

2.36inch e-Paper Module (G)教程
各项参数
| 尺寸 | 2.36英寸 |
| 驱动板尺寸 | 69.5mm x 39.5mm |
| 显示尺寸 | 52.096mm x 29.568mm |
| 外形尺寸(裸屏) | 68.1mm × 37.9mm × 0.85mm |
| 工作电压 | 3.3V / 5V(供电和信号均需为5V) |
| 通信接口 | SPI |
| 点距 | 0.176 × 0.176mm |
| 分辨率 | 296 x 168 |
| 显示颜色 | 黑、白、黄、红 |
| 灰度等级 | 2 |
| 刷新时间 | 12s |
| 刷新功耗 | < 57 mW(typ.) |
| 休眠电流 | < 0.01uA(接近0) |
- 刷新时间:刷新时间为实验测试数据,实际刷新时间会有误差,以实际效果为准。全局刷新过程中会有闪烁效果,这个是正常现象。
- 刷新功耗:功耗数据为实验测试数据,实际功耗由于驱动板的存在和实际使用情况不同,会有一定误差,以实际效果为准。
通信方式
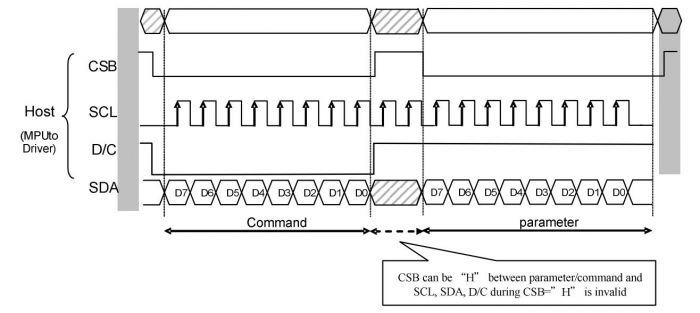
工作原理
本产品使用的电子纸采用“微胶囊电泳显示”技术进行图像显示,其基本原理是悬浮在液体中的带电纳米粒子受到电场作用而产生迁移。电子纸显示屏是靠反射环境光来显示图案的,不需要背光,在环境光下,电子纸显示屏清晰可视,可视角度几乎达到了 180°。因此,电子纸显示屏非常适合阅读。
编程原理
对于四色墨水屏,我们可以参照黑白四灰度的图片进行理解,不过还是有写不同
为了节约内存空间、墨水屏对像素进行了压缩:
黑色:对应00b
白色:对应01b
黄色:对应10b
红色:对应11b
我们拿4个像素点来举例:
| pixel | 1 | 2 | 3 | 4 | ||||
| bit | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 存储的数据 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 1 |
| 对应颜色 | 黑 | 白 | 黄 | 红 | ||||
| byte | 0x1B | |||||||
往寄存器0x10中写入数据0x1B,则将墨水屏中的四个像素点设置成黑、白、黄、红四种颜色
注意事项
- 支持局刷的屏幕,注意使用的时候不能一直用局刷对屏幕进行刷新,需要在做几次局刷之后,对屏幕进行一次全刷清屏。否则会造成屏幕显示效果异常。
- 三色的墨水屏在批量的时候,会存在一定的色差,这个是正常现象,建议将屏幕刷白朝上存放,使用前,先上电做几次刷白操作。
- 注意屏幕不能长时间上电,在屏幕不刷新的时候,要将屏幕设置成睡眠模式,或者进行断电处理。否则屏幕长时间保持高电压状态,会损坏膜片,无法修复。
- 使用墨水屏的时候,建议刷新时间间隔至少是180s, 并且至少每24小时做一次刷新,如果长期不使用墨水屏的话,要将墨水屏刷白存放。(具体储存环境需求参考数据手册)
- 屏幕进入睡眠模式之后,会忽略发送的图片数据,只有重新初始化才能正常刷新。
- 控制 0x3C 或 0x50 (具体参照数据手册)寄存器可以调节边框颜色,在例程中可以调节 Border Waveform Control 寄存器或者 VCOM AND DATA INERTVAL SETTING 进行设置。
- 如果发现制作的图片数据在屏幕上显示错误,建议检查一下图片大小设置是否正确,调换一下宽度和高度设置再试一下。
- 墨水屏的工作电压要求是 3.3V,如果您购买的是裸屏的话,设计电路的时候如果需要配合 5V 工作环境的话,建议做一下电平转换处理。新版本(Rev2.1及后续版本)加入了电平处理电路,可以同时支持 3.3V 和 5V 工作环境,老版本只能支持 3.3V 工作环境,使用的时候可以先确认一下版本号(版本号在板名下)。
