

HC-SR04 超声波传感器使用教程
Arduino连接超声波传感器测距
超声波传感器适用于对大幅的平面进行静止测距。普通的超声波传感器测距范围大概是2cm-450cm,分辨率3mm(测试环境没那么好,个人实测比较稳定的距离10cm-2m左右,超过此距离就经常有偶然不准确的情况发生了,当然不排除技术问题。)
测试对象是SRF-04超声波传感器,有四个脚:5v电源脚(Vcc),触发控制端(Trig),接收端(Echo),地端(GND)
模块使用方法:
使用本模块,占用单片机的两个IO口,一个IO口做为触发端。一个IO口做为回波PWM信号捕捉引脚。写程序时,先在TXD引脚端为8个40K周期电平,程序处理变换成一个PWM的信号从RXD引脚输出,一旦检测到有回波信号则输出回响信号,供我们方便使用。我们使用时,只需读出的低电平时间(T)。回响信号是一个脉冲的宽度成正比的距离对象。可通过发射信号到收到的回响信号时间间隔可以计算得到距离。公式: uS/58=厘米或者uS/148=英寸。也可以通过声波在空气中传播公式L=340T/2。就可以求出L(测量的距离)。如果没有检测到回响信号,模块回响信号脚将输出约140uS的电平,以防止发射信号对回响信号的影响。
模块工作原理:
采用IO触发测距,给至少10us的高电平信号;
模块自动发送8个40HKz的方波,自动检测是否有信号返回;
有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间,测试距离=(高电平时间*声速(340m/s))/2
电路连接方法: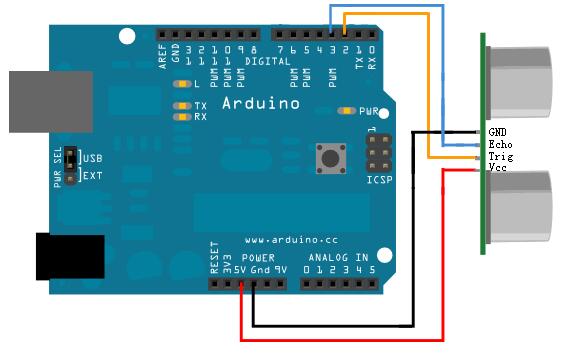
Arduino程序例子:

