

ESP32机器人通用驱动板 多功能接口 支持WIFI蓝牙 ESP-NOW等无线通讯 兼容树莓派 Jetson Nano 等
¥149
【产品特性】
[] 基于 ESP32-WROOM-32 模组,支持 WIFI、蓝牙和 ESP-NOW 等无线通信方式
[] 板载电机控制接口,可控制 2 个带编码器的直流电机或 4 个(两组)不带编码器的直流电机
[] 板载总线舵机控制接口,可控制多达 253 个 ST3215 总线舵机并获取舵机反馈
[] 板载九轴 IMU,可随时获取姿态和航向信息
[] 7~13V 电压输入,可使用 2S 或 3S 锂电池直接供电
[] 带有自动下载电路,方便上传程序
[] 支持输入电压电流检测
[] 板载 Micro SD 卡槽
[] 板载激光雷达接口,并集成了串口转 USB 功能
[] I2C 接口,可用于扩展其它 OLED、IMU 等 I2C 通信协议的外设
[] 多功能扩展接口,引出了剩余接口用于扩展其它功能,例如控制舵机或继电器
[] 40PIN 扩展接口,可用来连接树莓派、Jetson Nano、旭日 X3 派等上位机,通过串口或 I2C 通信,并为上位机供电
[] 开源板载资源的使用例程,并配有详细教程方便新手入门
【产品参数】
[] 主控模组:ESP32-WROOM-32
[] 主控芯片:ESP32
[] 供电电压:DC 7~13V
[] 供电接口:XH2.54
[] 天线接口:IPEX1
[] 下载接口:Type-C
[] 无线通信方式:WIFI、蓝牙、ESP-NOW
[] 产品尺寸:65 × 65mm
[] 定位孔间距:49 × 58mm
[] 定位口直径:3mm
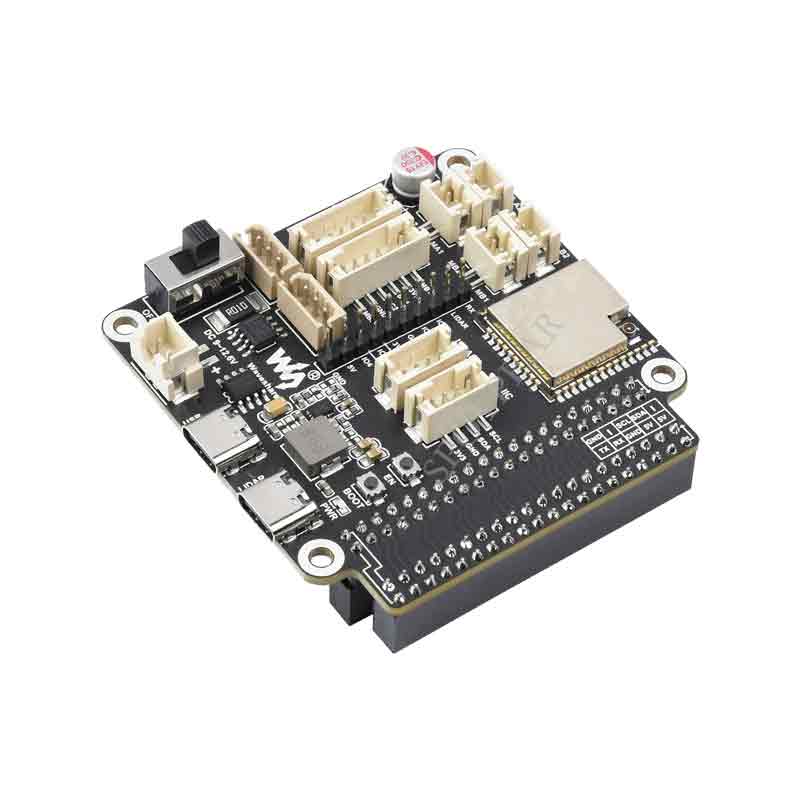
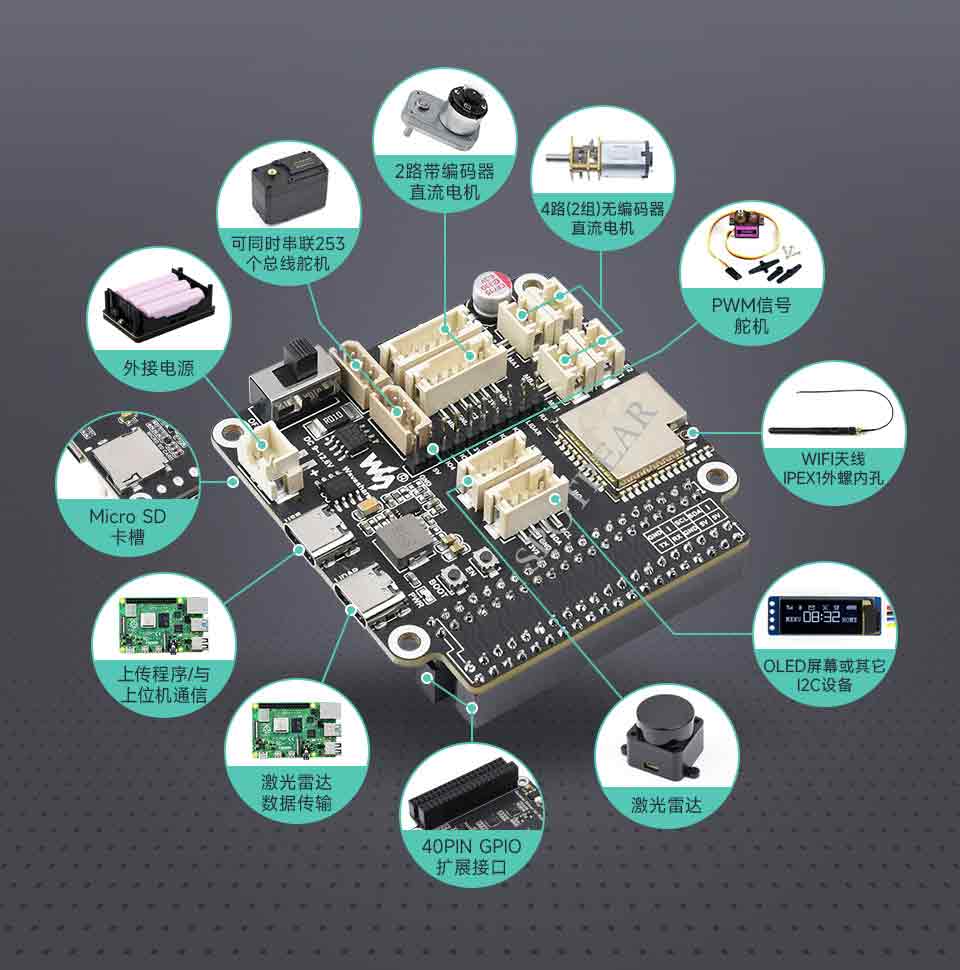
【板载丰富的外设接口】
[] 可用于驱动多种类型的机器人

【ESP32 主控】
[] 丰富资料,方便二次开发
[] 内置 WIFI 和蓝牙,同时支持 ESP-NOW,可以进行无线通信

【支持多种外设连接】
【40PIN 扩展接口】
[] 内侧可直接插入树莓派主控板,外侧可通过杜邦线接入其他扩展板
[] 内外侧 40PIN GPIO 接口为一一对应关系

【总线舵机控制】
[] 可同时控制多达 253 个 ST3215 总线舵机
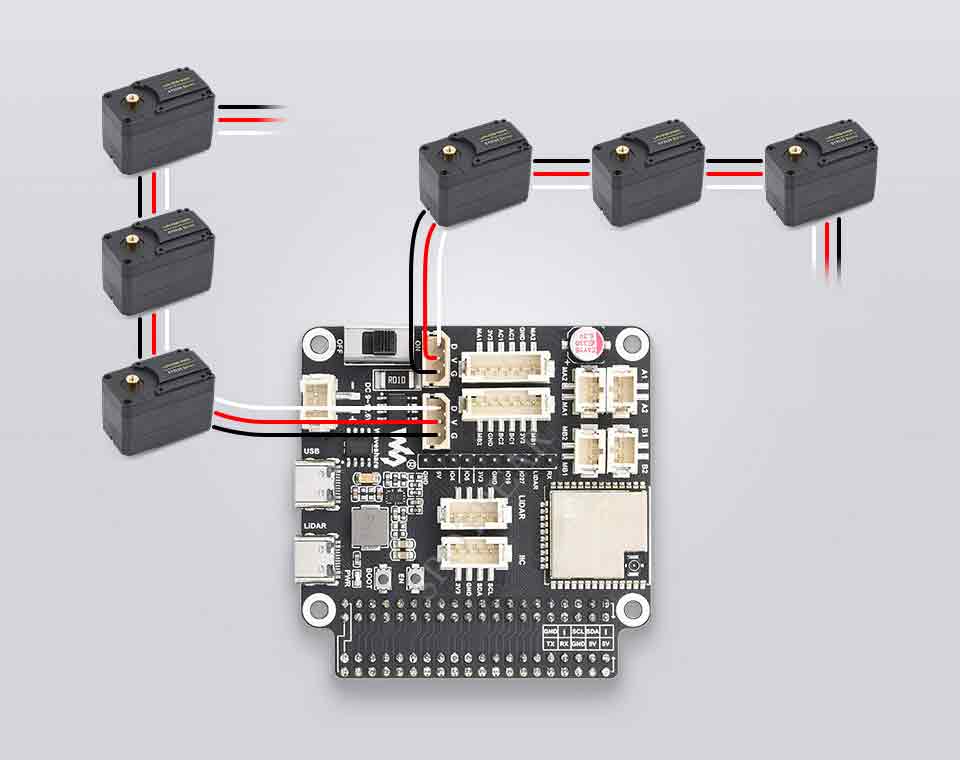
注意事项:一路 UART 可以控制 253 个总线舵机,但是由于舵机功率较大,当使用过多舵机时需要考虑供电方案能否满足需求
【电压电流检测】
[] 板载电压电流检测芯片,随时获取机器人供电状态

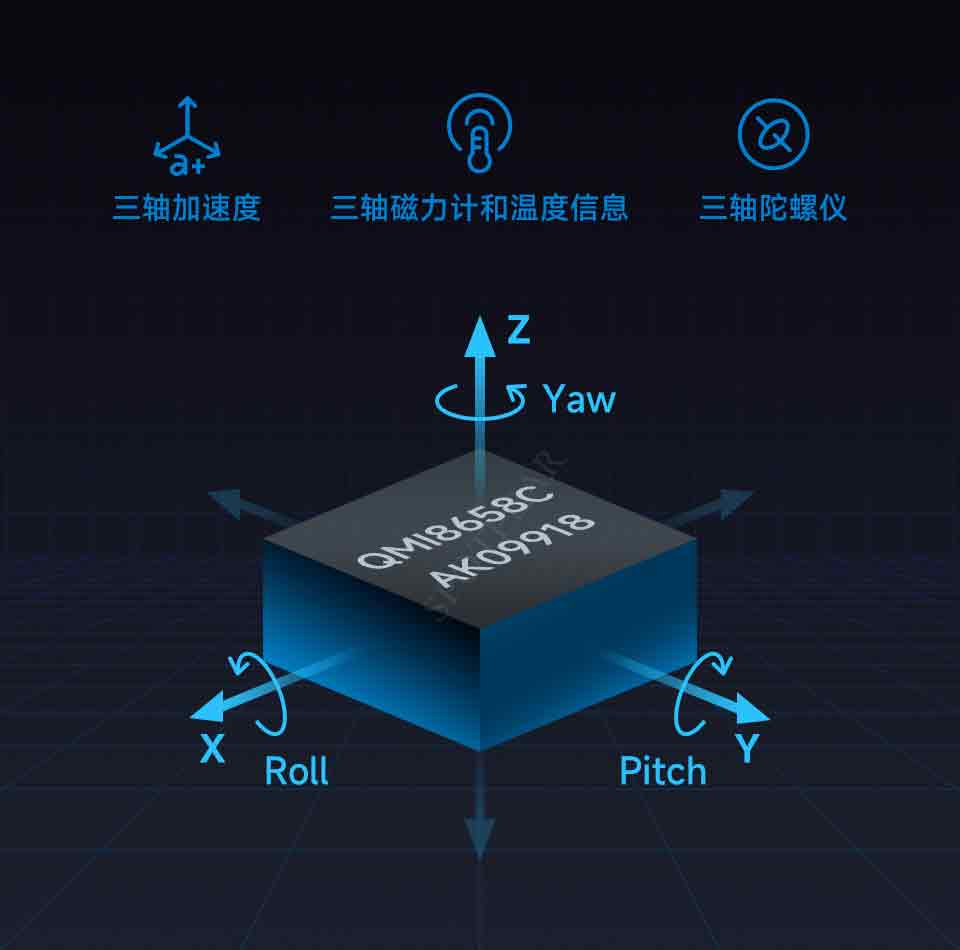
【板载 9 轴 IMU】
[] 板载 QMI8658C+AK09918,可检测 运动姿态、方位和磁场 随时随地获取机器人的航向角
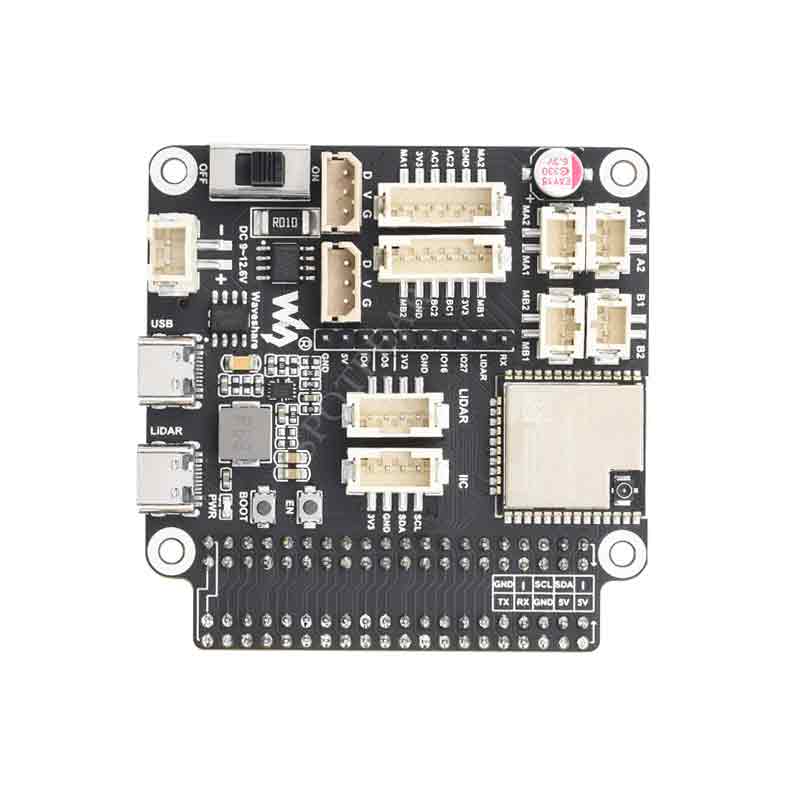
【资源简介】
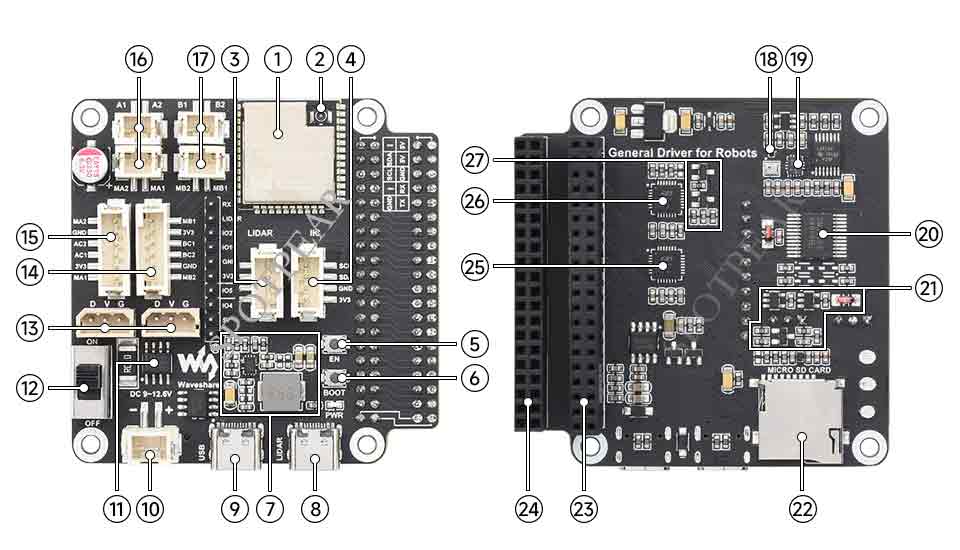
