

WP5320 使用教程
产品说明
产品介绍
WP5320 是一款高性能 PWM 控制数字舵机,紧凑的外观,可靠耐用。该舵机具有快速的响应速度和高扭矩输出,堵转扭矩可达到 20kg.cm。在控制方面,舵机采用脉宽调制的控制信号,可以实现 180°角度控制范围。其内部控制系统采用数字比较器架构,确保精准的角度控制和稳定性能。同时,舵机还配备了电子保护功能,能在堵转时自动输出保护扭矩,有效保护舵机和系统的安全运行。WP5320 适用于对性能和耐久性要求较高的机器人、机械臂、RC 车、遥控工程模型等应用场景。
产品特性
- 高扭矩输出:7.4V 工作电压的情况下,堵转扭矩可达到 20kg.cm
- 铜铝齿轮,双滚珠轴承:采用铜齿与铝齿组合,齿轮轴加粗至 2.0。优化中心距,双滚珠轴承设计,寿命更长。
- 数字比较器:具备数字比较器控制系统,实现精准角度控制和定位,确保运动准确稳定。
- 灵活性高:180°旋转角度和可调节的控制参数,适应各种需求。
产品参数
| WP5320 相关参数 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 电气参数 | 工作电压范围 | 4V-8.4V | 机械规格 | 外观尺寸 | 55*20*43mm | |||
| 空载速度 | 0.151sec/60°(66RPM)@7.4V | 机构极限角度 | 无限制 | |||||
| 空载电流 | 120mA@7.4V | 轴承类型 | 滚珠轴承 | |||||
| 堵转扭矩 | 20kg.cm@7.4V | 重量 | 67±1g | |||||
| 堵转电流 | 3A@7.4V | 出力轴 | 25T/5.9mm | |||||
| 静态电流 | 6mA@7.4V | 减速比 | 1/275 | |||||
| 额定负载 | 6.5kg.cm@7.4V | 齿轮虚位 | ≤0.5° | |||||
| 额定电流 | 1000mA@7.4V | 摇臂虚位 | 0° | |||||
| Kt 常数 | 6.5kg.cm/A | 角度传感器 | 碳膜电位器 | |||||
接口定义
| 名称 | 颜色 | 说明 |
|---|---|---|
| GND | 棕色 | 电源负极 |
| VCC | 红色 | 电源正极(4-8.4V) |
| Signal | 黄色 | PWM 控制信号输入 |
控制特性
- 控制信号:PWM
- 控制系统类型:数字比较器
- 操作角度:180°
- 两边角度差:≤5°
- 回中差:≤1°
- 中立位置:1500μsec
- 死区宽度:≤4μsec
