧信息(第一个字节的数据),可以灵活地发出标准帧、扩展帧甚至远程帧。通过正确解析串行帧可以得到标准帧、扩展帧甚至远程帧的细节。
- 注意:
- (1)该转换模式下,配置软件的“CAN ID”、“帧类型”均无效,因为此时发送的帧 ID 由上述串行帧中的帧 ID 数据填充,帧类型由串行帧中的帧信息来决定。
- (2)该模式下,必须严格按照标准的串行数据格式才能转换成功。必须要确保帧信息无误,保留位要为零。CAN 帧固定长度为 13字节,CANFD 帧固定长度为 69 字节,不足必须补 0,否则不能传输。
标准CAN帧格式

帧信息:长度1字节,用于标识帧信息:帧类型、帧长度。
FF: 标准帧和扩展帧的标识位, 1 为扩展帧, 0 为标准帧。
RTR: 远程帧和数据帧的标识位, 1 为远程帧, 0 为数据帧,CANFD模式时只能为0。
EDL: CAN和CANFD标识,0为CAN,1为CANFD。
BRS:波特率切换使能标识,0 为不转换速率,1 为转换可变速率,仅 CANFD 时有效。CAN 时此位应该为 0。
DLC3~DLC0: 数据长度位,标识该CAN(FD)帧的数据长度。
