树莓派WAVEGO PRO 12四足机器狗颜色识别ESP32 ESP-NOW
¥1599
制造商:斑梨电子
SKU:021006800000
发布时间:2025-08-06 14:53
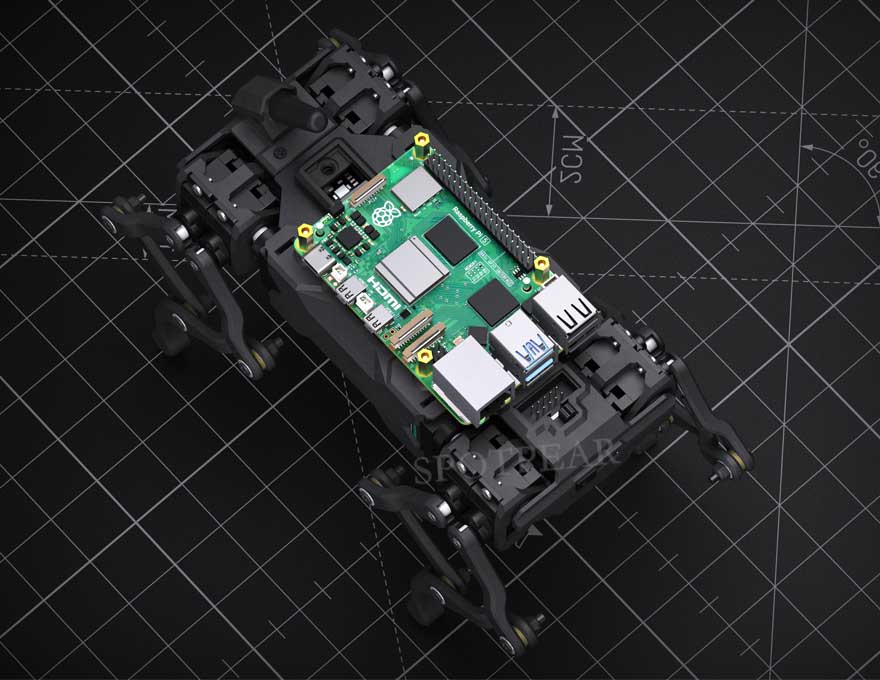
WAVEGO PRO 12 自由度仿生四足机器狗 基于 ESP32 和树莓派开源 支持 ESP-NOW 主从机控制模式
WAVEGO PRO
升级版 高自由度仿生四足机器狗
下位机基于 ESP32,上位机基于树莓派 4B / 树莓派 5 主板设计
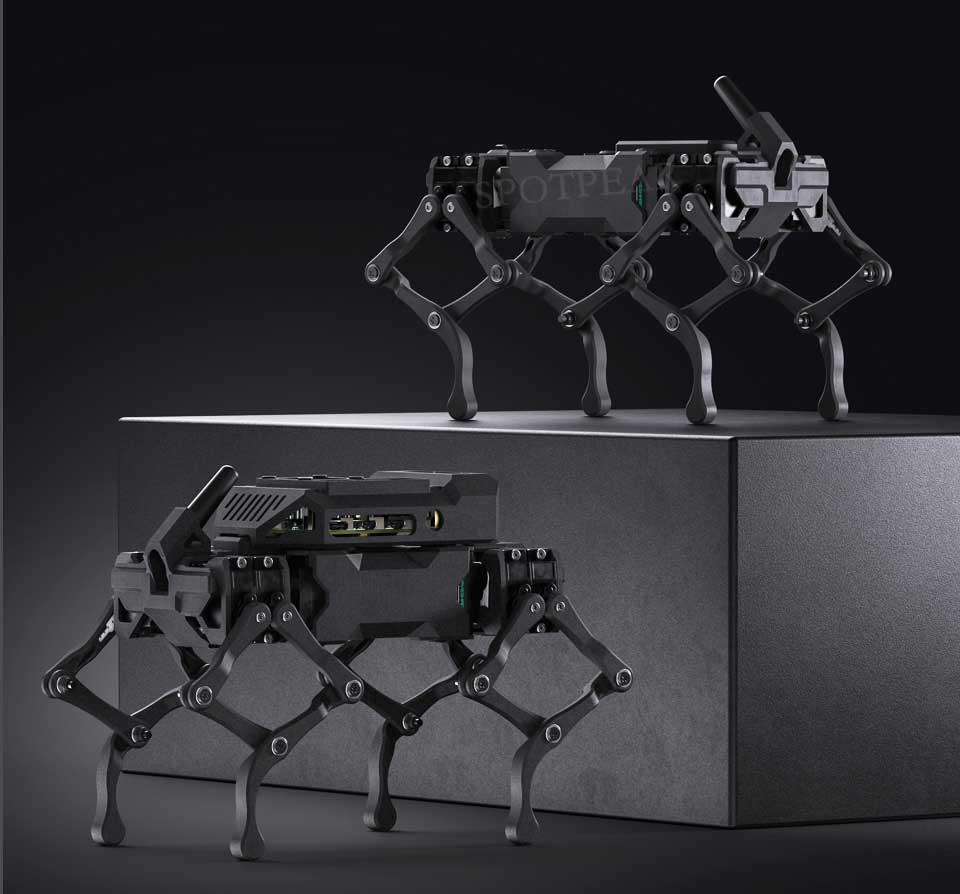

本产品是一款具有高自由度的仿生四足机器狗,2.3kg.cm 串行总线舵机,结构可靠、动作灵活丰富,集成了 9 轴运动跟踪器、RGB 等设备于一身并开源了可跨平台使用的 Web 应用。