OAK系列AI摄像头





【产品简介】
[] OAK-D-S2、12MP、OpenCV AI 机器视觉套件、深度测量、图像识别
【产品详情】
OAK-D-S2
OpenCV AI 机器视觉套件
深度测量 / 图像识别定位 / 安防监控
智能驾驶 / 机器人 / 物体追踪

[] OAK 是嵌入式、高性能、3D AI+CV 平台,由开源硬件、固件、软件生态系统组成,提供完整并可立即使用的嵌入式 3D 人工智能 + 硬件加速的计算机视觉。
[] OAK-D-S2 是 OAK-D 的紧凑版,功能、性能、镜头与 OAK-D 一样,但尺寸更小、质量更轻,可应用在空间有限、对质量有要求的场景。另外,与 OAK-D 相比,结构上 OAK-D-S2 移去了 5V 电源孔,性能上拥有比 OAK-D 更大的深度测量范围。
[] OAK-D-S2 是 Series 2 系列的产品,Series 2 系列产品是将 VPU(Myriad X)直接放在电路板上,而不是放在 SoM 上。这使得产品更小,更轻。这款 OAK 产品结合了深度感知,目标检测(神经推理)和目标跟踪,并以简单易用的 Python API 来帮助你实现这些功能。包括三个机载摄像头(一颗 4k/30fps 彩色摄像头,两颗黑白双目摄像头)和 BNO086 IMU 以及 USB3 接口,你可以在普通计算机、树莓派和其他流行的嵌入式主机上通过 usb 接口访问 OAK。

【产品参数】
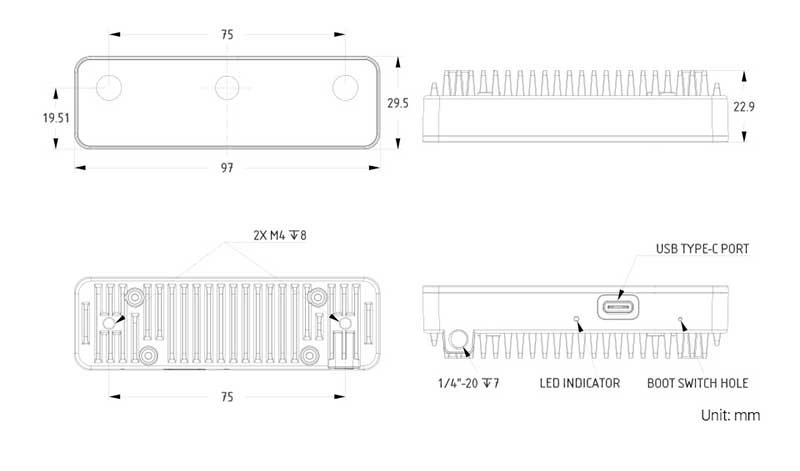
深度测量范围 0.2 ~ 35 米 深度相机 100 万像素,全局快门 RGB 相机 1200 万像素 最大帧率 60fps (RGB 摄像头),120fps (深度摄像头) AI 芯片 Intel Myriad X 4TOPS 算力 视频推流 4K 30 帧 H.265 推流 接口 USB3.0 Type-C NN 平台支持 全平台支持 功耗 2W ~ 5.5W 开发语言 Python, C++ 外壳材质 金属磨砂外壳 机身重量 91g
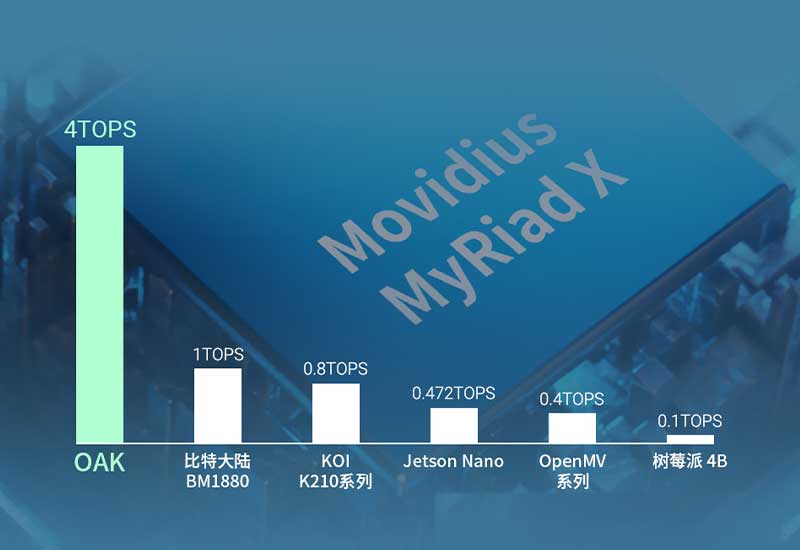
强劲算力
OAK 的算力达到惊人的 4TOPS
是 OpenMV 的 10 倍,树莓派 4B 的 40 倍
高清相机