- 屏幕的 FPC 排线比较脆弱,注意使用的时候沿屏幕水平方向弯曲排线,不可以沿屏幕垂直方向弯曲排线。
- 墨水屏屏幕较为脆弱,注意尽量避免跌落、碰撞、用力按压。
- 我们建议客户拿到屏幕之后,先用我们提供的示例程序,使用对应的开发板进行测试。
图片处理
多色墨水屏的图片制作与转换
图片数据转换
下载程序
- 四色应用程序:四色图片转换应用程序
- 七色应用程序:七色图片转换应用程序
- 源码:程序源码
注:该应用为方便您的使用友情提供且开源,我司不对其提供技术支持
转换步骤
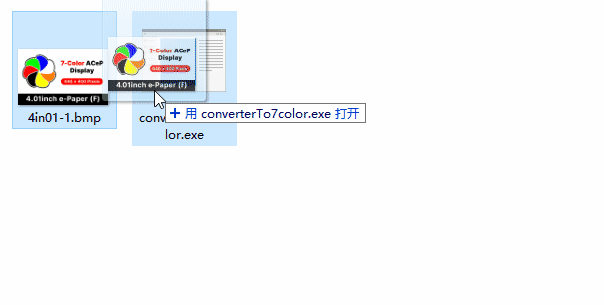
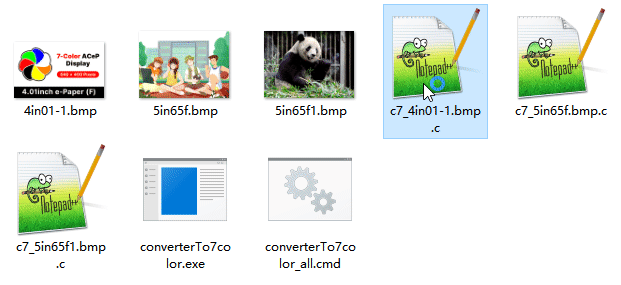
- 将制作好的图片和对应的exe应用程序放在同一文件夹,可以同时放入多个图片。
- 将图片拖放到exe文件上,程序会把图片转换成固定名称的.c文件。
- 双击cmd文件,程序会把文件夹内的所有符合尺寸的图片转换生成相应名字的.c文件。
- 点击图片,查看演示
- 四色单张图片演示演示

- 四色多张图片演示演示

- 七色单张图片演示演示
- 七色多张图片演示演示
Raspberry Pi
硬件连接
连接树莓派的时候,可以直接将板子插到树莓派的 40PIN 排针上去,注意对好引脚。
600px
如果是选择用8PIN排线连接的话,请参考下方的引脚对应表格:
| e-Paper | Raspberry Pi | |
| BCM2835编码 | Board物理引脚序号 | |
| VCC | 3.3V | 3.3V |
| GND | GND | GND |
| DIN | MOSI | 19 |
| CLK | SCLK | 23 |
| CS | CE0 | 24 |
| DC | 25 | 22 |
| RST | 17 | 11 |
| BUSY | 24 | 18 |
开启SPI接口
- 打开树莓派终端,输入以下指令进入配置界面:
sudo raspi-config 选择Interfacing Options -> SPI -> Yes 开启SPI接口
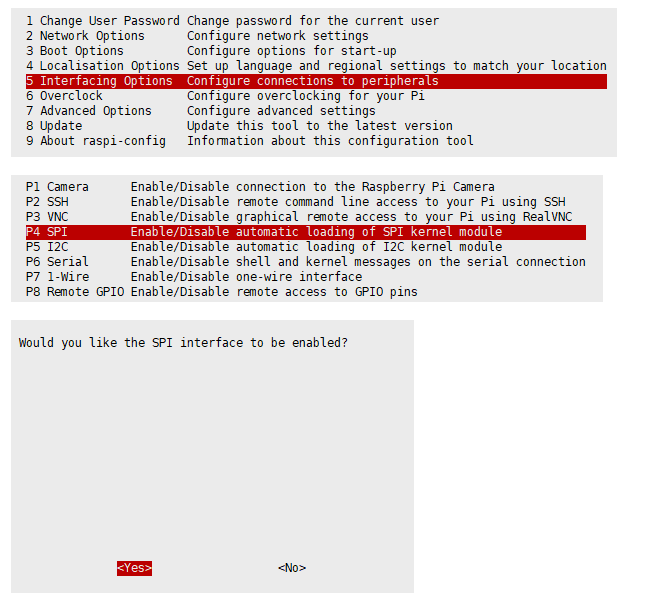
sudo reboot
请确保SPI没有被其他的设备占用,你可以在/boot/config.txt中检查。
运行C语言例程
- 安装BCM2835
#打开树莓派终端,并运行以下指令: wget http://www.airspayce.com/mikem/bcm2835/bcm2835-1.71.tar.gz tar zxvf bcm2835-1.71.tar.gz cd bcm2835-1.71/ sudo ./configure && sudo make && sudo make check && sudo make install # 更多的可以参考官网:http://www.airspayce.com/mikem/bcm2835/
- 安装wiringPi(可选)
#打开树莓派终端,并运行以下指令: sudo apt-get install wiringpi #对于树莓派2019年5月之后的系统(早于之前的可不用执行),可能需要进行升级: wget https://project-downloads.drogon.net/wiringpi-latest.deb sudo dpkg -i wiringpi-latest.deb gpio -v # 运行 gpio -v 会出现 2.52 版本,如果没有出现,说明安装出错。 #Bullseye分支系统使用如下命令: git clone https://github.com/WiringPi/WiringPi cd WiringPi ./build gpio -v # 运行 gpio -v 会出现 2.60 版本,如果没有出现,说明安装出错。
- 下载程序(已下载可跳过这一步)
