

2.13inch e-Paper Cloud Module使用教程
产品简介
参数、特点说明
自我介绍
我是针对2.13inch e-Paper设计的无线网络驱动板。
我有电池接口,可以使用电池供电。
我使用Type-C接口,紧跟社会潮流。
我支持Arduino开发,你可以像使用其它Arduino板一样使用我。
我可以通过WiFi或者蓝牙从PC机或智能手机上获取图片信息,并将信息通过电子墨水屏显示出来。
产品参数
- WiFi 标准:802.11b/g/n
- 通信接口: SPI
- 蓝牙标准:4.2,包含传统蓝牙(BR/EDR)和低功耗蓝牙(BLE)
- 通信接口:3-wire SPI、4-wire SPI(默认)
- 供电方式:电池供电
- 充电电流:1A
- 外形尺寸:71mm × 30.2mm
- 显示尺寸:48.55mm × 23.7mm
- 点距:0.194* 0.194
- 分辨率:250*122
- 显示颜色:黑、白
- 灰度等级:2
- 局部刷新 :0.3s
- 全局刷新 :2s
【备注】: 刷新时间:刷新时间为实验测试数据,实际刷新时间会有误差,以实际效果为准。全局刷新过程中会有闪烁效果,这个是正常现象
功耗:功耗数据为实验测试数据,实际功耗由于驱动板的存在和实际使用情况的不同,会有一定误差,以实际效果为准
特点
- 板载 ESP32,支持 Arduino 开发
- 无需背光,断电可长时间保持最后一屏的显示内容
- 电压检测电路,可以检测电池电路避免过度放电
- 拥有电池接口和充电电路,可以离线使用
- 提供安卓手机 APP 程序,可通过蓝牙 EDR 更新显示内容,方便使用
- 提供 HTML 上位机程序,可通过网页远程更新显示内容,方便集成到各种网络应用中
- 支持 Floyd-Steinberg 抖动算法,以获得更多的颜色组合,对原始图片进行更好的阴影渲染
- 支持多种常用图片格式(BMP、JPEG、GIF 和 PNG 等)
- 出厂内置电子墨水屏驱动程序(开源)
产品应用
本产品配合墨水屏,适用于无线刷图的应用场景。
- 电子名片
- 设备标签
- 货架标签
- 信息储存
- 串口信息显示牌等
功能引脚
| 功能引脚 | ESP32 | 描述 |
| VCC | VCC | 电源正(3.3V电源输入) |
| GND | GND | 电源地 |
| KEY | 12 | 用户按键 |
| SCK | 13 | SPI的CLK,时钟信号输入 |
| DIN | 14 | SPI的MOSI,数据输入 |
| CS | 15 | 片选,低电平有效 |
| BUSY | 25 | 忙状态输出引脚(表示忙碌) |
| RST | 26 | 复位,低电平有效 |
| DC | 27 | 数据/命令,低电平表示命令,高电平表示数据 |
| ADC | 36 | ADC输入引脚,电压为1/3电池电压 |
PS:以上为板子固定连接,无需用户额外操作
使用准备
使用准备
硬件操作、环境搭建和程序说明等
硬件连接
- 将屏幕接入 2.13inch e-Paper Cloud Module:

