Camera Module 3 Sensor Assembly 使用教程
说明
参数
- 传感器:索尼 IMX708
- 分辨率:1190万像素
- 水平/垂直:4608 × 2592像素
- 传感器尺寸:7.4mm 对角线
- 像素尺寸:1.4μm×1.4μm
- 标准型号中集成了红外截止滤光片,NoIR 型号中不存在
- 相位检测自动对焦
- 工作温度:0°C 至 50°C
模块对比
| 标准版 (Standard) | 夜视版 (Standard NoIR) | 广角版 (Wide) | 广角夜视版 (Wide NoIR) | |
|---|---|---|---|---|
| 对焦范围 | 10 cm~∞ | 10 cm~∞ | 5 cm~∞ | 5 cm~∞ |
| 焦距 | 4.74 mm | 4.74 mm | 2.75 mm | 2.75 mm |
| 对角视角 | 75° | 75° | 120° | 120° |
| 水平视角 | 66° | 66° | 102° | 102° |
| 垂直视角 | 41° | 41° | 67° | 67° |
| 光圈值(F-stop) | F1.8 | F1.8 | F2.2 | F2.2 |
| 红外感应 | 否 | 是 | 否 | 是 |
树莓派使用方法
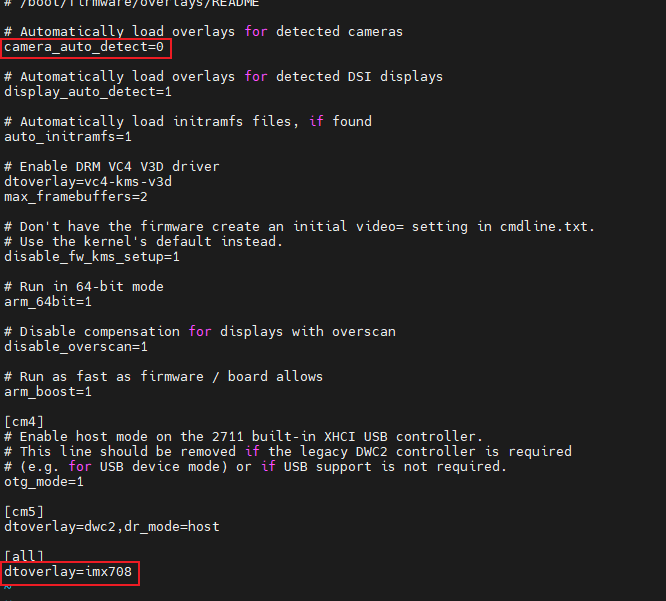
编辑文件配置文件
sudo vi /boot/firmware/config.txt
- 将 camera_auto_detect=1 语句改为 camera_auto_detect=0
- 在行末添加语句 dtoverlay=imx708 保存,重启
查看当前摄像头设备
rpicam-hello --list-camera
可以看到摄像头型号与分辨率
Available cameras
-----------------
0 : imx708 [4608x2592 10-bit RGGB] (/base/axi/pcie@1000120000/rp1/i2c@80000/imx708@1a)
Modes: 'SRGGB10_CSI2P' : 1536x864 [120.13 fps - (768, 432)/3072x1728 crop]
2304x1296 [56.03 fps - (0, 0)/4608x2592 crop]
4608x2592 [14.35 fps - (0, 0)/4608x2592 crop]
摄像头预览
- 注意:测试画面是输出到HDMI屏幕的,所以测试的时候要先连接屏幕到树莓派
rpicam-hello -t 0
连续自动对焦并预览
rpicam-hello --autofocus-mode continuous -t 0