sudo apt-get install p7zip-full wget https://www.waveshare.net/w/upload/3/39/E-Paper_code.7z 7z x E-Paper_code.7z -O./e-Paper cd e-Paper/RaspberryPi_JetsonNano/
- 编译程序(说明:-j4 为使用4线程编译,数字可自行修改;EPD=_4in37g 是指定一个宏定义,_4in37g 对应主函数中的测试程序)
# 此时在 e-Paper/RaspberryPi_JetsonNano 位置 cd c sudo make clean sudo make -j4 EPD=_4in37g
- 运行程序
sudo ./epd
运行python例程
- 安装函数库
sudo apt-get update sudo apt-get install python3-pip sudo apt-get install python3-pil sudo apt-get install python3-numpy sudo pip3 install RPi.GPIO sudo pip3 install spidev
- 安装函数库(python2)
sudo apt-get update sudo apt-get install python-pip sudo apt-get install python-pil sudo apt-get install python-numpy sudo pip install RPi.GPIO sudo pip install spidev
- 下载程序(已下载可跳过这一步)
sudo apt-get install p7zip-full wget https://www.waveshare.net/w/upload/3/39/E-Paper_code.7z 7z x E-Paper_code.7z -O./e-Paper cd e-Paper/RaspberryPi_JetsonNano/
- 运行程序
# 确保在 e-Paper/RaspberryPi_JetsonNano/ 位置 cd python/examples/ python3 epd_4in37g_test.py

Jetson Nano
硬件连接
Jetson Nano 的 40PIN 引脚是兼容树莓派的 40PIN 引脚的,并且提供了一个 Jetson.GPIO 库跟树莓派的 RPI.GPIO 库的 API 是一致的,所以这里连接的序号跟树莓派的是一样的,使用 40PIN 接口时,可以直接将模块插入 Jetson Nano 的 40Pin 排座。
600px
如果是选择用8PIN排线连接的话,请参考下方的引脚对应表格:
| e-Paper | Jetson Nano Developer Kit | |
| BCM2835编码 | Board物理引脚序号 | |
| VCC | 3.3V | 3.3V |
| GND | GND | GND |
| DIN | 10(SPI0_MOSI) | 19 |
| CLK | 11(SPI0_SCK | 23 |
| CS | 8(SPI0_CS0) | 24 |
| DC | 25 | 22 |
| RST | 17 | 11 |
| BUSY | 24 | 18 |
运行C语言例程
- 下载测试程序:(已下载可跳过这一步)
sudo apt-get install p7zip-full wget https://www.waveshare.net/w/upload/3/39/E-Paper_code.7z 7z x E-Paper_code.7z -O./e-Paper cd e-Paper/RaspberryPi_JetsonNano/
- 编译程序(说明:JETSON为指定设备,不指定默认为RPI;-j4 为使用4线程编译,数字可自行修改;EPD=_4in37g 为指定一个宏定义,_4in37g 对应主函数中的测试程序)