帧ID:长度4字节;高位在前,低位在后。标准帧有效位是 11 位,扩展帧有效位是 29 位。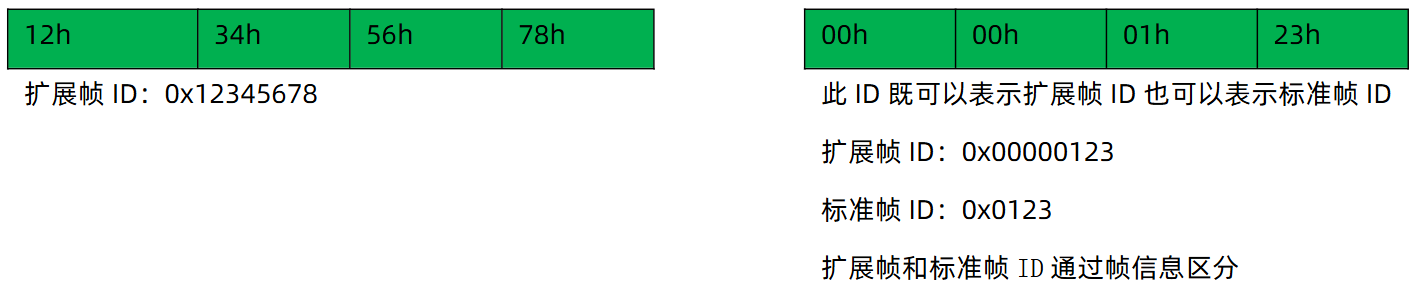
帧数据:CAN模式长度8字节,CANFD模式长度64字节,不足必须补00。
转换示例
串口: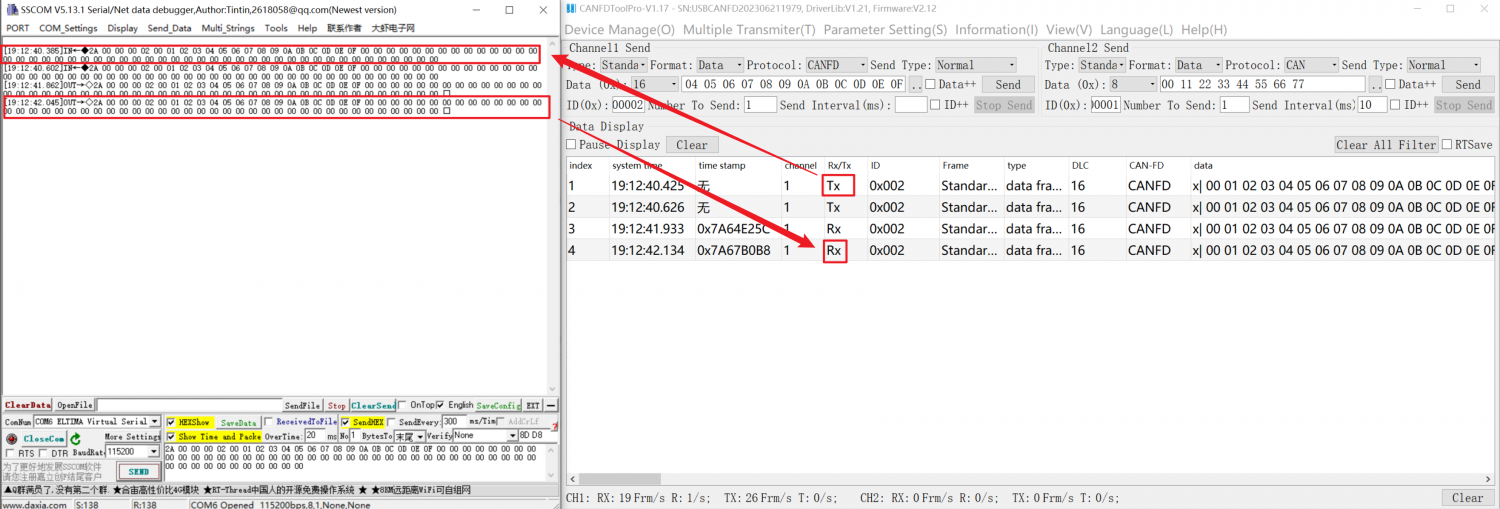
Modbus 协议转换
Modbus 协议转换可以将标准的 Modbus 数据协议转换成特定的 CAN(FD)数据格式,此种转换一般要求 CAN(FD)总线设备报文可编辑。
在 CAN 侧,制定了一个简单易用的分段通讯格式来实现 Modbus 的通讯。转换器在其中扮演的角色仍然是协议验证和转发。支持 Modbus 协议的传输,而不是 Modbus 的主机或者从机,用户按照 Modbus 协议通讯即可。
注意:
(1)在该转换模式下,配置软件的“CAN 参数”项的“CAN ID”无效,因为此时发送的帧 ID 由 Modbus RTU 串行帧中的地址域填充。
帧格式
modbus帧格式:
串口:Modbus RTU协议,所以用户帧符合此协议即可。
CAN帧:
CAN 侧设计了一套分段协议格式,其定义了一个分段以及重组的方法,如下所示。其中,CAN 帧信息(远程帧或数据帧;标准帧或扩展帧)通过配置软件设置。
CAN模式下,传输的 Modbus 协议内容即可从“数据2”字节开始,如果协议内容大于7个字节,那么将剩下的协议内容照这种分段格式继续转换,直到转换完成。
CANFD模式下,传输的 Modbus 协议内容即可从“数据2”字节开始,如果协议内容大于63个字节,那么将剩下的协议内容照这种分段格式继续转换,直到转换完成。
数据 1 是分段控制信息(占 1 个字节,8 Bit),其含义如下:
- 分段标记:占 1 个 bit 位 (Bit7),标志该报文是否是分段报文。该位为 0 表示单独报文,为 1 表示属于被分段报文中的一帧。
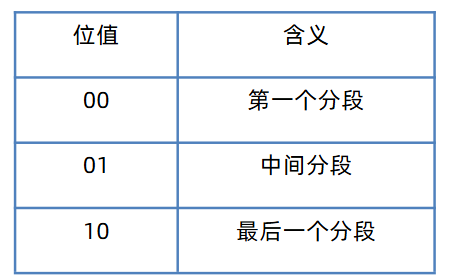
- 分段类型:占 2 个 bit 位(Bit6,Bit5),用于表示该报文在分段报文中的类型:
- 分段计数器:占 5 个 bit 位(Bit4~Bit0),表示该段在该段在整个报文中的序号。如果是第几个段,那么计数器的值就是几。这样在接收时就能够验证是否有分段被遗失。
