

UGV Rover PT Jetson Orin ROS2 使用教程
产品介绍
UGV Beast Jetson Orin ROS2 Kit 是一款六轮四驱架构,基于 ROS2 的开源移动机器人。采用大小脑架构设计,ESP32 主控模组的下位机负责电机 PID 控制、IMU 传感器控制、OLED 屏幕控制、舵机控制、灯光开关控制等,分担计算负载的同时为上位机节省 IO 资源以及提供高效的通信接口,上位机使用 Jetson Orin Nano,确保实现高阶算力和指定策略等高级功能。
机器人机身结构采用2mm厚度的全铝合金外壳,结构强度高、耐用性好。采用软质防滑橡胶轮胎,搭配 4 个带编码器减速电机,实现闭环速度控制,有效防止震动,实现出色的运动性能,最高速度可达 1.3m/s。内置 3S 锂电池 UPS 供电模块,提供了强劲而持久的动力,支持边充电边使用,满足长时间的开发和使用需求。
Jetson Orin Nano 搭配 USB 摄像头,通过高帧率低延时的摄像头实时画面,用户可以享受流畅的视觉体验,并且可以通过拍照和录像等功能捕捉到不同的精彩瞬间。此外,机器人的多种信息反馈——包括电池电压、CPU使用率等,都通过 WEB 应用实时显示,使得用户可以实时监控机器人的状态。
机器人的视觉系统配备了一个 2 自由度的大扭矩灵活云台和一个 160° 超广角的 500 万像素摄像头,为用户提供了宽广的视角和灵活的观察角度、以及多样的 AI 机器视觉功能。云台旁的高亮度 LED 聚光灯保证了在光线不足的环境下也能清晰使用。此外,通过鱼骨导轨的设计,用户可以轻松扩展更多战术配件,进一步增强了机器人的功能性。
基于 ROS2 机器人操作系统,搭载激光雷达和深度摄像头,能够实时构建二维地图和三维建模,辅助机器人进行路径规划和自主导航。利用大规模语言模型技术,用户可以通过自然语言对机器人进行控制,提升人机交互体验。通过 WEB 应用控制台,用户能够直接控制机器人,轻松进行任务管理与实时调试。同时,Gazebo 仿真环境为开发者提供了虚拟测试平台,在真实部署前确保系统稳定性。
为了让用户能够充分利用这款机器人的潜力,我们提供了丰富的文档和教程,包括 JupyterLab 的 WEB 应用以及 ROS2 功能文档。无论是机器人技术的初学者还是经验丰富的开发者,都可以通过这些资源一步一步地深入了解、学习和创造。
产品特性
- 高效的大小脑架构:下位机主控为 ESP32,负责精确的电机 PID 控制和多种传感器读取,上位机 Jetson Orin Nano 提供高阶算力,双层架构让机器人运行更高效。
- 开源代码:上位机基于 Ubuntu 22.04 开发,ROS2 功能基于 Humble 版本进行开发,WEB 应用基于 Flask、Python 语言,软件平台全部开源,便于用户学习和二次开发。
- 丰富的教程资源:提供丰富的 JupyterLab 交互式教程、图文教程、视频教程和 ROS2 功能教程,从入门功能到高级功能,用户可以边看教程边学习如何控制机器人,降低小白的机器人技术学习曲线。
- 视角广泛:配备2自由度大扭矩灵活云台,提供横向 360° 全方位广阔的观察角度;搭配一个 160° 超广角的 500 万像素的摄像头,捕捉到更广泛的画面。
- 机器视觉功能:集成了颜色、物体、手势识别,人脸、运动检测等机器视觉功能,可扩展为更多应用。
- 丰富的交互方式:实时视频流、数字变焦、拍照、录像等功能,且 WEB 应用实时视频功能和画面上显示的机器人信息,提高用户交互体验。
- 跨平台远程控制:支持实现跨平台远程控制,无需安装APP,可根据教程使用蒲公英、Cpolar、LocalTunnel等方案进行超出局域网范围的远程控制。
- 可扩展性:结构上配有一个扩展平面和鱼骨导轨,方便扩展其它战术配件;硬件上,LED 灯接口有剩余的,可用于扩展水弹枪等其它外设,产品还可扩展 4G、5G 模块,方便用户实现更多的可能性。
- 结构耐用:2mm 厚度的全铝合金外壳,提供了卓越的结构强度和耐用性。
- 高性能驱动电机:配备四个带编码器减速电机,实现闭环速度控制,最高速度可达 1.3m/s,提供强劲动力。
- 全驱与高品质轮胎:采用四轮驱动系统,搭配软质防滑橡胶轮胎,确保机器人在各种地形上都有良好的抓地力和稳定性。
- 长续航力:采用 3S 锂电池 UPS 供电系统,支持边充电边使用,确保了长时间的续航能力。
产品组装
该部分组装教程主要包括两个方面,第一是型号名中为 ACCE 版本的产品安装 Jetson Orin 以及oak相机和雷达的教程,第二是安装锂电池的教程。
产品基础使用
使用前注意事项
使用前请务必了解以下内容:
- 该产品出厂未安装好锂电池,需要客户自行安装好 3 个 18650 锂电池才可以正常使用。购买 ACCE 型号的客户需要自备 Jetson Orin Nano 主板,且安装好 Jetson Orin Nano 后才可正常使用;海外版的客户需要自行购买 3 颗 18650 锂电池,推荐使用 2200mA 或以上容量,放电倍率 4C 的 18650 锂电池。这两个安装教程请参考【产品组装】。
