

- 首页
- >
- 文章中心
- >
- micro:bit
- >
- micro:bit主板及套件
前言:Preface of KitiBot for Micro:bit
前言
我是专为Micro:bit而设计的入门级履带/轮式机器人,采用图形化编程软件,积木式拖拽搭建,让你轻松玩转智能机器人。我采用Micro:bit为主控板,配套有多款功能模块,可轻松实现循迹、避障、超声波测距、舵机、蓝牙遥控等功能。KitiBot for micro:bit机器人包含轮式机器人和履带机器人两款机器人。这两款机器人采用相同的控制板,只是结构不一样
资源介绍
【Micro:bit 主控板】
Micro:bit是一款由英国广播公司(BBC)推出的,用于青少年编程教育的ARM开发板。板载多种功能模块,并引出扩展接口,可轻松胜任各种编程相关的教学与开发场景,包括编写电子游戏、智能机器人控制和科学实验等。
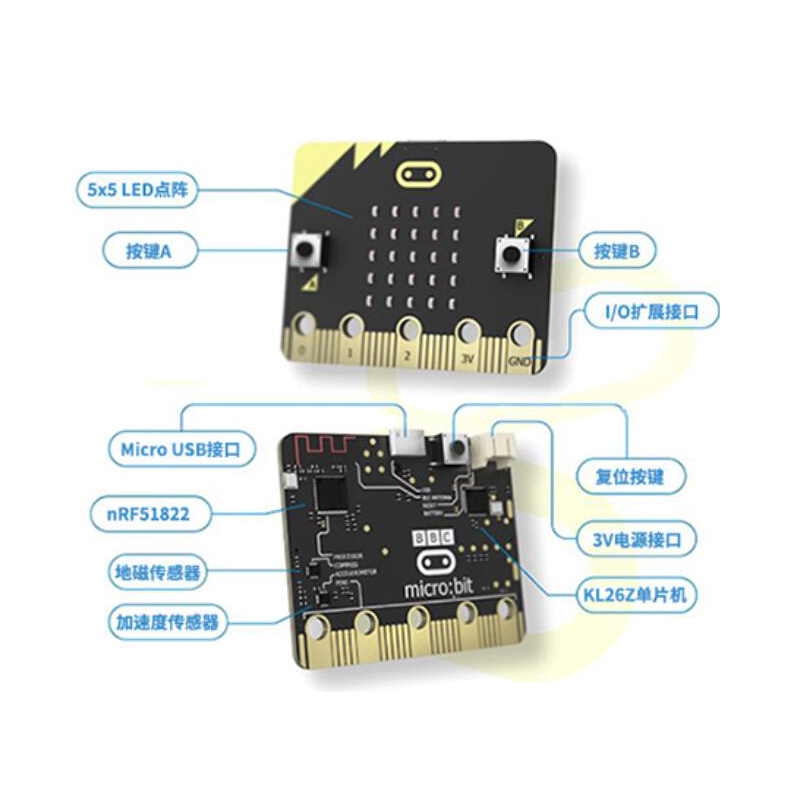
- nRF51822处理器
- 16 MHz 32位 ARM Cortex-M0内核
- 蓝牙4.0低功耗和2.4GHz RF无线
- 16kB RAM
- 256kB Flash
- KL26Z单片机
- 48 MHz ARM Cortex-M0+内核
- 128 KB Flash
- 地磁传感器 - MAG3110,I2C,获取三轴地磁数据
- 加速度传感器 - MMA8652,I2C,获取三轴加速度数据
- 3V电源接口
- 复位按键
- Micro USB接口 - 可接入电脑烧写/仿真,串口通信
- 5x5 LED点阵 - 可显示文字、图形等
- 按键A/B - 可编程按键
- I/O扩展接口 - 含SPI、UART、I2C、AD、PWM等接口
【说明】:不同的套餐,配件可能是不同的。虽然本手册将介绍所有配件,但是您购买的套餐可能并不包含其中的某些配件。
用户可以通过微雪百科获取 KitiBot for micro:bit 的详细资料,包括用户手册、原理 图、示例程序、数据手册等资源。
➢ 资料路径:www.waveshare.net/wiki/KitiBot_for_micro:bit
【作者有话说】:由于水平有限,时间仓促,教程中存在错误和不足之处再说难免,敬请读者批评、指 正。由于小车的电气特性所限,相对于其他的开发板,用户应当更加注意安全、正确地使用本产品,以避免小车底板对micro:bit造成不可逆的电器损坏。因此首次使用本产品的用户,应当尽量按照本手册的操作步骤进行操作
用户须知
- 初次拿到机器人时先检测配置清单是否齐全。在使用机器人前是需要先熟悉micro:bit如何使用。用户手册前面三章不需要用到机器人,是给小伙伴们熟悉如何写程序控制micro:bit。在熟悉如何是使用micro:bit后才将micro:bit组装到机器人上使用。
- 控制板上集成了充电放电电路,还有锂电池保护电路,可以避免锂电池因反接,过充电、过放电、电流过大、短路等原因导致电池损坏。电池第一次上电时由于保护电路的原因,电路不会进去正常模块,此时电池无法放电(供电)。需要快速拨动几次开关或者连接充电才可以进入正常模块进行放电(供电)。因此,如果发现安装电池或者更换电池后模块无法上电,可以快速拨动几下开关试一下。
- 驱动板上有四个LED指示灯,分别是WARNING,CHG,BOOT,PWR。
- WARNING:报警信号灯,当电池接反的时候这个指示灯会亮,此时需要将电池拔出来改变方向再安装。
- PWR:电源指示灯,正常供电时会亮。当打开开关此灯不亮时,可以快速拨动几次直到PWR灯亮正常供电。如果PWR灯一直不亮可能是电池没电了,接上usb线充电。
- BOOT:放电指示灯,当电池正常放电时,此灯会亮。在不充电的情况下,此灯不亮或者闪烁可能就是电池没电了。
- CHG:充电信号灯,当接上usb线充电时,此灯会亮,BOOT灯会熄灭。直到充满电时CHG会熄灭。
- Power USB口是充电接口,不能用来下载程序。当机器人长时间不用是需将开关拨到OFF的位置或者将电池拆下来避免电池损坏。
- micro:bit 的mirco usb 接上USB线之前必须要先开启电源开关,等电池正常供电后才能接usb线下载程序。不能只通过micro:bit的USB 接口给小车供电。此时PWR 电源指示灯只有微弱的光,表示小车在工作不正常的状态
- 插拔micro:bit时需要断电操作,避免带电拔插损坏micro:bit。另外需要注意micro:bit的方向。有LED点阵屏的一面朝外。
- 我们有提供用户手册所有章节中的示例程序,示例程序是使用微软开发的makecode编程环境,支持图形化编程和Javasript编程。程序是hex格式的,可以直接将程序复制到micro:bit中运行(将micro:bit接到电脑会出现一个u盘,将hex文件复制到u盘中即可下载),也可以将程序拖拽到makecode网页编程界面中打开编辑。可能示例程序更新会导致和手册上不一样,已示例程序为准。

{kind=link}