Modbus RTU 转CAN(FD)
Modbus 协议的地址域转换成 CAN 报文中帧 ID 的 ID4(扩展帧)或 ID2(标准帧),在转换该帧的过程中标识不变。
CRC 校验字节不转换到 CAN 报文中, CAN 的报文中也不必带有串行帧的校验字节,因为 CAN 总线本身就有较好的校验机制。
转换的是 Modbus 的协议内容——功能码和数据域,转换时将它们依次转换在 CAN 报文帧的数据域(从第二个数据字节开始,第一个数据字节为分段协议使用)里。 由于 Modbus 帧的长度根据功能码的不同而不同,而 CAN 报文一帧只能传送 7 个数据,CANFD 报文一帧只能传送 63 个数据。 所以转换器会将较长的 Modbus 帧分段转换成 CAN 的报文后,用上述的 CAN 分段协议发出。用户在 CAN的节点上接收时取功能码和数据域处理即可。
CAN(FD)转Modbus RTU
对于 CAN 总线的 Modbus 协议数据,无需做循环冗余校验(CRC16),转换器按照分段协议接收,接收完一帧解析后自动加上循环冗余校验(CRC16),转换成 Modbus 帧发送至串行总线。
注意:如果接收到的数据不符合分段协议,则将该组数据丢弃不予转换。
CAN: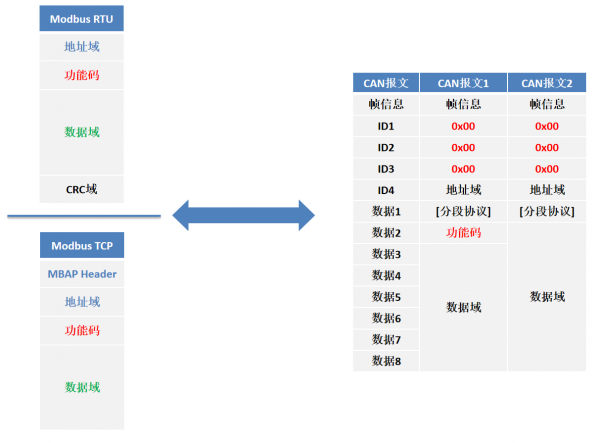
CAN FD: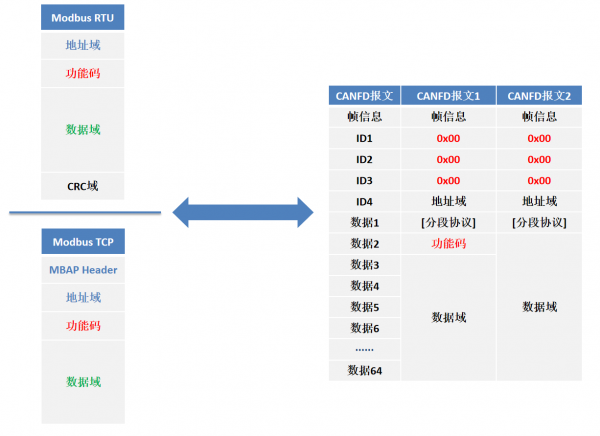
转换示例
串口: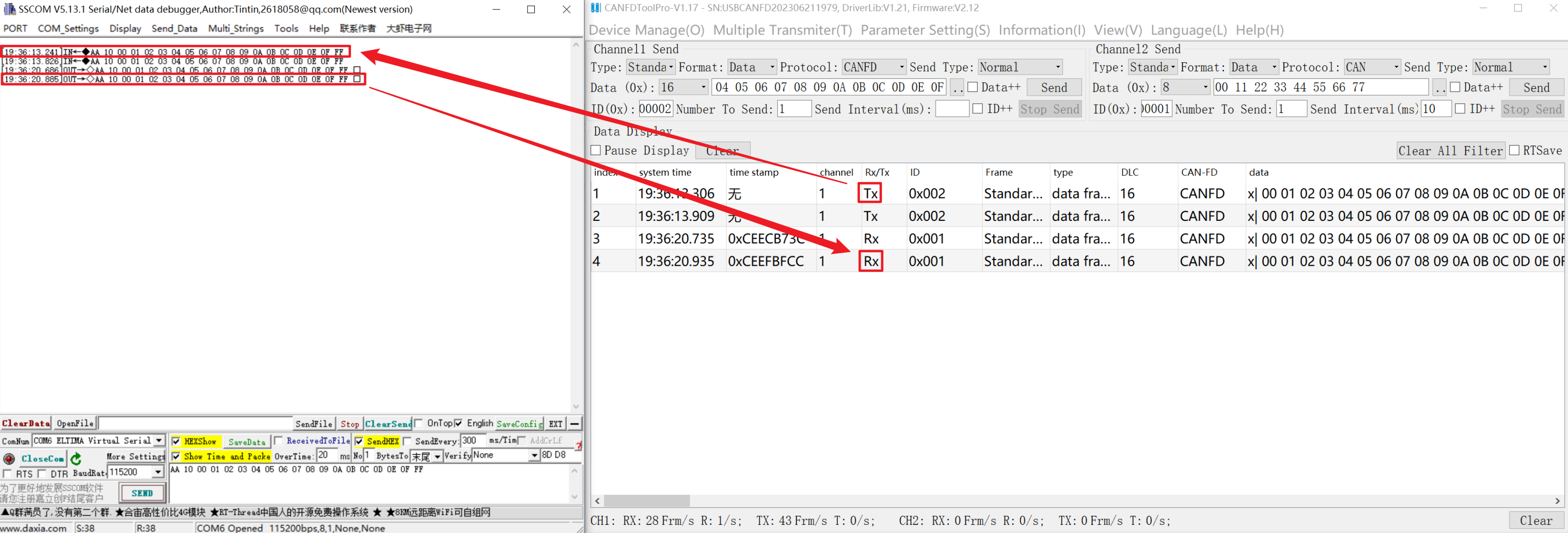
自定义帧头帧尾转换
为了让用户方便使用 CAN-bus,将串行帧格式向 CAN 帧格式靠拢,在串行帧中规定了一帧的起始及结束,即“帧头”和“帧尾”,用户可自行配置。
串口转CAN(FD)
串行帧格式必须符合规定的帧格式,否则不能正确传输。串行帧必须包含:帧头、数据长度、数据域、帧尾。帧头帧尾由客户自定义,1字节。
数据长度指数据域的字节长度。数据长度和帧尾数据必须匹配,才能正确传输,否则丢弃。例如:帧头配置为AA,帧尾配置FF。串行帧 AA03010204FF,则可正常传输。如果串行帧发送 AA0301020304FF,数据域 010203后为04而非帧尾FF,则丢弃该帧,不能传输。
如同透明转换,自定义协议转换中,CANID和CAN类型需要自行配置。帧头、帧尾、数据长度不转换到CAN帧中。
