树莓派UGV Rover PT【四驱六轮】开源AI云台机器人小车OpenCV
¥1398
制造商:斑梨电子
SKU:0101628
发布时间:2024-07-29 11:17
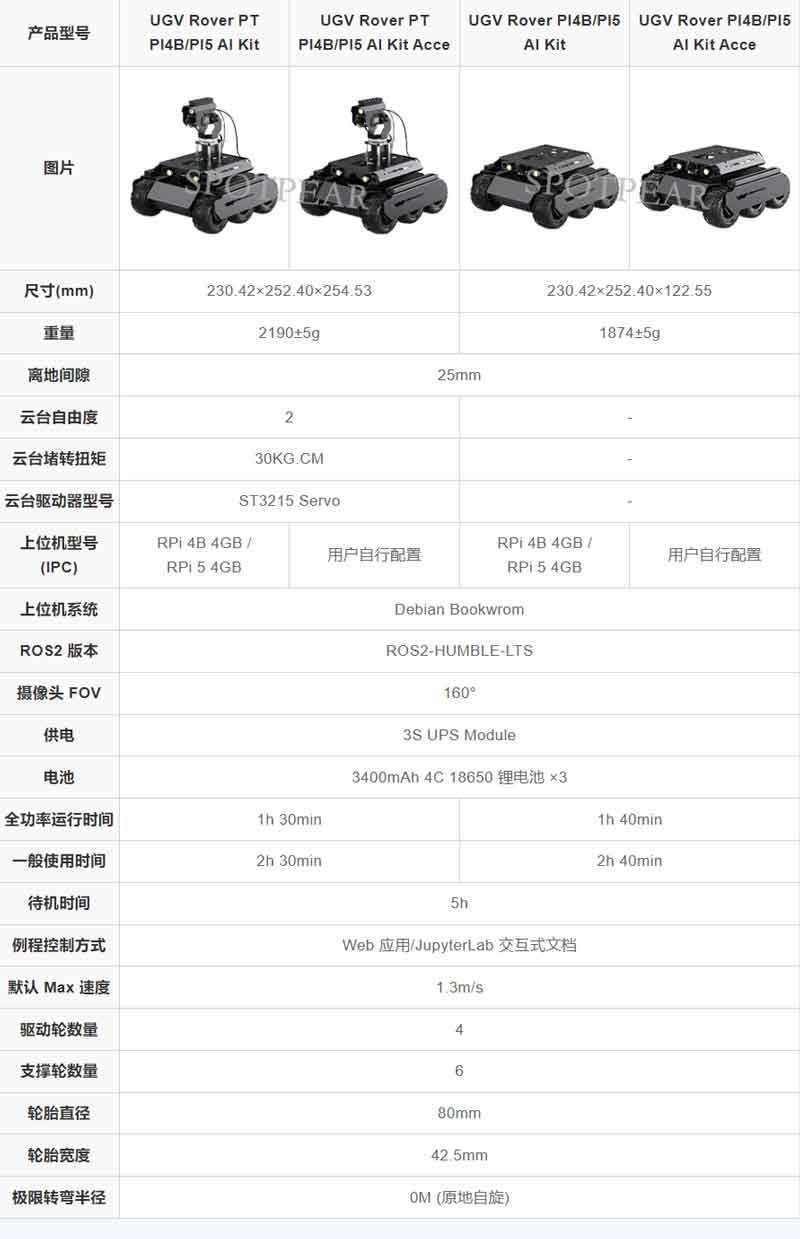
UGV Rover
六轮四驱开源移动机器人,可靠且强大的 AI 伙伴
伴您激发无限的创新力
¥1398
UGV Rover
六轮四驱开源移动机器人,可靠且强大的 AI 伙伴
伴您激发无限的创新力