参数 RGB 相机 双目相机 图像传感器 IMX378 OV9282 视场角 81°D / 69°H / 55°V 89°D / 80°H / 55°V 分辨率 12MP (4032×3040) 1MP (1280×800) 最大帧率 60 FPS 120 FPS 焦距 4.81 2.35 光圈 2.0 2.2 对焦范围 AF:8cm ~ ∞ FF:19.6cm ~ ∞ 镜头尺寸 1/2.3'' 1/4'' 畸变 < 1.0% < 1.5% 像素大小 1.55µm × 1.55µm 3µm × 3µm 快门 卷帘快门 全局快门
| 参数 | RGB 相机 | 双目相机 |
|---|---|---|
| 图像传感器 | IMX378 | OV9282 |
| 视场角 | 81°D / 69°H / 55°V | 89°D / 80°H / 55°V |
| 分辨率 | 12MP (4032×3040) | 1MP (1280×800) |
| 最大帧率 | 60 FPS | 120 FPS |
| 焦距 | 4.81 | 2.35 |
| 光圈 | 2.0 | 2.2 |
| 对焦范围 | AF:8cm ~ ∞ | FF:19.6cm ~ ∞ |
| 镜头尺寸 | 1/2.3'' | 1/4'' |
| 畸变 | < 1.0% | < 1.5% |
| 像素大小 | 1.55µm × 1.55µm | 3µm × 3µm |
| 快门 | 卷帘快门 | 全局快门 |
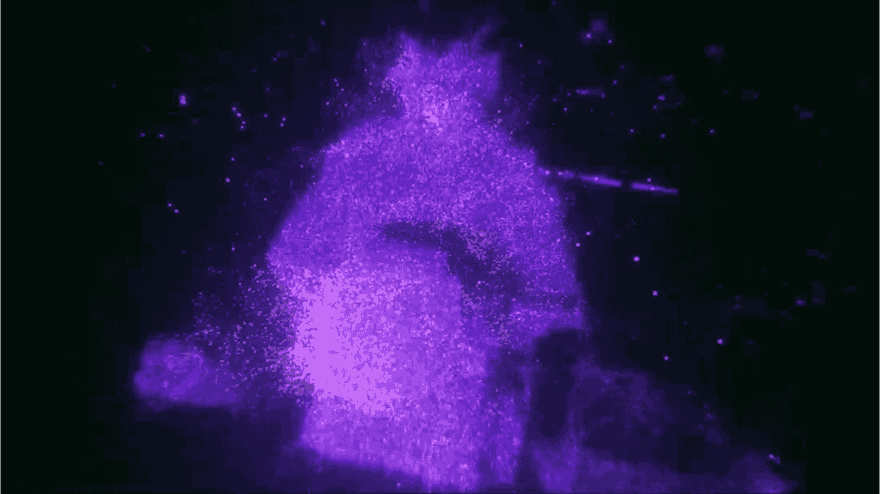
立体视觉
感知真实的 3D 世界,赋予机器人一双慧眼

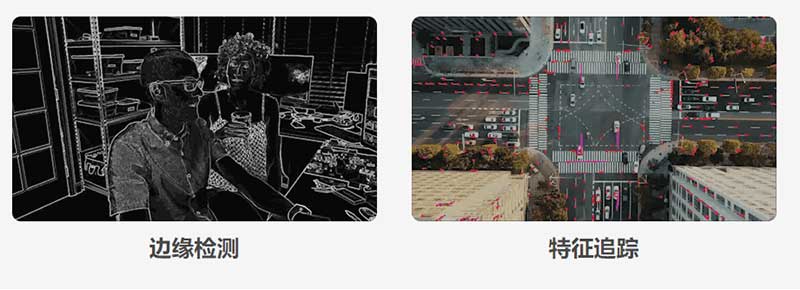
计算机视觉
在芯片上实时处理数据,对主机性能要求低
人工智能
在设备上直接运行神经网络模型,还可部署你自己的模型到 OAK 上

强兼容性
常见的平台、编程语言、神经网络框架几乎都支持
(官方计划支持 Java,正在进行中)
小身躯,大力量
4TOPS 算力的核心芯片内置深度测量、神经网络推理加速、OpenCV 图像处理加速等功能。开发环境一键安装,并且具有类似于树莓派的开源硬件、海量国内外应用案例和免费的工业级神经网络预训练模型,用户可以快速设计出自己的产品

4TOPS 算力的核心芯片内置深度测量、神经网络推理加速、OpenCV 图像处理加速等功能。开发环境一键安装,并且具有类似于树莓派的开源硬件、海量国内外应用案例和免费的工业级神经网络预训练模型,用户可以快速设计出自己的产品
支持摄像头支架