- 首页
- >
- 文章中心
- >
- Jetson系列
- >
- Jetson扩展模块
MAX9296-GMSL-DESER-MODULE 使用教程
产品说明
这是一个 GMSL 相机扩展板,支持同时接入两路 GMSL 摄像头到 树莓派 5、Jetson Orin Nano/NX 主板。可以通过软件配置同时兼容 GMSL1 与 GMSL2 协议接口。采用 MAX9296A 芯片,专为需要高带宽、低延迟视频传输的应用而设计。该扩展板适用于自动驾驶、机器视觉、智能安防等领域。
GMSL(Gigabit Multimedia Serial Link)是一种高速串行传输技术,专为传输高带宽的多媒体数据而设计,具备长距离传输,低延迟,高抗干扰性,布线简单等优点。GMSL 技术主要用于汽车电子和工业应用,能够通过单根电缆传输高清晰度的视频、音频和数据信号。通过使用同轴电缆或双绞线,GMSL 可以实现长距离的信号传输。
产品规格
| 解串器 | MAXIM(ADI) MAX9296A |
|---|---|
| 支持主控 | 树莓派 5、Jetson Orin NX/Nano 开发套件 |
| 支持串行器型号 | MAX9295, MAX96717, MAX96705 等 |
| GMSL输入 | 2 路 GMSL2 (兼容 GMSL1) 相机 |
| 输入接口 | 2 × MATE_AX FAKRA Z 连接器 |
| 输出接口 | 22Pin CSI 接口 |
| 支持GMSL相机型号 | ISX031 等 |
| 供电 | 5V 输入 |
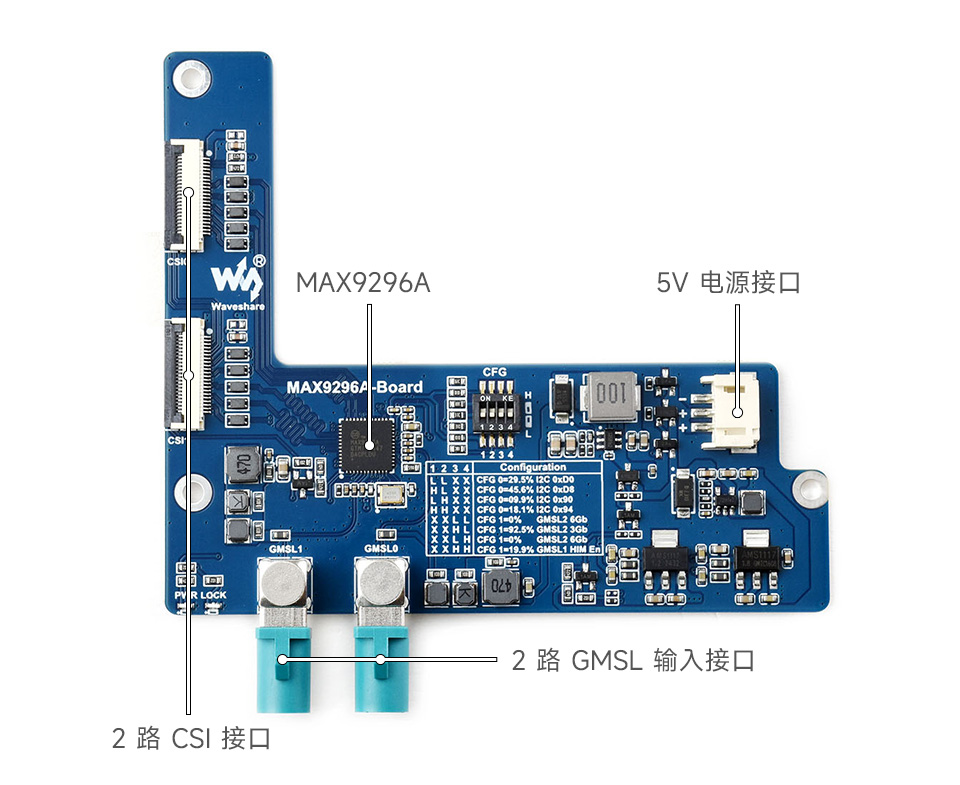
硬件规格
接口
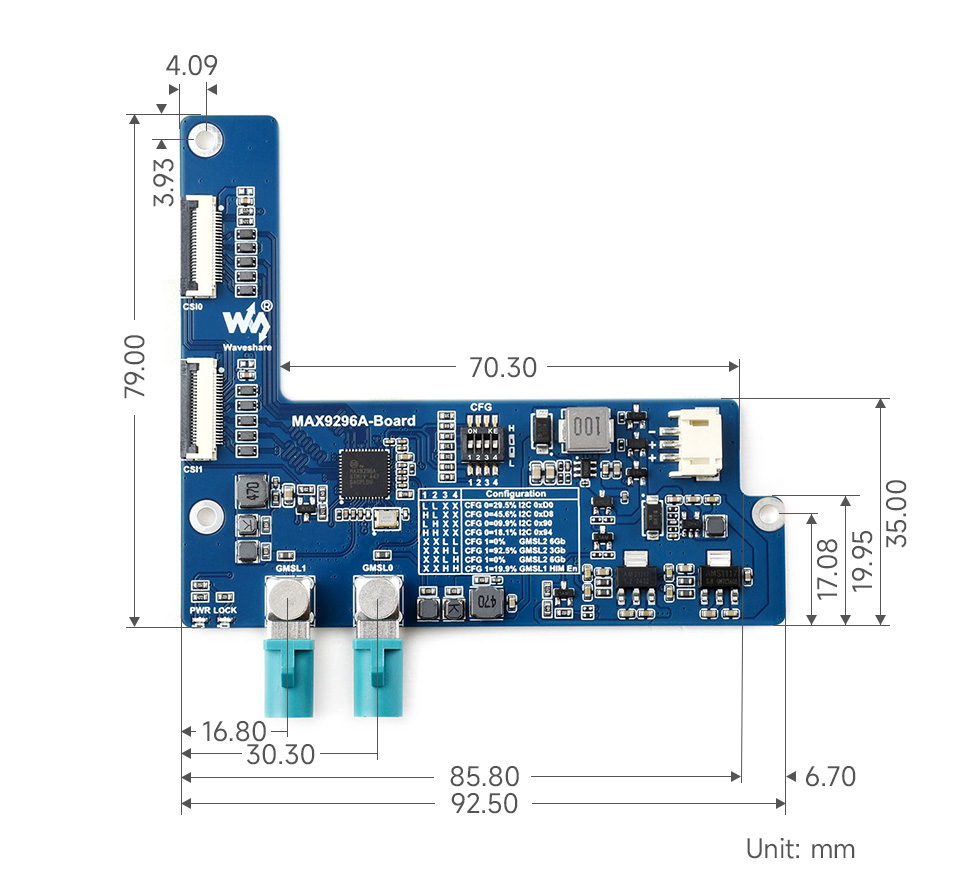
尺寸
使用说明 [ Jetson Orin Nano/NX ]
备注:目前提供的驱动仅支持 Jetpack5.1.2 (R34.5.1)版本镜像,支持 Jetson Orin Nano/NX,其他的摄像头型号或者需求,请联系技术支持了解
支持sensor型号
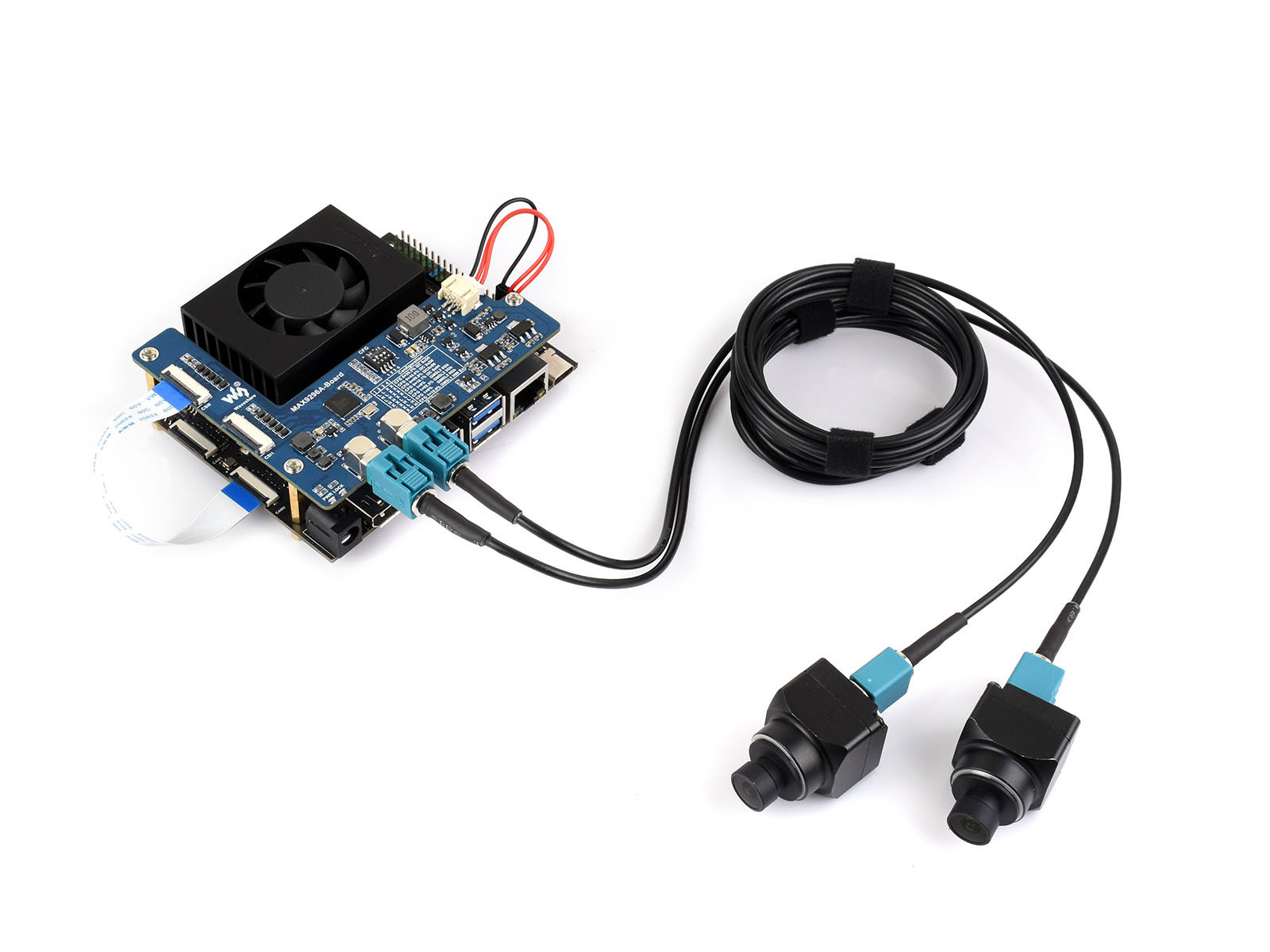
硬件连接
- 将解串板的 CSI0 接口用配送的排线连接到 Jetson Orin 主板的 Cam0 接口。
