

RP2350B-MINI-A 使用教程
【硬件资料】
】硬件资料
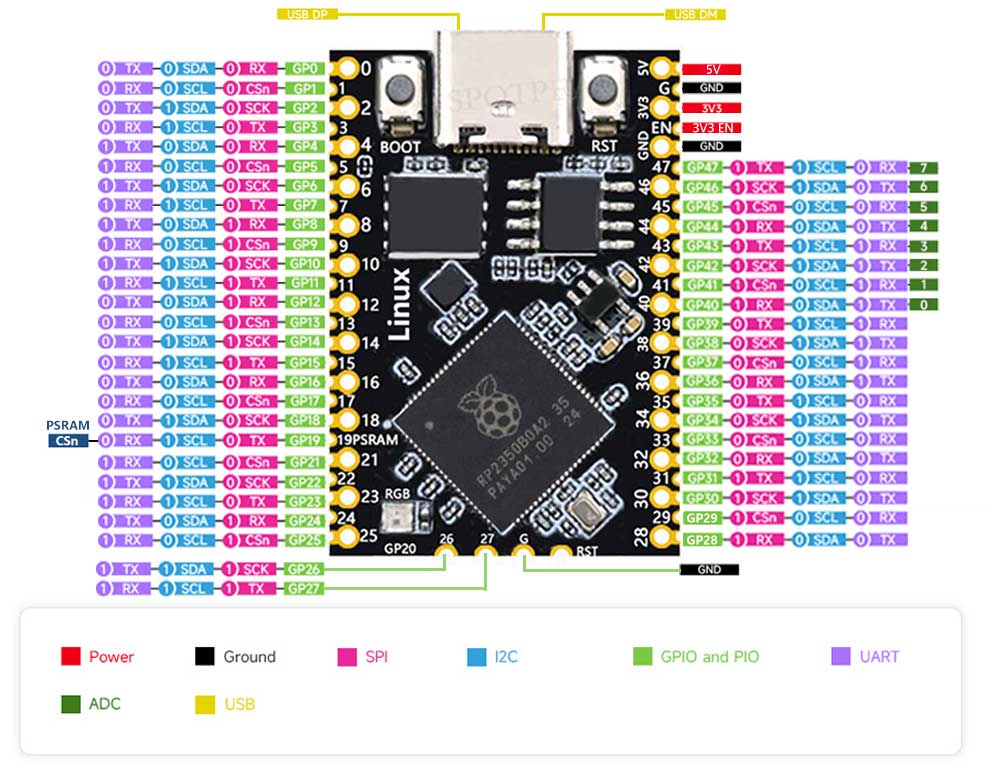
】管脚定义
【示例代码】
【如何运行示例代码】
】运行Python
1】按boot进入固件跟新模式,电脑会出现一个U盘
2】放firmware.uf2到新出现的U盘,放入之后U盘自动消失
3】之后可以使用Thonny软件运行.py程序
】烧录和运行Linux镜像
先长按住Pico 开发板上的 BOOTSEL 按钮(一直按住不松),在将 Pico 用USB线 插入到电脑的USB接口,最后松开 BOOTSEL 按钮。 这时电脑上会出现个磁盘名为:RPI-RP2 类似插入U盘的效果。
在你电脑ubuntu linux系统安装picotool
然后在linux的终端使用picotool烧录固件。
psram-bootloader.uf2是类似BIOS / 引导加载器,先使用以下命令刷 uf2文件
sudo picotool load -fu psram-bootloader.uf2
再使用以下命令刷入Linux 系统镜像:
sudo picotool load -fxup 0 flash-image.bin
使用USB转串口工具,UART-RX接pico2的GPIO0,UART-TX引脚接pico2的GPIO1。
打开串口终端能够进入linux终端即可(此系统为linux最小系统裁剪版本buildroot,内核是6.10)
【编译Linux源码】
】克隆项目到本地
git clone https://github.com/Mr-Bossman/pi-pico2-linux
】始化并更新 pico-sdk内部的子模块
git submodule update --init
】配置系统
make -C buildroot BR2_EXTERNAL=$PWD/ raspberrypi-pico2_defconfig
】编译系统
make -C buildroot
】烧录内核
make -C psram-bootloader flash-kernel
(flash-kernel :是该目录Makefile中定义的一个目标任务,其内部包含了具体的烧录命令)
】验证系统
使用USB转串口工具,UART-RX接pico2的GPIO0,UART-TX引脚接pico2的GPIO1。
打开串口终端能够进入linux终端即可。
注意:烧写Linux系统之后,如果想要使用 micropython 需先执行以下命令擦除之后才能正常使用micropython
sudo picotool erase
否则无法刷入其他uf2文件
