Bus-Servo-Driver-HAT-(A) 使用教程
产品说明
这是一款专为总线舵机设计的驱动板,集成 ESP32 和总线舵机控制电路,板载 RS485 和 TTL 总线舵机接口。我们开源了总线舵机控制例程和 JSON 通信接口,用户可以通过 USB 连接,使用上位机发送 JSON 格式的指令来控制总线舵机,并获取 JSON 格式的反馈(舵机的扭矩,转速,位置等信息)。
用户也可以对其进行二次开发,作为机器人项目的下位机来使用。
产品规格
- 主控模组:ESP32-WROOM-32
- 供电接口:XT60、5.5×2.5 mm DC
- 供电电压:9~25V(输入电压需与舵机电压匹配)
- 通信接口:UART、Type-C × 2
- 无线通信:2.4G WiFi
- 定位孔直径:3 mm
- 定位孔间距:58×49 mm
- PCB 尺寸:65×57 mm
产品特性
- 可同时控制多达 253 个 ST 和 RSBL 系列总线舵机(前提是供电充分)
- 宽电压输入 9~25V (输入电压需与舵机电压匹配)
- 基于 ESP32-WROOM-32 模组,支持多种有线和无线通信方式
- 提供多种控制例程,方便多种硬件控制
- 可通过 Type-C 接口与总线舵机直接通信
- 支持安装树莓派,集成 5V 降压稳压电路可为树莓派供电,通过 GPIO 串口进行通信,降低接线复杂度
开源项目
你可以在产品资料中下载相关的开源机器人模型,用于搭建你自己的项目。

产品使用
USB 档位
驱动板在 USB 档位时,可以使用我们提供的 Python 例程直接来控制总线舵机转动。我们将会在此部分介绍 Python 示例运行步骤。
Windows部署Python环境
首先到Python官网下载最新版本Python的安装包。根据您的操作系统选择进行下载即可,我这里下载的是windows的,版本是3.11.5。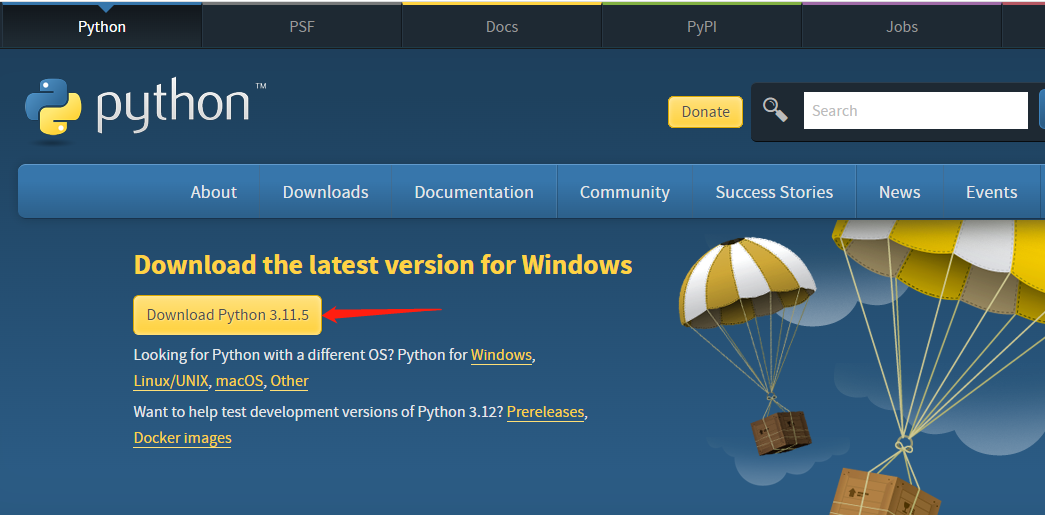
下载完成后,双击安装程序python-3.11.5-amd64,点击“Customize installation(自定义安装)”进入到“Optional Features”可选功能界面,这一界面保持勾选点击“Next”后进入到“Advanced Options”界面,注意一定要保持“Add Python to environment variables”的勾选,安装地址可以点击“Browse”自己修改,这里是默认安装地址,设置好后点击“Install”安装,等待安装完成即可。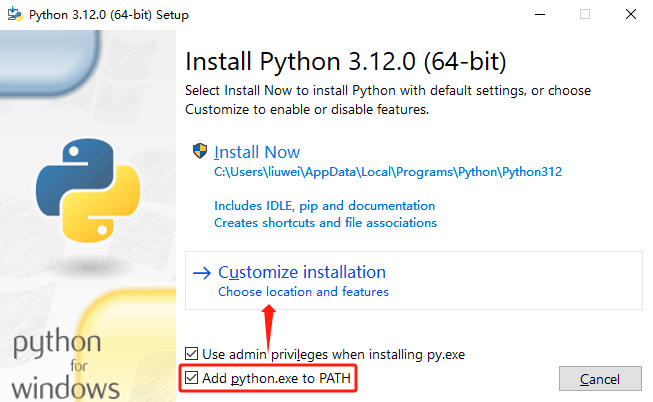