- NVIDIA Jetson® Orin™ Nano 套件的 CAM0 和 CAM1 的 CSI 定义顺序不同,目前主板只能接入 CAM0 接口 (具体可以查看相关 Pin 定义以及 Jetson® Orin™ 套件原理图的 CAM0/1 接口定义顺序)
- 22Pin FPC 无精确的阻抗控制,当使用高分辨率的相机时 CSI 速率较高,建议采用比较短的 FPC 线 (实测验证 8M 相机 2路同时接入时只能采用 5cm 长度的线材,1路接入可以采用 10/15cm 的线材)
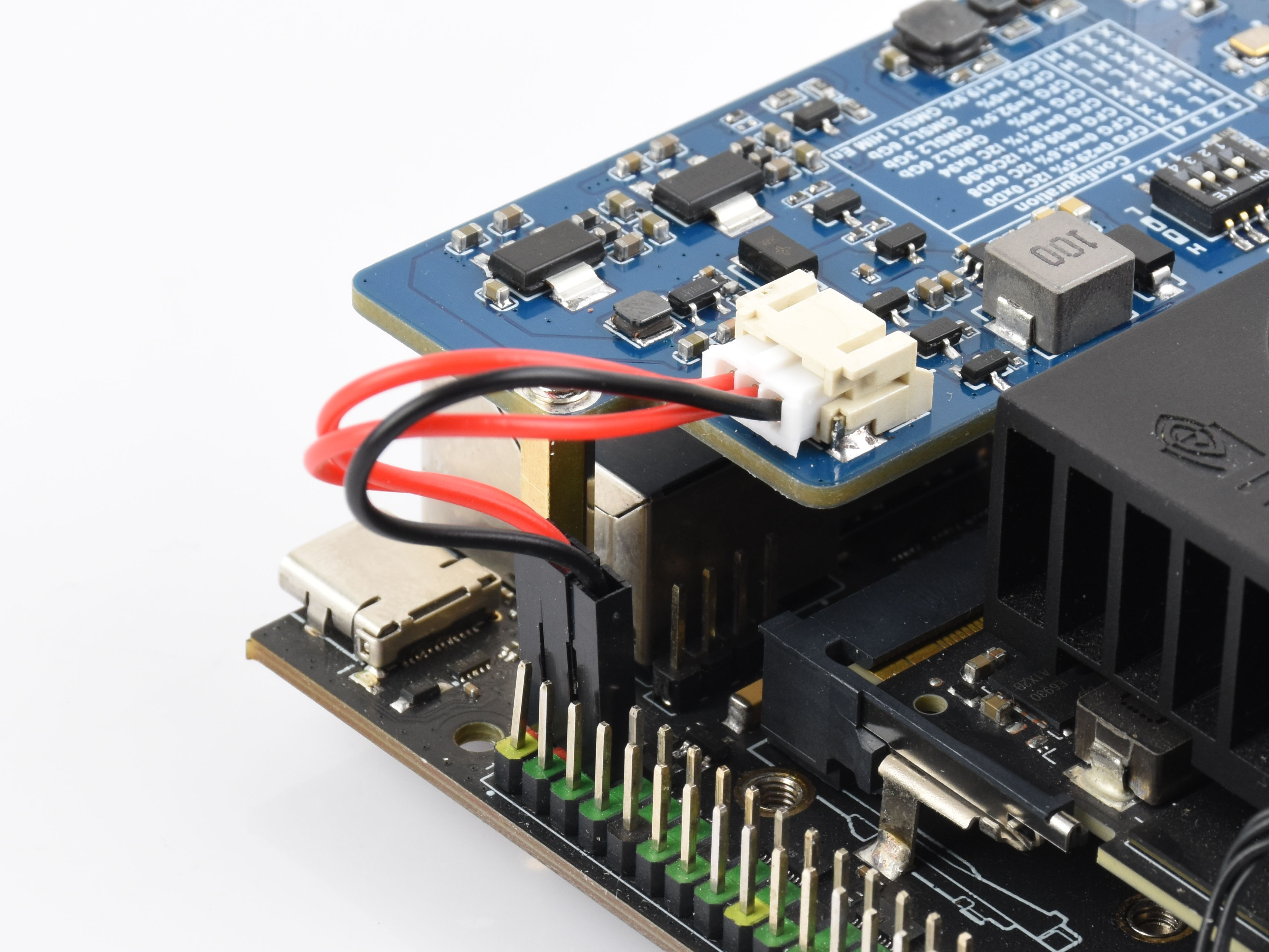
- 将电源线分别接入到解串板的电源接口和 Jetson Orin 主板 40PIN 中的 5V、GND 排针上。
- 将 GMSL 相机接入解码板的相机接口。
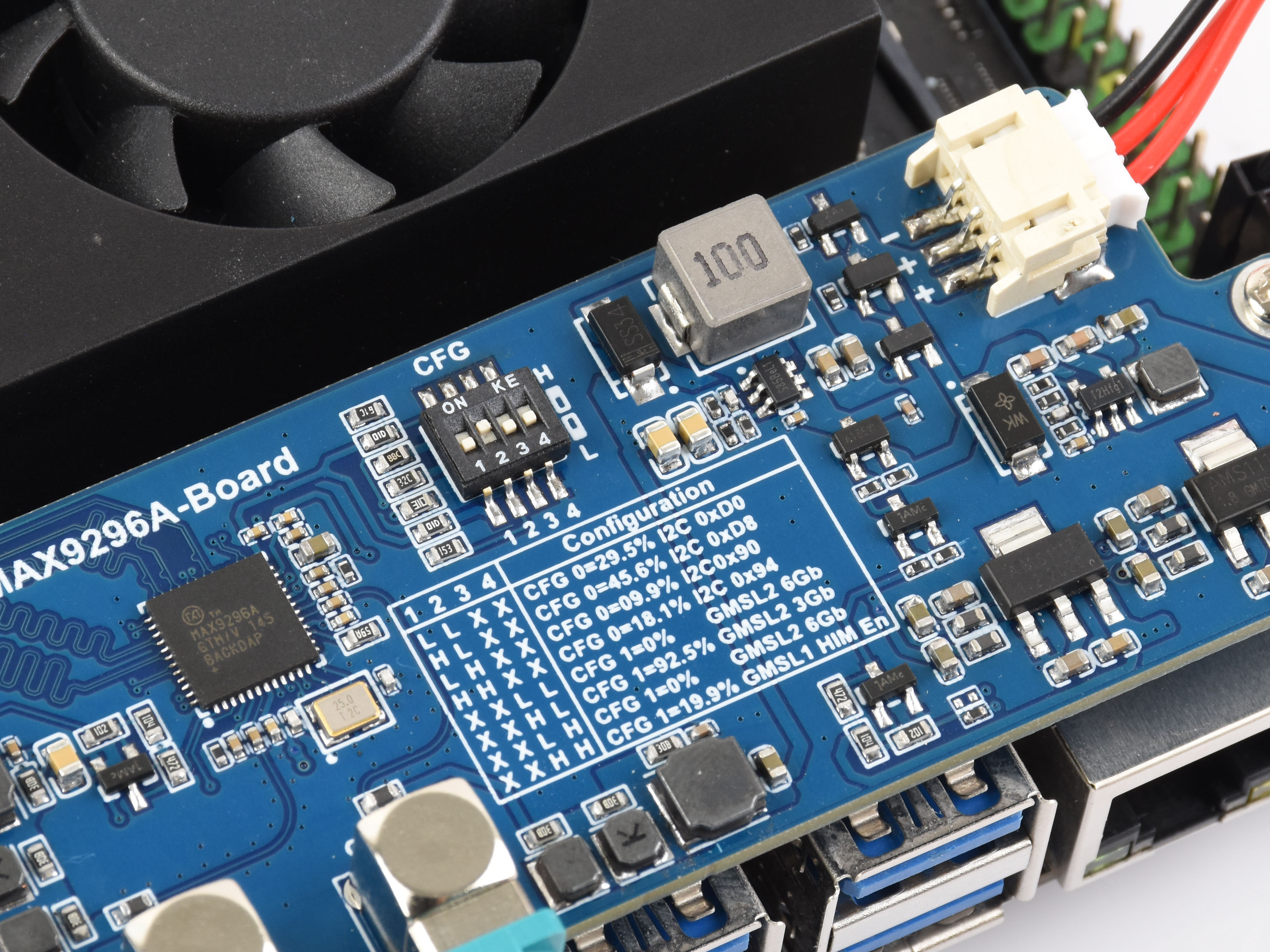
- 解串板拨码开关拨到 0100。
软件配置
- Jetson Orin 主板需要烧录相应支持的 Jetson 系统,具体烧录步骤可以参考相关主板的产品资料
- 可以用指令查看当前的系统版本
cat /etc/nv_tegra_release
- 例如这里查询到的镜像版本是 R35.4.1