- 首次接上电池需注意电池模块上是否有 LED 灯亮,如果 LED 灯亮则表示电池的正负极接反,电池未接反不会有 LED 灯亮,请检查并确保电池未接反。电池接反的情况下禁止充电,否则有几率引起爆炸。
- 该产品不能受到剧烈的撞击,且不防水。
首次使用
产品出厂带有的 Jetson Orin Nano 是带有已经配置好软件和 ROS2 功能的硬盘,给产品开机即可使用。
确保已安装好 3 节锂电池,首次使用需要先使用配置的 12V 5A 电源线接入到产品的电源接口中,打开电源开关后产品会进行初始化,OLED 屏幕会显示初始化的一系列内容;Jetson Orin Nano 在开机的过程中会自动建立一个热点,并且在项目主程序自动运行后会将 IP 地址显示在 OLED 屏幕上,开机完成后 OLED 屏幕显示的内容含义如下:
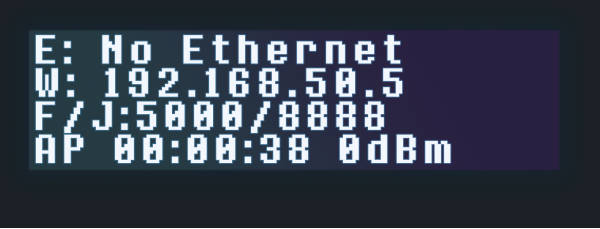
- 第一行 E:网口的 IP 地址,可以用来远程连接 Jetson Orin Nano;No Ethernet 表明此时 Jetson Orin Nano 上无网线接入。
- 第二行 W:AP 模式下建立热点后,会显示默认 IP 为 192.168.50.5;STA 模式下连接到已知 WIFI 所分配的 IP 地址;显示出的 IP 地址可以用来无线连接 Jetson Orin Nano。
- 第三行 F/J:网络端口号,5000 用于访问产品主程序控制页面,8888 用于访问 JupyterLab 页面;
- 第四行 AP 表示此时 WIFI 处于 AP 模式下,时间表示设备的使用时长;以 dBm 为单位的数值表示 WIFI 处于 STA 模式下的信号强度 RSSI。
Jetson Orin Nano 开机后,
- 若产品没有连接到已知 WIFI,则会自动建立热点,用手机/电脑连接该产品自动建立的热点,热点名称为 AccessPopup,热点密码为 1234567890,连接好后打开浏览器,输入 AP 模式下 设备默认的 IP 地址(该地址会在 OLED 屏幕上的 W 行处显示),即在网址栏中输入 192.168.50.5:5000 访问产品主程序的 WEB 控制界面。
- 若产品连接到已知 WIFI,则可以通过访问Jetson Orin 的 IP 地址:5000 来访问产品主程序的 WEB 端控制界面。例如:192.168.10.156:5000。
注意:访问的设备要与 Jetson Orin 设备在同一个局域网下才可访问成功。
网络配置
初次配置 WIFI 时,需要准备网线或者 USB 数据线,使用 USB 数据线时还需要准备一台电脑。
打开终端前的操作:
- 网线:产品开机后,连接网线,OLED 屏幕上面会自动显示出来网线的 IP,在 E 后面的 IP 就是有线 IP,E代表 eth0,在浏览器中输入这个 IP 地址:8888, 打开 jupyterLab,接着打开 Terminal
- USB 数据线:Jetson 的 Micro USB 口有默认 IP 地址 192.168.55.1, 没有屏幕的用户可以通过 ssh 远程 Jetson Orin Nano 操作:
- 给产品开机后,用一条 USB 数据线将 Jetson Nano 的 Micro USB 口连接到电脑
- 用 Putty 或者 MobaXteram 软件 ssh 192.168.55.1 IP 地址远程登录 Jetson Nano
- 出厂 Jetson Orin Nano 系统的默认用户名和密码均为 jetson
登入终端后,初次配置 WIFI 连接到已知热点,需要关闭正在后台运行的 AccessPopup 循环扫描任务,先浏览到 AccessPopup 的文件夹:
cd ugv_jetson/AccessPopup/运行 AccessPopup 配置脚本:
sudo chmod +x installconfig.sh sudo ./installconfig.sh
输入 7,回车,卸载 AccessPopup,(当它连接已知 WIFI 后,后续你需要 Jetson 再自动建立热点可以执行相似的步骤,但是选择 1 安装 AccessPopup,然后它开机时就可以自动建立热点了)。
等待卸载完成,按任意键退出,再输入 9,回车,退出 AccessPopup。
确保 WIFI 处于开启状态:
sudo nmcli r wifi on
列出周围的已知 WIFI 网络:
sudo nmcli d wifi list
连接到已知 WIFI:
sudo nmcli d wifi connect <my_wifi_ssid> password <my_wifi_password>
你需要根据自己的情况,将上面的 <my_wifi_ssid> 和 <my_wifi_password> 替换为自己的热点名称和密码,例如:sudo nmcli d wifi connect wifi_name password 1234567890
产品教程目录
产品上位机使用
产品 ROS2 使用
资料下载
尺寸图纸
STEP 模型
ROS2 开源项目
- 项目地址:UGV Beast ROS2 功能包
产品开源程序
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841