# 此时在 e-Paper/RaspberryPi_JetsonNano 位置 cd c sudo make clean sudo make JETSON -j4 EPD=_4in37g
- 运行程序
sudo ./epd
运行python例程
- 安装函数库
sudo apt-get update sudo apt-get install python3-numpy sudo apt-get install python3-pip sudo pip3 install Jetson.GPIO
- 下载程序(已下载可跳过这一步)
sudo apt-get install p7zip-full wget https://www.waveshare.net/w/upload/3/39/E-Paper_code.7z 7z x E-Paper_code.7z -O./e-Paper cd e-Paper/RaspberryPi_JetsonNano/
- 运行程序
# 确保在 e-Paper/RaspberryPi_JetsonNano/ 位置 cd python/examples/ python3 epd_4in37g_test.py
Sunrise X3 Pi
硬件连接
连接树莓派的时候,可以直接将板子插到旭日派的 40PIN 排针上去,注意对好引脚。
文件:4in37g Connect Direct X3.jpg
如果是选择用8PIN排线连接的话,请参考下方的引脚对应表格:
| e-Paper | Sunrise X3 Pi | |
| BCM编码 | Board物理引脚序号 | |
| VCC | 3.3V | 3.3V |
| GND | GND | GND |
| DIN | MOSI | 19 |
| CLK | SCLK | 23 |
| CS | CE0 | 24 |
| DC | 25 | 22 |
| RST | 17 | 11 |
| BUSY | 24 | 18 |
开启SPI
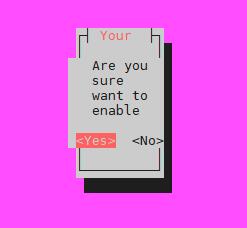
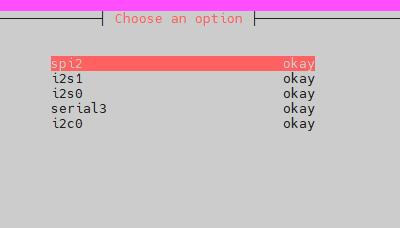
- SPI是默认开启的,如果不小心关闭请按照以下方法进行开启

运行python程序
- 打开树莓派终端,执行:
sudo apt-get install p7zip-full wget https://www.waveshare.net/w/upload/3/39/E-Paper_code.7z 7z x E-Paper_code.7z -O./e-Paper cd e-Paper/RaspberryPi_JetsonNano/
- 对应的库在函数中已安装完成,如果不小心卸载,请使用下面的命令进行安装
sudo apt-get update sudo apt-get install python-pip sudo apt-get install python-pil sudo apt-get install python-numpy sudo pip install Hobot.GPIO sudo pip install spidev
- 下载程序(已下载可跳过这一步)
sudo apt-get install p7zip-full wget https://www.waveshare.net/w/upload/3/39/E-Paper_code.7z 7z x E-Paper_code.7z -O./e-Paper cd e-Paper/RaspberryPi_JetsonNano/
- 运行程序
# 确保在 e-Paper/RaspberryPi_JetsonNano/ 位置 cd python/examples/ python3 epd_4in37g_test.py

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}