1. ESP32-WROOM-32 主控模组
可使用 Arduino IDE 进行开发
2. IPEX 一代 WIFI接口
用于连接 WIFI 天线增加无线通信距离
3. 激光雷达接口
集成了雷达转接板的功能
4. I2C 外设扩展接口
可用于连接 OLED 屏幕或其它 I2C 传感器
5. 复位按键
按下后松开,ESP32 会重启
6. 下载按键
按下时开机,ESP32 会进入到下载模式
7. DC-DC 5V 稳压电路
可为上位机例如树莓派或 Jetson nano 等供电
8. Type-C 接口 (LADAR)
激光雷达数据接口
9. Type-C 接口 (USB)
ESP32 串口通信接口、可为 ESP32 上传程序
10. XH2.54 供电接口
输入 DC 7~13V,该接口直接为总线舵机和电机供电
11. INA219
电压电流监测芯片
12. 开关
控制外部供电的开关
13. ST3215 总线舵机接口
用于连接 ST3215 总线舵机
14. 电机接口 PH2.0 6P
B 组带编码器的电机接口
15. 电机接口 PH2.0 6P
A 组带编码器的电机接口
16. 电机接口 PH2.0 2P
A 组无编码器的电机接口
17. 电机接口 PH2.0 2P
B 组无编码器的电机接口
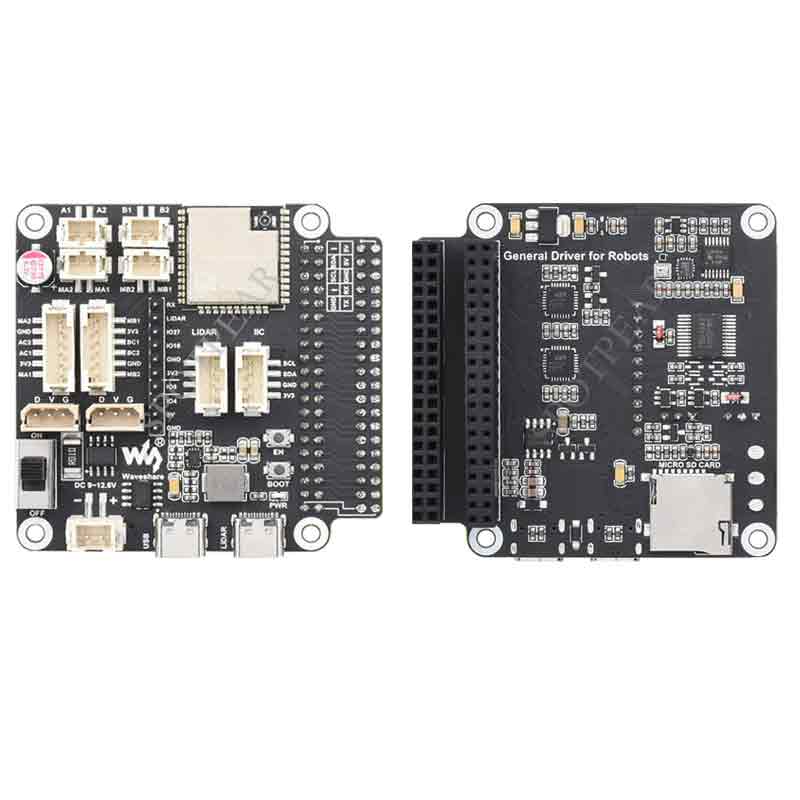
18. AK09918C
3 轴电子罗盘
19. QMI8658C
6 轴运动传感器
20. TB6612FNG
电机控制芯片
21. 总线舵机控制电路
可用于扩展多个 ST3215 总线舵机,并获取舵机反馈
22. SD 卡槽
可用于存储日志或 WIFI 配置
23. 40PIN 上位机接口
方便接入树莓派或旭日 X3 派
24. 40PIN 扩展接口
方便使用树莓派或旭日 X3 派的引脚
25. CP2102
串口转 USB,用于雷达数据传输
26. CP2102
串口转 USB,用于 ESP32 串口通信
27. 自动下载电路
为 ESP32 上传程序时不需要按 EN 和 BOOT 按键
【开源板载资源的使用例程和教程】