- 脉波宽度范围:500→2500μsec
树莓派使用
您可以使用 Servo Driver HAT 这个舵机扩展板结合树莓派去驱动 WP5320 PWM 舵机。
电源说明
- 通过右边绿色端子 VIN 和 GND 接电池给舵机扩展板及舵机供电,该端子输入电压范围为 6~12V,输入的电压经过板载的 5V 稳压芯片输出 5V 电源给舵机供电,最大输出电流为 3A。
- 树莓派请使用独立供电,不要从舵机扩展板上反向给树莓派供电,这样的供电是不安全的。
硬件连接
根据下图 Servo Driver HAT 的 40PIN 接口定义如下: 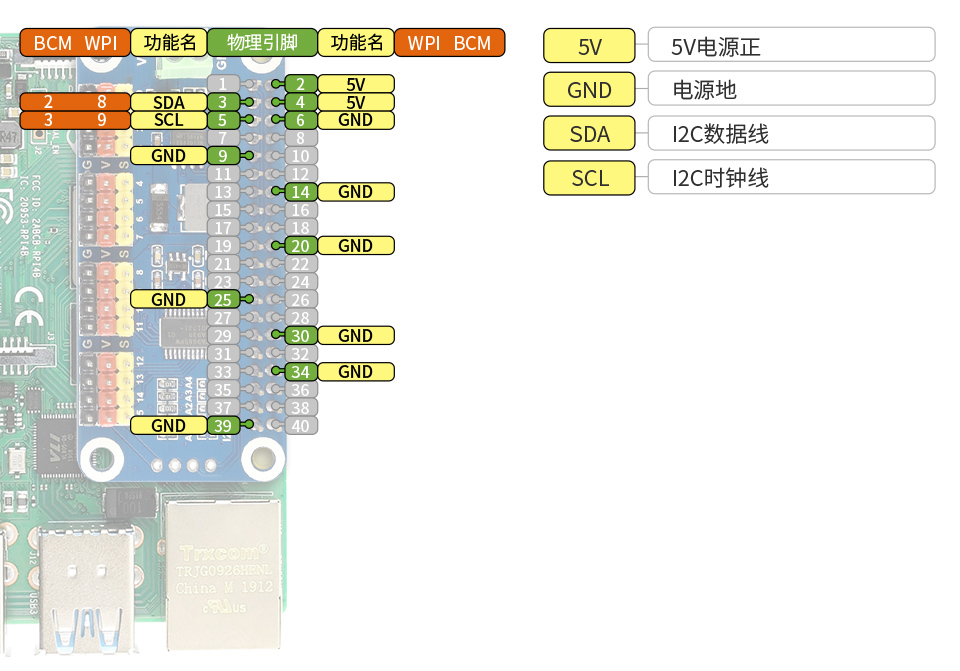
- Servo Driver HAT 与树莓派之间的连接
| 舵机扩展板引脚 | 树莓派引脚 | 说明 |
|---|---|---|
| VCC | 3.3V或5V | 扩展板供电(建议使用 3.3V) |
| GND | GND | 共地 |
| SDA | SDA(GPIO2) | I2C 数据线 |
| SCL | SCL(GPIO3) | I2C 时钟线 |
软件配置
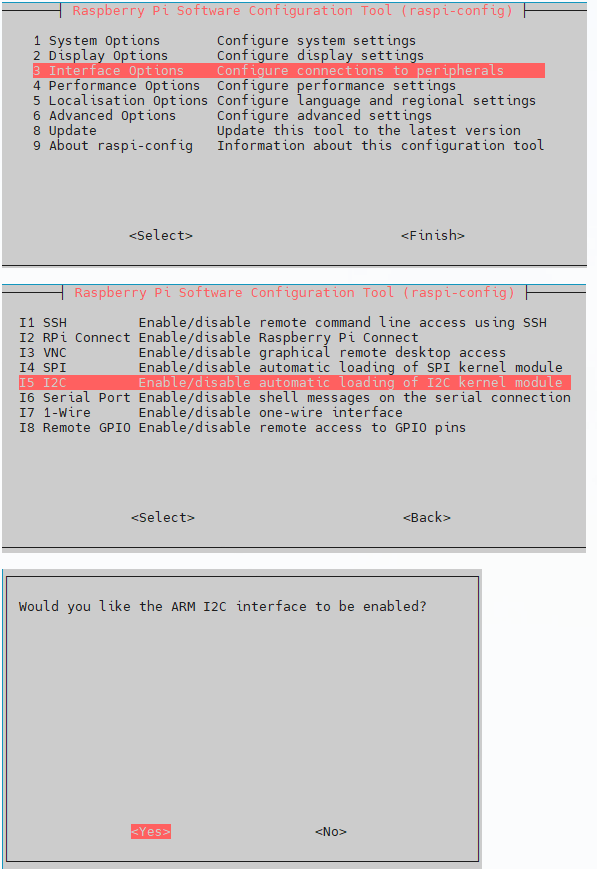
开启 I2C 接口
打开树莓派终端,输入以下指令进入配置界面:
sudo raspi-config
选择“Interface Options”->“I2C”->“yes”,启动 I2C 接口。
启动后,输入以下指令重启树莓派:
sudo reboot
Python 例程
1. 下载例程并解压
sudo apt-get install p7zip-full wget http://www.waveshare.net/w/upload/6/6c/Servo_Driver_HAT.7z 7zr x Servo_Driver_HAT.7z -r -o./Servo_Driver_HAT sudo chmod 777 -R Servo_Driver_HAT cd Servo_Driver_HAT/Raspberry\ Pi/
2. 运行测试例程
#如果你是python2 cd python/ sudo python PCA9685.py #如果你是python3 cd python3/ sudo python3 PCA9685.py
现象:将舵机接到 0 号通道,0 号通道的舵机从 0°旋转到 180°,接着又从 180°转动到 0°,重复循环转动。
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841