以 ESP32 作为下位机进行连杆逆解和步态生成,为上位机分担算力,可以安装树莓派 4B / 树莓派 5 作为上位机来运算高阶决策,升级版 WAVEGO Pro 还集成了超广角镜头,可以实现颜色跟踪、运动检测和人脸检测等视觉功能。新增了支持 JSON 协议通信与 ESP-NOW 主从机控制模式,可以将用于机器人控制的 JSON 指令保存为任务文件,通过调用任务文件一键回放机器狗的运动轨迹,便于教育展示与快速演示。
产品特性
- 整机 12 个自由度,腿部多连杆结构设计,增大了舵机的有效力矩
- 采用 2.3kg.cm 串行总线舵机,可实时反馈位置、速度及输入电压等信息
- 一个实时操作系统作为下位机用于步态生成和连杆逆解,为上位机分担算力负担并提升步态解算效率
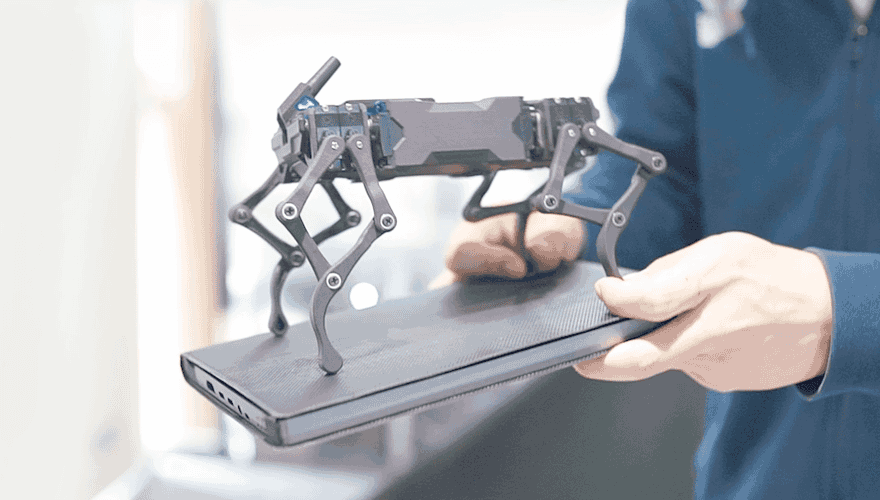
- 超紧凑的结构设计,可以在桌面使用,结构使用铝合金 + 惠普尼龙材质,减轻重量的同时也保证了结构强度
- 可扩展树莓派作为上位机使用,可使用 OpenCV 相关的高阶功能,例程包含人脸检测、运动检测及颜色追踪等功能。为二次开发预留了扩展接口,并配有丰富的使用文档和二次开发文档