- 上电主板后,打开 Terminal 终端,下载驱动并解压出驱动包
wget https://files.waveshare.com/wiki/MAX9296-GMSL-Camera-Board/MAX9296-GMSL-Camera-Board-Driver.zip unzip MAX9296-GMSL-Camera-Board-Driver.zip
- 用cd指令进入驱动包目录,并查看文件。
- 根据使用的相机型号进入对应目录,这里我们以 ISX031 为例
cd MAX9296-GMSL-Camera-Board-Driver ls cd ONXA_SY.ISX031Fx2_L4TR35.4.1 cd kernel
- 在内核文件中,dtb 文件夹包含了支持多个主板型号的设备树文件,这里我们需要用到符合当前主板型号的设备树文件
- 可以先用先用下方指令查看当前主板使用的设备树
sudo dmesg | grep kernel
- 比如,这里查询到的设备树文件是 tegra234-p3767-0004-p3768-0000-a0

- 将驱动中相同型号的 dtb 文件和 Image 文件复制到主板的 /boot 目录下
sudo cp dtb/tegra234-p3767-0004-p3768-0000-a0.dtb /boot sudo cp Image /boot
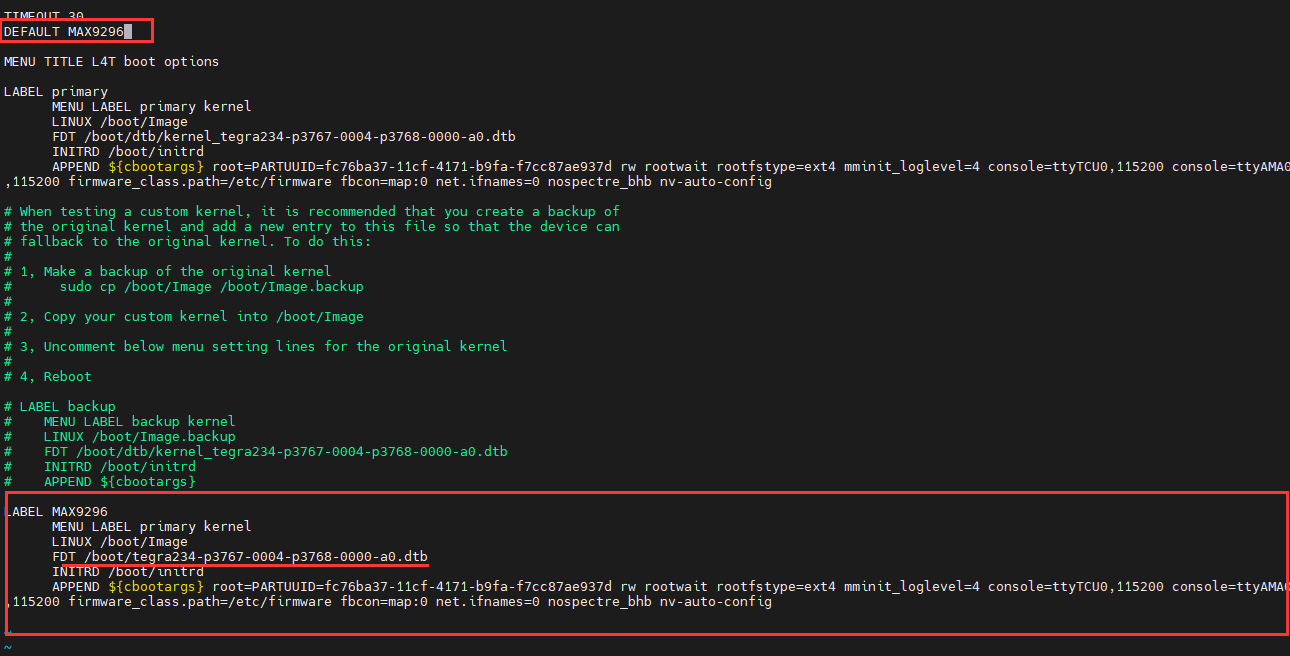
- 复制好文件后,修改 extlinux.conf 中启动的设备树文件
- 复制并添加多一个启动标签,将其中 FDT 的文件路径改成复制进去的文件目录,并将默认的启动标签改为新添加的
- 注意:这里修改需要特别注意检查无误后再保存重启系统,否则容易导致系统无法正常启动
sudo vi /boot/extlinux/extlinux.conf
- vi 编辑器中,按 i 进入编辑模式,按 esc 退出编辑模式。退出编辑模式后,可以输入 :wq! 保存文件并退出。
- 保存好文件后,重启系统
快速测试
- 检查摄像头是否有被正常识别
sudo dmesg | grep connected
- 如果有返回相关 /dev/video2 is connected 信息,表示摄像头有被正常识别
- 可以用以下指令对摄像头做预览测试。
- 预览测试需要连接 HDMI 或者 DP 屏幕,请确保屏幕已经正常连接并显示