安装好后,接下来我们来进行Python项目编译示例。
ST系列舵机Python运行示例
下载ST 总线舵机控制库(Python)的程序,解压后,接着在开始菜单栏中输入cmd打开Windows的命令提示符界面,输入“cd 文件夹路径”进入到STServo_Python项目文件夹下,这里虚拟环境已被创建,名称是stservo-env,接着输入:
stservo-env\Scripts\activate.bat
该命令用来激活虚拟环境。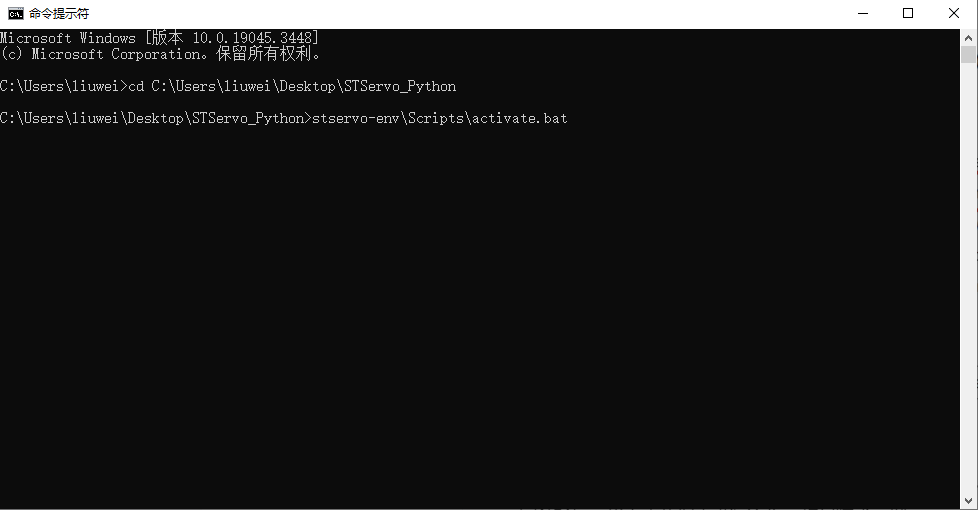
在STServo_Python项目下可以看见有一个requirements.txt文件,该文件是用于存放该项目会使用到的安装包列表。进入虚拟环境后,输入:
python -m pip install -r requirements.txt
使用该命令可以安装该项目使用到的安装包。可以看见这里使用到的安装包只有pyserial且已安装好。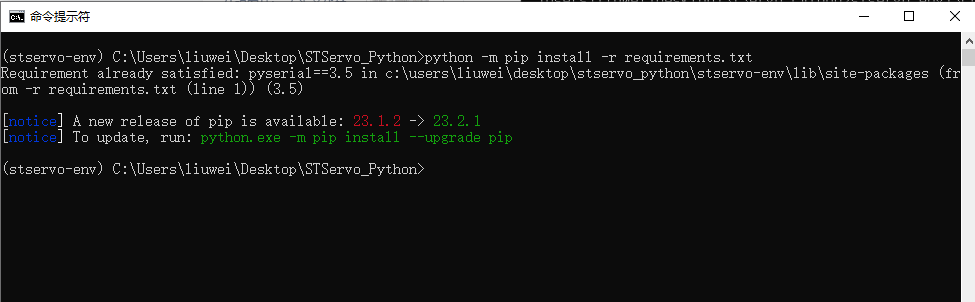
将ST系列舵机与驱动板上的总线舵机接口相连接,并且接入9~12.6V的供电电源,在开始菜单栏中搜索设备管理器,可以查看新接入的端口号。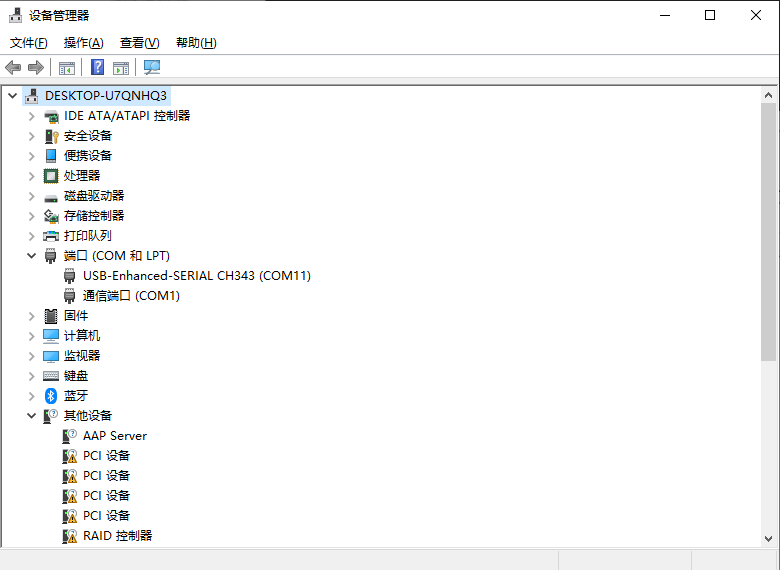
接着将要运行的例程中的设备名称修改为接入的端口号,我这里为COM11(不同电脑接入的端口号不一样)。
修改后就可以进行运行,这里以ping.py文件为例,输入:
python ping.py
可以看见运行成功,ID为1的舵机连接成功。
以上是Python示例的简单教程。
ESP32 档位
驱动板在 ESP32 档位时,可以直接通过 Web 应用控制,驱动板上电后自动建立一个名为 ESP_DEV 的热点供用户连接,密码:12345678,可以直接使用手机、平板、PC 的浏览器访问 192.168.4.1 的 ip 地址来使用 WEB 应用。
资料
原理图
模型
程序
- ST 总线舵机控制库(Python)
- ST/SC 总线舵机控制库(Arduino IDE)
- ST/SC总线舵机控制库(Linux)
- ST系列STM32F103的SDK
- SC系列舵机示例程序
- ST系列舵机示例程序
- ESP32 下载工具
软件
开源结构
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841