树莓派 5 代主控板
CPU 和 GPU 性能大幅提升,芯片新升级,
具有更丰富的多媒体性能、更出色的连接性

高自由度 动作更灵活
整机 12 个自由度,采用多连杆腿部结构 + 逆运动学算法,
可大幅提升舵机有效扭矩

超紧凑结构设计
结构件由 5052 铝合金和 PA12 尼龙件组成,结构坚固可靠,
全身各关节共使用 40 套轴承,减轻重量的同时也保证了结构强度

姿态自平衡
内置高精度 9 轴运动跟踪器 ICM20948
能够适应各种地形环境、控制自身平衡
500 万像素 160 度广视角*
可使用人脸识别 / 颜色追踪 / 运动检测等基于 OpenCV 开发的功能
* 仅升级版和 PI5 套餐版含有此像素和广视角

登录 Web 就可远程控制
不需要手动配置编译环境,开机自动建立 Wi-Fi 热点,
可使用手机或电脑浏览器连接并登录到控制页面,不需要下载 app

可记录动作 一键演示回放
机器狗可以将控制机器人的 JSON 指令保存为任务文件,
任务文件保存在 ESP32 的 Flash 中,掉电后不会丢失,
机器狗可以通过调用这些任务文件来执行复杂的重复操作

高阶功能开发
可以安装树莓派 4B / 树莓派 5 作为上位机通过串口与下位机通信,
ESP32 作为下位机可以分担大部分连杆逆解和步态生成的算力,
留给树莓派更多的资源用于高阶功能开发
高度集成的扩展板
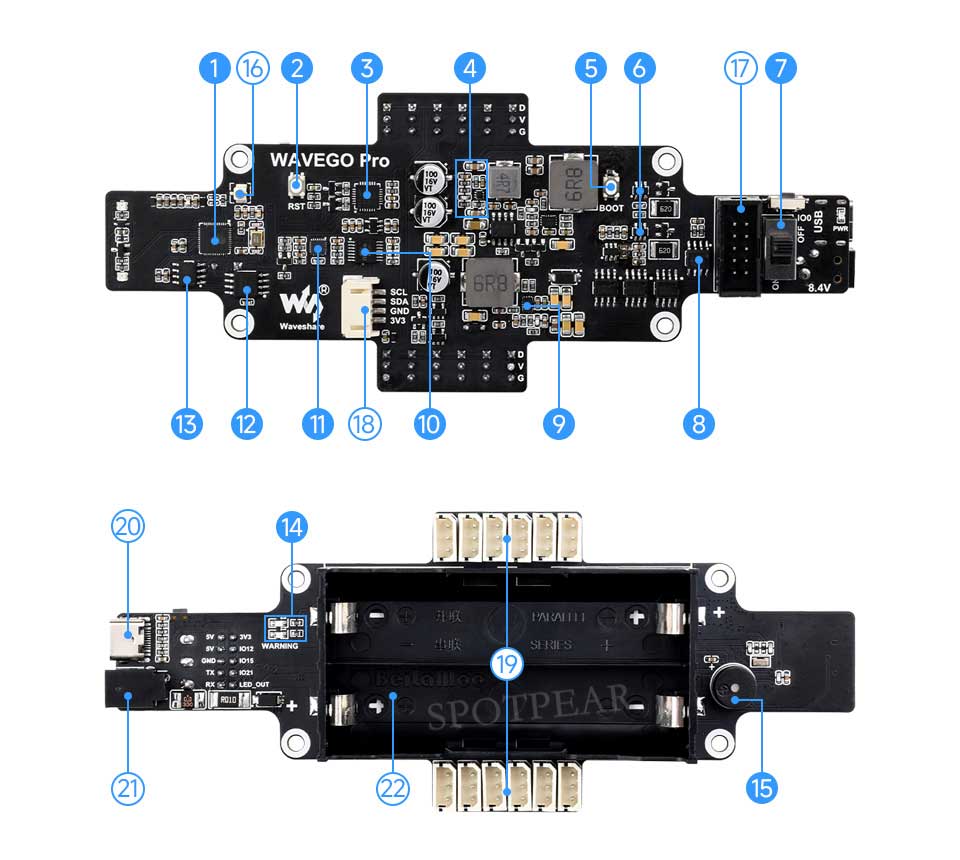
器件介绍
- ESP32-D0WDQ6-V3 主控芯片
- 复位按键
- CP2102 USB 转 UART 芯片
- MP1658GTF-Z 电源芯片
- 电池唤醒按键
- 可充电锂电池管理和平衡芯片
- 电池供电回路开关
- IN219 电压电流监测 IC
- 舵机总电源 IC
- 信号电平转换 IC
- ICM20948 九轴传感器
- W25Q32JVSSIQ 闪存芯片
- ESP-PSRAM64H 闪存芯片
- 电池反接指示灯