- 使用一条 Type-C线将 ESP32 驱动板接入到电脑或者 5V 电源
下载例程
我们有提供本地、蓝牙、WiFi三种例程,本页面的“资料”标签内可以找到示例程序,或者点击 示例程序 下载
将下载下来的压缩包解压出来,可以得到以下文件: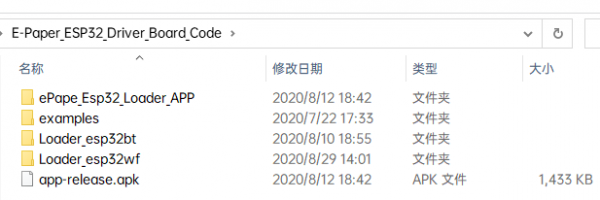
- ePape_Esp32_Loader_APP:蓝牙App源码(Android Studio)
- examples:本地例程
- Loader_esp32bt:蓝牙例程
- Loader_esp32wf:WiFi例程
- app-release.apk:蓝牙例程App安装包
环境配置
- 如果您电脑之前没有安装 Arduino IDE,或者 IDE 的版本比较老。建议到 Arduino 官方网站根据自己的系统下载最新的 IDE 并安装。
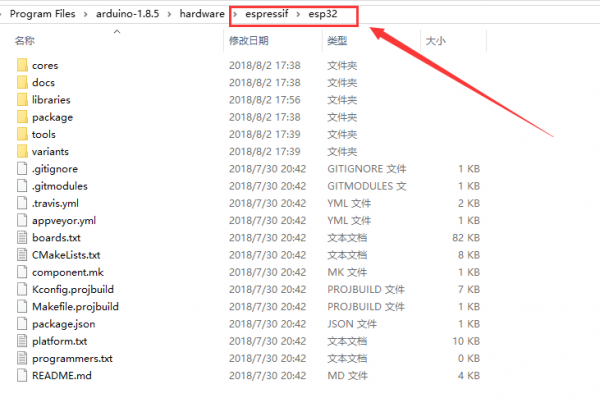
官方链接:https://www.arduino.cc/en/Main/Software - 下载 Arduino-ESP32 支持包:https://codeload.github.com/espressif/arduino-esp32/zip/master (GitHub国内访问比较慢)并将压缩包里面的文件解压到 Arduino IDE 安装目录下的 hardware\espressif\esp32 路径。(注意:如果在安装目录没有该路径,可以手动创建)
- 打开 tools,并以管理员身份运行以下 get.exe 文件
- 等待安装完成后,可以在 IDE 的 Tools - Boards 里面找到 ESP32 Dev Module 的型号选项即可
图像处理算法
在蓝牙和WiFi例程中,提供了两种图像处理算法,分别是 Level(色阶法)以及 Dithering(抖动法)
色阶法
一张图像,我们可以把它划分为几个大的颜色域,图像上的每个像素点根据颜色跟这几个色域的趋近程度,被划分到这些颜色域中去。这种方法比较适用于颜色不多的图像,例如亮色或者三色的形状或者文字图像。以黑白红三色墨水屏为例,处理图像的时候我们希望把它处理成黑白红三色,因此对于一张图像来说,我们可以把图像的所有颜色划分三个大的颜色区域:黑色区域,白色区域,红色区域。
比如根据下图,如果灰度图中的某个像素点的值等于或者小于127的话,我们把这个像素点视为黑色像素,否则,就是白色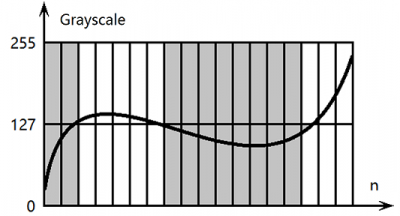
对于彩色图来说,我们都知道RGB有三色通道,相对于红色通道来说,我们可以把蓝色和绿色统称为蓝-绿通道,或者是非红通道。根据下面的图,彩色图像上的某个像素点,如果它红色通道的值很高,但是蓝-绿通道的值很低的话,我们将它归为红色像素;如果说它红色通道和蓝-绿通道的值都很低的话,我们将它归为黑色像素;红色和蓝-绿通道值都很高的话我们把它归为白色。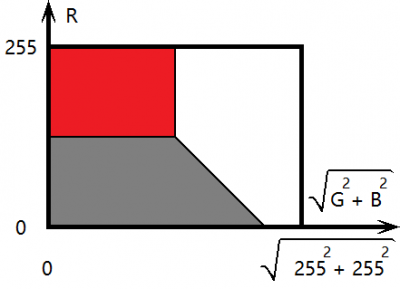
算法中,对于颜色定义是根据RGB值以及预期颜色值的平方和的差值计算的。其中预期颜色值是指的像素点最趋近的那个颜色值,这些值被保存在 curPal 数组中。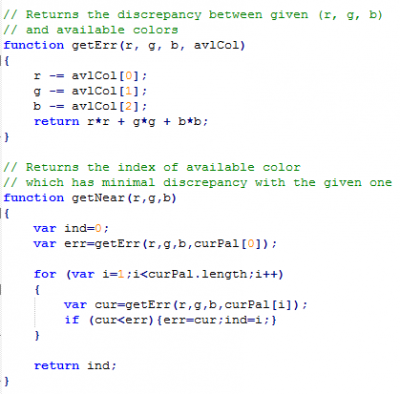
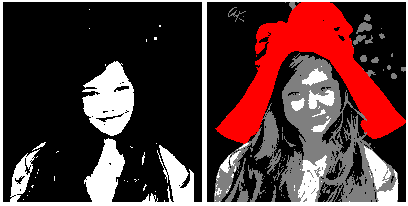
抖动法
对于那些颜色比较多,或者渐变区域比较多的图像,上面的色阶法并不太合适,很多时候图像里面的渐变区域的像素可能跟所有颜色域都很接近,如果用色阶法的画就会让图像丢失很多图像细节。很多摄像头拍摄的图片,通过混合颜色的方法来绘画阴影和过度区域,这些图像中,渐变区域占了大部分
对于人眼来说,很容易把特别小的颜色混淆了,比如两种颜色红和蓝并列,如果把它缩小到足够小的手,在人眼看来会变成一种由红和蓝混合而成的颜色。人眼的缺陷意味着我们可以通过欺骗人眼,利用“混合”的方法来获取更多可以表现的颜色,抖动算法就是采用了这一种现象。
我们提供的例程中使用了Floyd-Steinberg 抖动算法-基于错误扩散 (由Robert Floy 和Louis Steinberg在1976年发表)。公式是根据下面的图像的方式进行错误扩散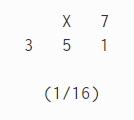
X 就是错误 (原始颜色和灰度值(颜色值)之间的一个标量(矢量)差值),这个错误会向右边,右下, 下边,和左下四个方向扩散, 分别以7/16, 1/16, 5/16和3/16的权重添加到这四个像素点的值中去。感兴趣的用户可以去了解该算法,网络上有很多资源。



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}