- 注意将 video 设备号改成上一个步骤检测提示的设备号。
- 注意根据摄像头的支持分辨率修改指令测试
gst-launch-1.0 v4l2src device=/dev/video2 ! "video/x-raw, format=(string)UYVY, width=(int)1920, height=(int)1536" ! fpsdisplaysink video-sink=xvimagesink sync=false
产品资料
使用说明 [ 树莓派 5 ]
支持sensor型号
硬件连接
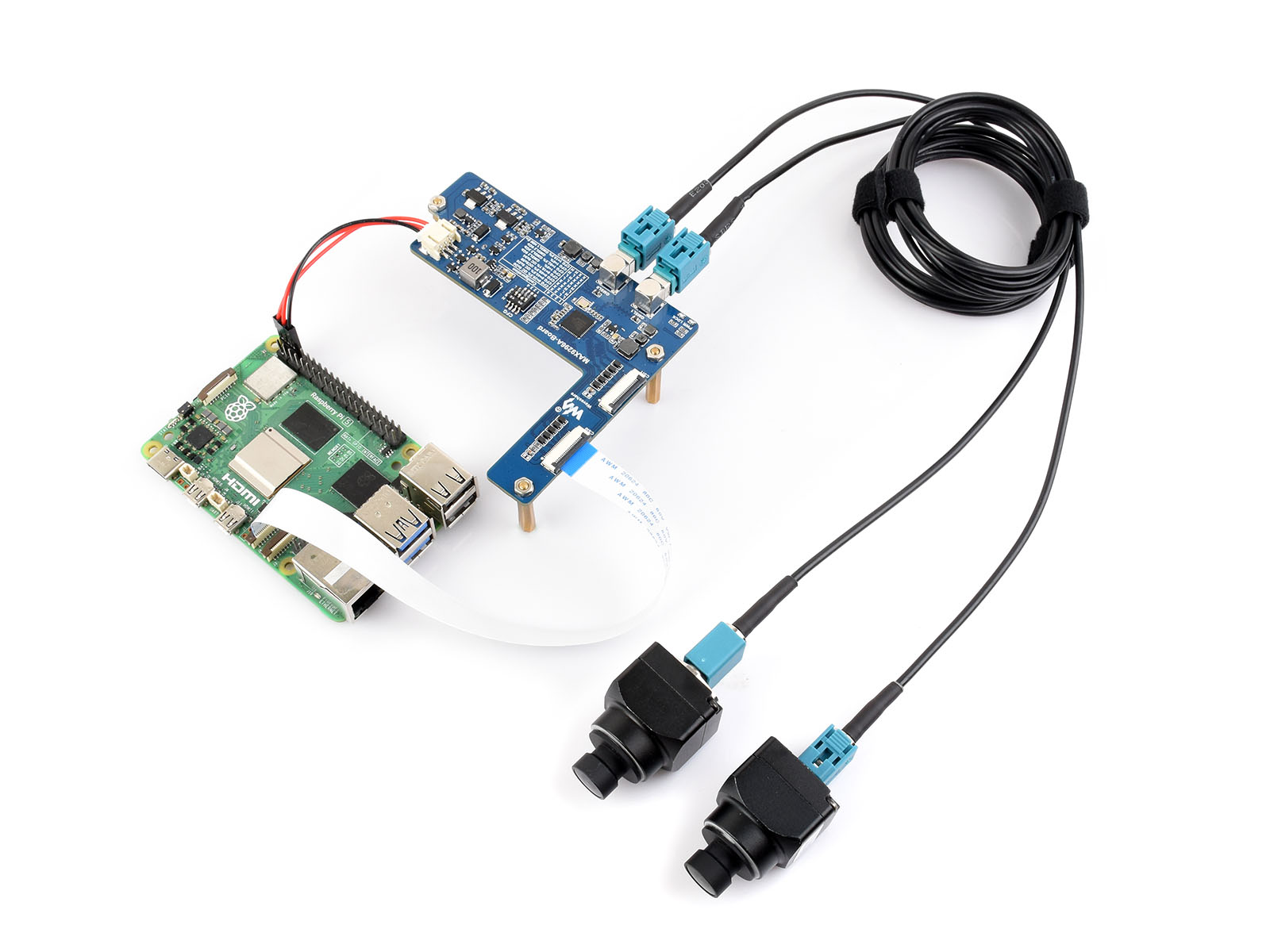
- 将解串板的 CSI0 接口用配送的排线连接到树莓派 5 的 CAM1 或 CAM0 接口。
- 将电源线分别接入到解串板的电源接口和树莓派 40PIN 中的 5V、GND 排针上。
- 将 GMSL 相机接入解码板的相机接口。
- 解串板拨码开关拨到 0100。
软件配置
- 测试使用的官方镜像:
2025-05-13-raspios-bookworm-arm64.img.xz
- 安装 GStreamer 工具:
sudo apt update sudo apt install gstreamer1.0-tools
- 打开 Terminal 终端,下载驱动并解压出驱动包:
wget https://files.waveshare.com/wiki/MAX9296-GMSL-DESER-MODULE/ws-rpi5-gmsl.zip unzip ws-rpi5-gmsl.zip
- 用 cd 指令进入驱动包目录:
cd ws-rpi5-gmsl/
- 为安装脚本添加可执行权限并执行:
chmod a+x rpi5_gmsl_driver_install.sh ./rpi5_gmsl_driver_install.sh
- 配置 config.txt 文件:
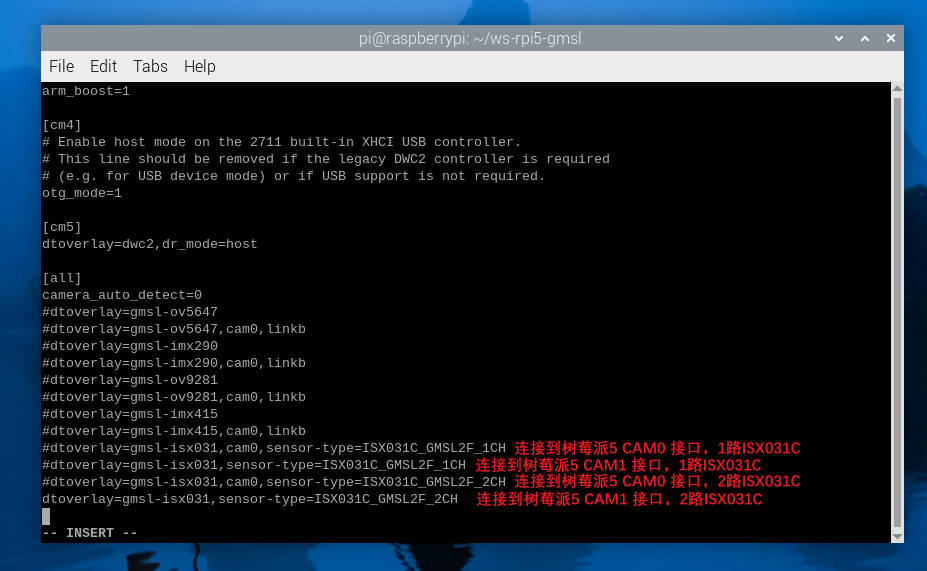
- 编辑文件,添加 dtoverlay
sudo vi /boot/firmware/config.txt
- 连接 1 路 ISX031C (无论是链路 A 还是链路 B,自动检测):
dtoverlay=gmsl-isx031,sensor-type=ISX031C_GMSL2F_1CH
- 连接 2 路 ISX031C:
dtoverlay=gmsl-isx031,sensor-type=ISX031C_GMSL2F_2CH
- 如果使用 CAM0 接口,添加 cam0 参数:
dtoverlay=gmsl-isx031,sensor-type=ISX031C_GMSL2F_1CH,cam0 dtoverlay=gmsl-isx031,sensor-type=ISX031C_GMSL2F_2CH,cam0
- 重启系统
快速测试
- 可以用以下指令对摄像头做预览测试
- 连接到树莓派 CAM1, 2 路 ISX031C:
ws_camera_preview.sh csi1 2ch
- 连接到树莓派 CAM1, 1 路 ISX031C:
ws_camera_preview.sh csi1 1ch
- 连接到树莓派 CAM0, 2 路 ISX031C:
ws_camera_preview.sh csi0 2ch
- 连接到树莓派 CAM0, 1 路 ISX031C:
ws_camera_preview.sh csi0 1ch
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841