- 直插有源蜂鸣器 9*5 3.3V
接口介绍
- IPEX 天线座子
- 2*5 简易牛角座
- OLED PH2.0 接口
- SC09 总线舵机接口
- USB 通讯接口
- 充电接口 / 电源插座 DC-023
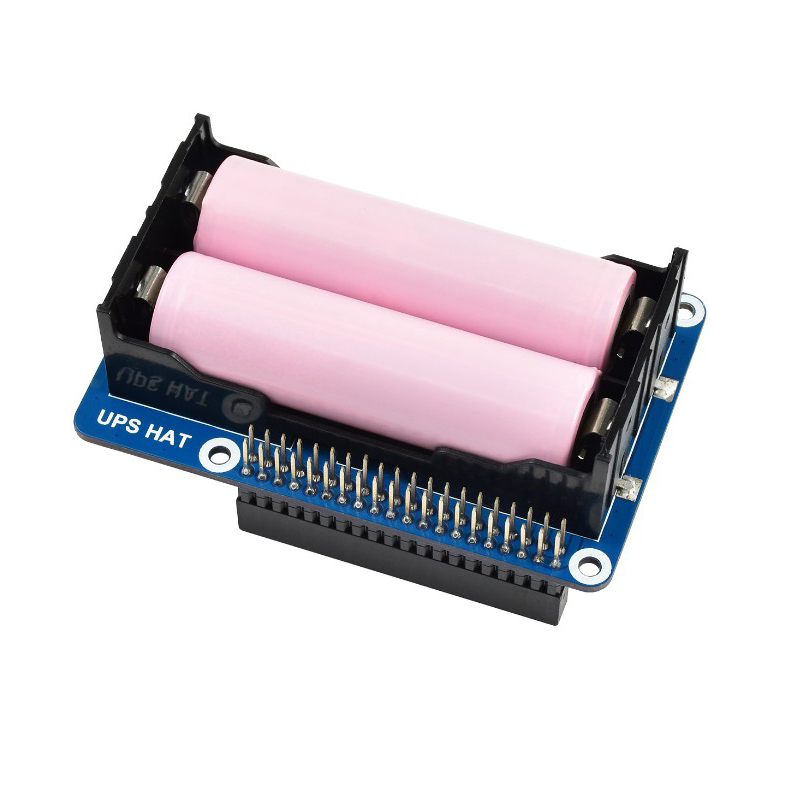
- 18650 可充电锂电池座
资源简介
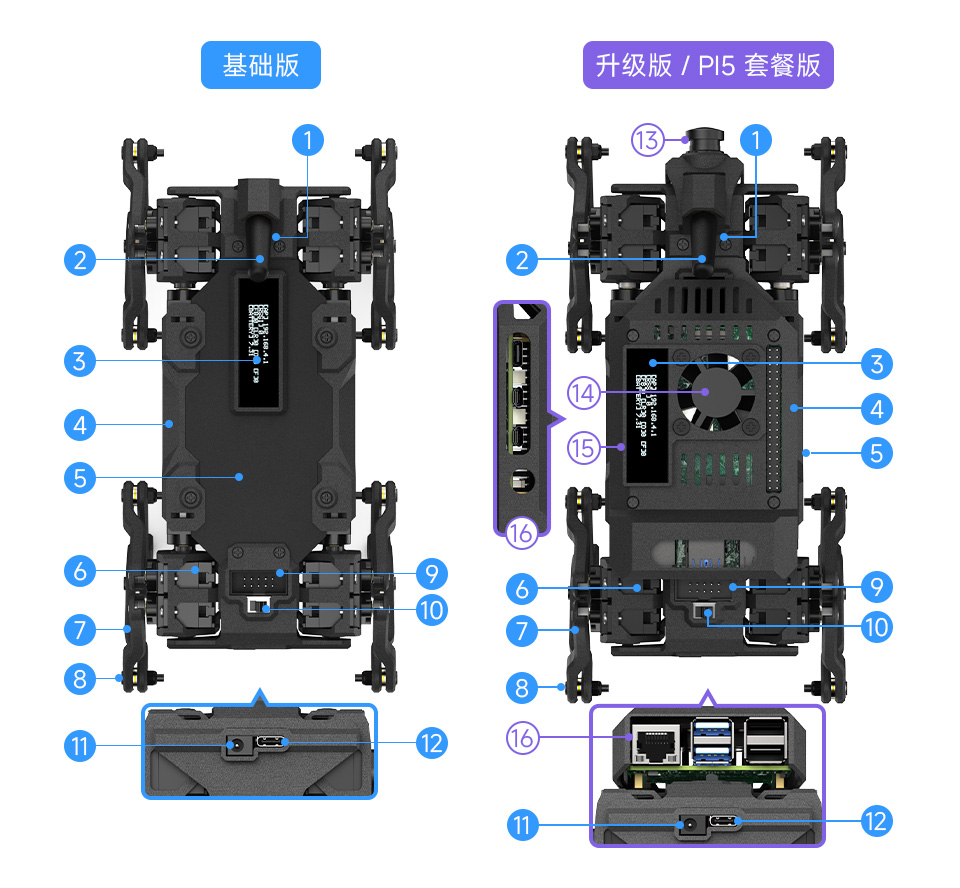
- RGB 指示灯 (内部)
- 外接天线
- 0.96 寸 OLED 屏幕
- PA12 尼龙材质侧面板
- 铝合金外壳
- 大扭矩舵机
- 多连杆腿部结构
- 腿部关节采用平面推力轴承加法兰轴承方式连接,动作可靠
- 多功能扩展接口
- 开关
- 充电接口
- Type-C 接口:下载程序 / 通信
- 超广角摄像头
- 散热风扇
- 树莓派外壳
- 树莓派扩展接口
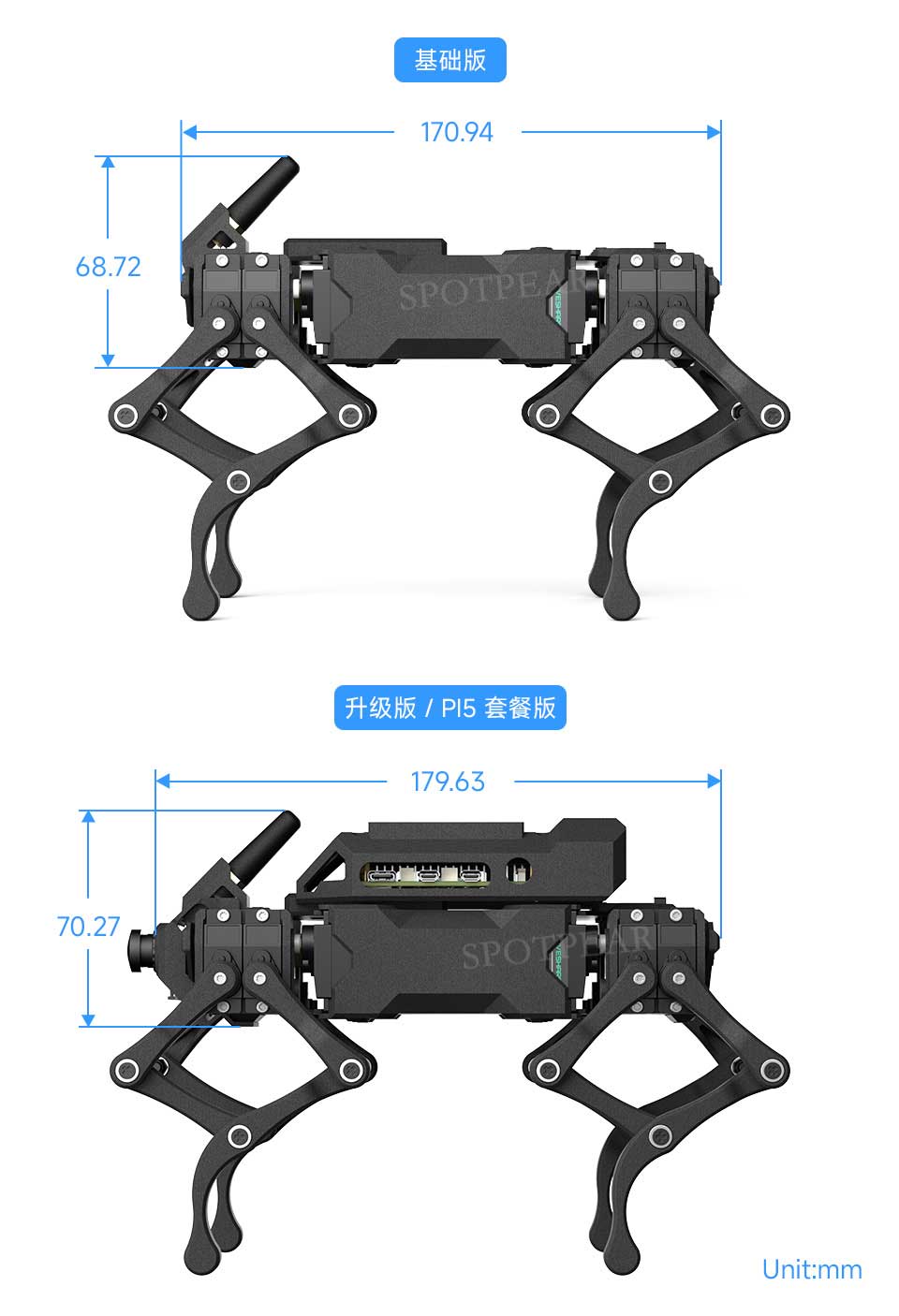
外形尺寸