CAN: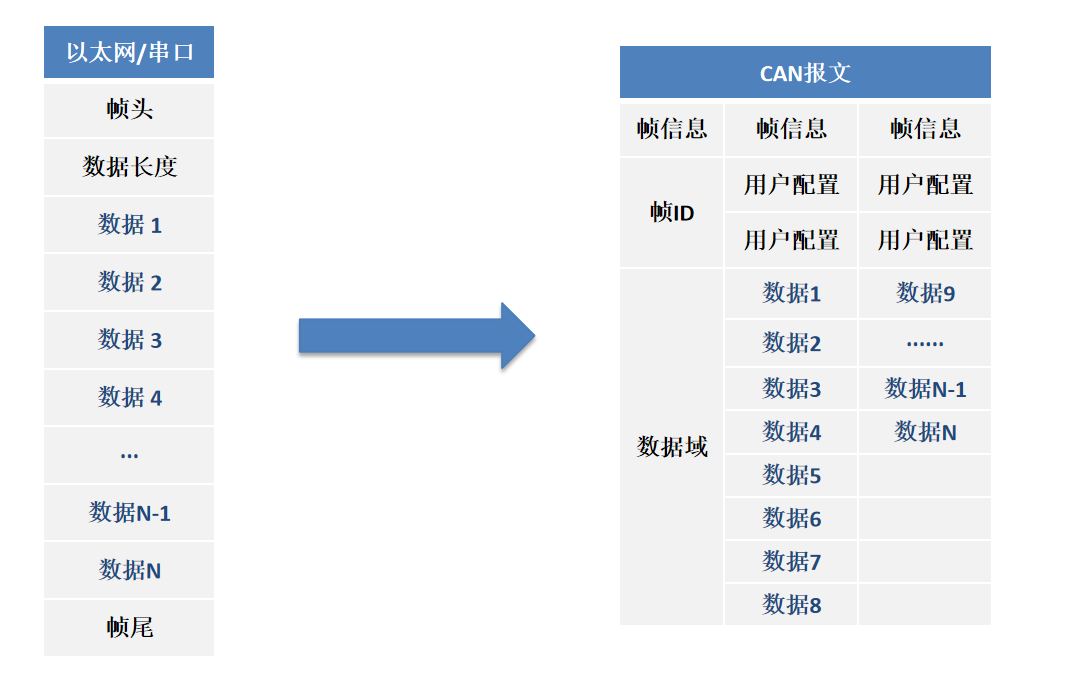
CAN FD: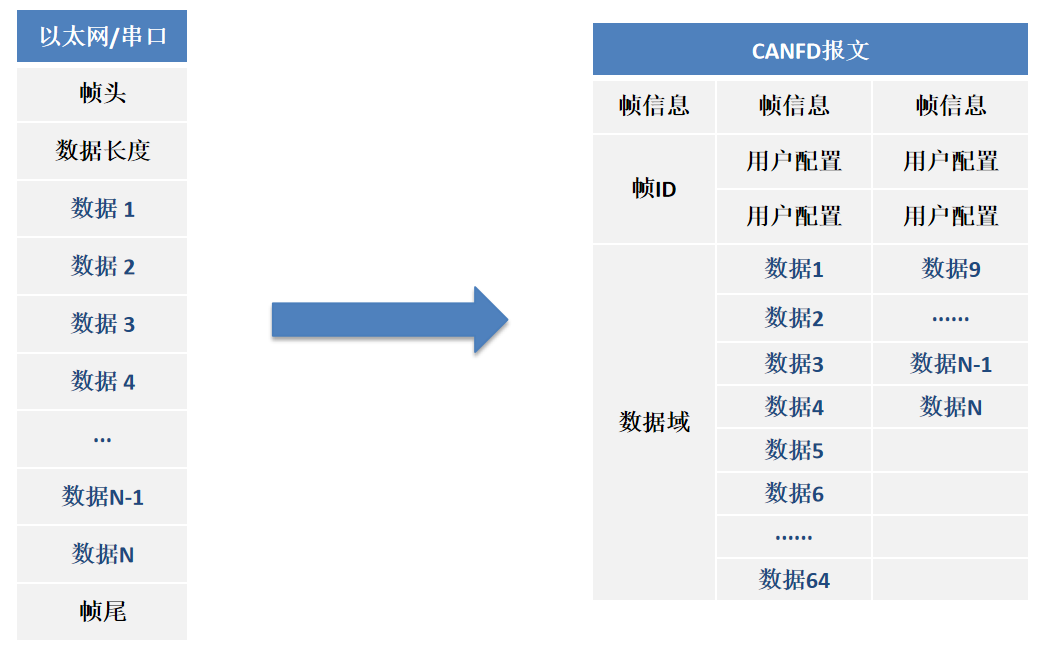
串口转CAN(FD)
CAN(FD)总线报文收到一帧即转发一帧,模块会将CAN报文数据域中的数据依次转换,同时会自动向串行帧添加帧头、帧长度、帧信息等数据,实际为串行帧转CAN报文的逆向形式。
CAN: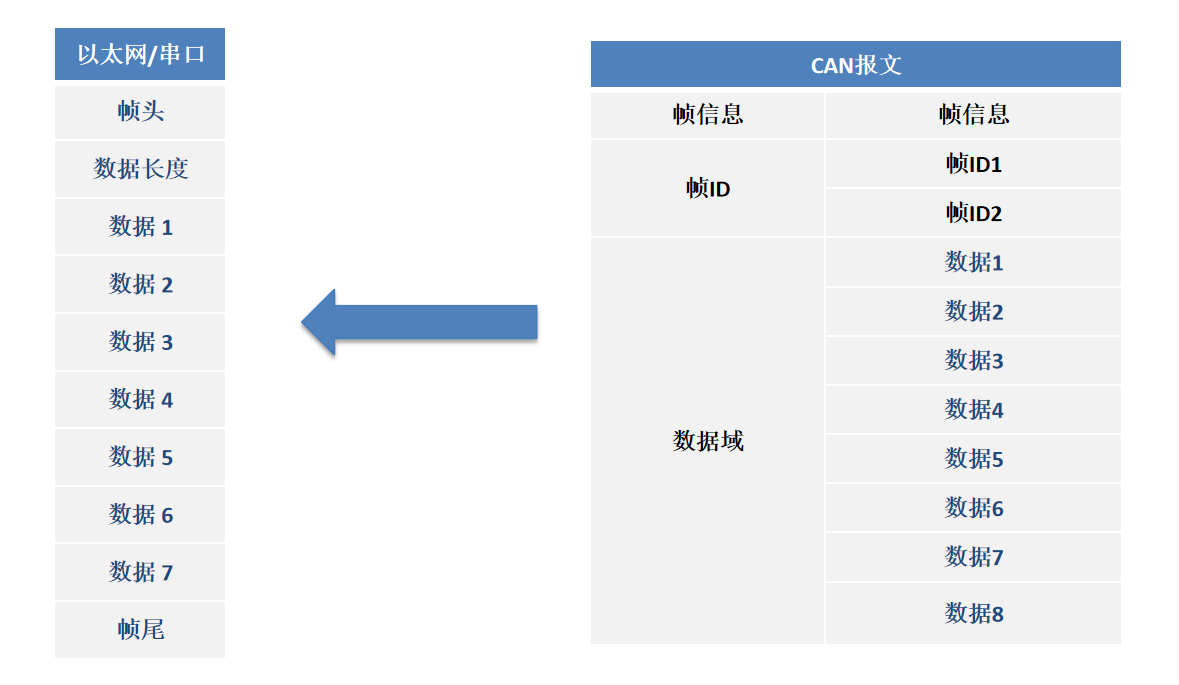
CAN FD: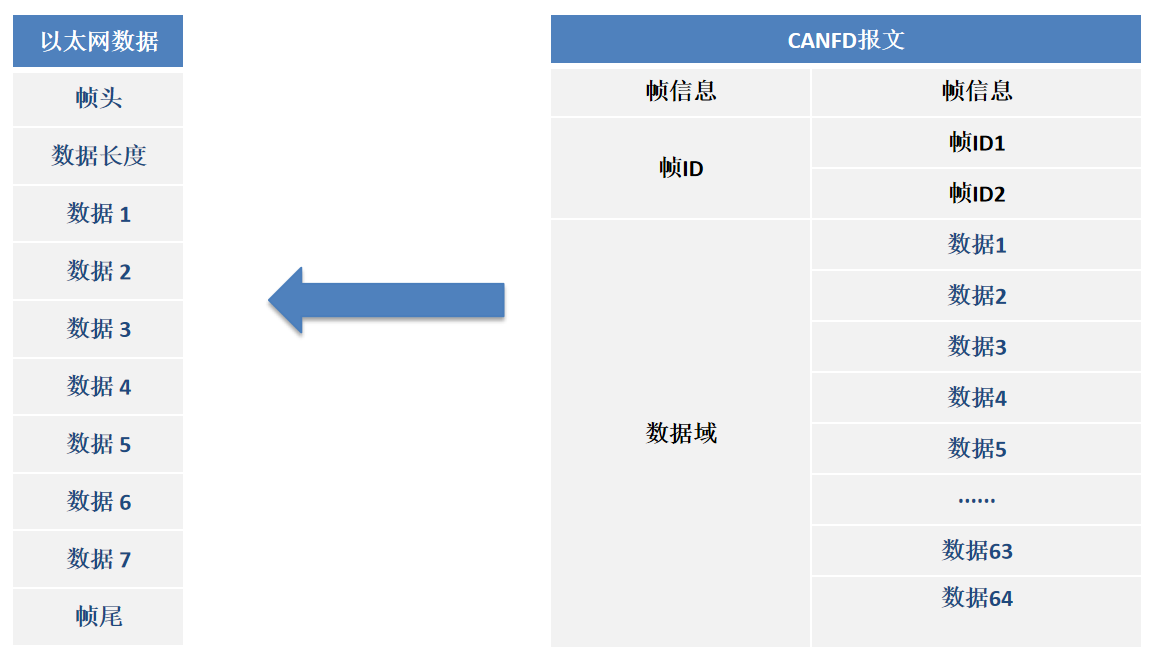
转换示例
串口:
资料
软件
FAQ
问题: 配置完设备之后,can端发送信息,设备无响应,串口端发送信息后,设备直接回复err -1 (ascii码),要怎么处理?
这种情况一般是配置完设备后没有退出配置状态,需要使用配置软件退出配置模式
问题: 配置无法保存要怎么处理?
检查一下配置项是否漏填
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841

