

NanoPC-T6教程
1 Introduction
The NanoPC-T6 (as “T6”) is an open-sourced mini IoT gateway device with two 2.5G and one Gbps Ethernet ports, designed and developed by FriendlyElec.It is integrated with a Rockchip RK3588 CPU, 4GB/8GB/16GB LPDDR4x RAM and 32GB/64GB/256GB eMMC flash. It supports booting with TF cards and works with operating systems such as FriendlyWrt etc.
The NanoPC-T6 has rich hardware resources with a compact PCB size of 110*80mm. FriendlyElec has released a carefully-designed custom CNC housing for it. It has two HDMI-Out port and one HDMI-In port. It works with Android, Debian Desktop and Ubuntu etc and works with headless systems as well. It supports decoding 8K60 H.265/VP9 formatted videos.
The NanoPC-T6 has one USB3.0 port and one USB C port.
All in all, the NanoPC-T6 is a board featured with multiple Ethernet ports, light NAS and video playing. It is a cannot-miss platform with infinite possibilities for geeks, fans and developers.
2 Hardware Spec
- SoC: Rockchip RK3588
- CPU: Quad-core ARM Cortex-A76(up to 2.4GHz) and quad-core Cortex-A55 CPU (up to 1.8GHz)
- GPU: Mali-G610 MP4, compatible with OpenGLES 1.1, 2.0, and 3.2, OpenCL up to 2.2 and Vulkan1.2
- VPU: 8K@60fps H.265 and VP9 decoder, 8K@30fps H.264 decoder, 4K@60fps AV1 decoder, 8K@30fps H.264 and H.265 encoder
- NPU: 6TOPs, supports INT4/INT8/INT16/FP16
- RAM: 64-bit 4GB/8GB/16GB LPDDR4X at 2133MHz
- Flash: 32GB/64GB/256GB eMMC, at HS400 mode
- microSD: support up to SDR104 mode
- Ethernet: 2x PCIe 2.5G Ethernet
- 4G LTE: one mimiPCIe connector and one microSIM slot
- USB-A: 1x USB 3.0 Type-A
- USB-C: 1x Full function USB Type‑C™ port, support DP display up to 4Kp60, USB 3.0
- Video input:
- 1x Standard HDMI input port, up to 4Kp60
- 2x 4-lane MIPI-CSI, compatible with MIPI V1.2
- Video output:
- 2x Standard HDMI output ports
- compatible with HDMI2.1, HDMI2.0, and HDMI1.4 operation
- one support displays up to 7680x4320@60Hz, another one support up to 4Kp60
- Support RGB/YUV(up to 10bit) format
- 2x 4-lane MIPI-DSI, compatible with MIPI DPHY 2.0 or CPHY 1.1
- 2x Standard HDMI output ports
- Audio:
- 3.5mm jack for stereo headphone output
- 2.0mm PH-2A connector for analog microphone input
- GPIO:
- 40-pin 2.54mm header connector
- up to 2x SPIs, 6x UARTs, 1x I2Cs, 8x PWMs, 2x I2Ss, 28x GPIOs
- M.2 Connectors
- one M.2 M-Key connector with PCIe 3.0 x4 for NVMe SSDs up to 2,500 MB/s
- one M.2 E-key connector with PCIe 2.1 x1 and USB2.0 Host
- others:
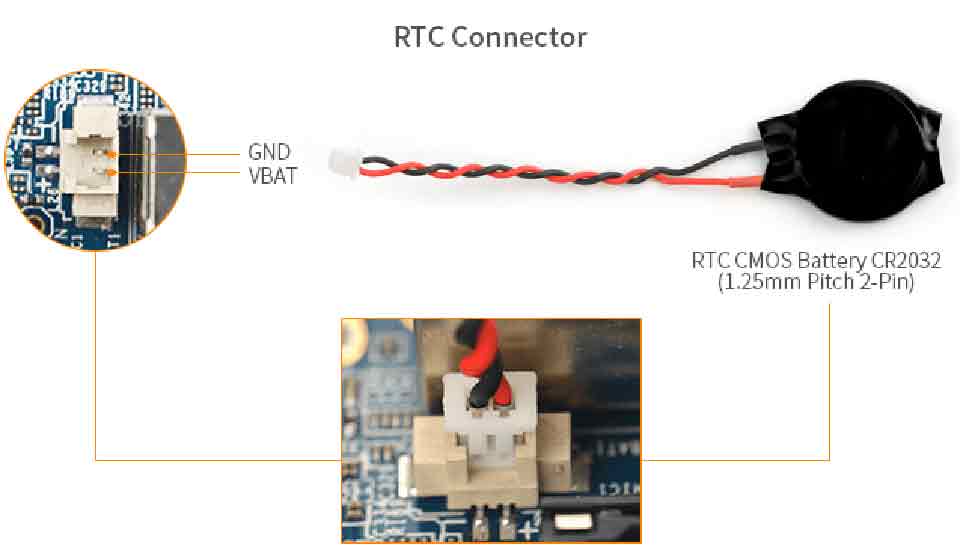
- 2 Pin 1.27/1.25mm RTC battery input connector for low power RTC IC HYM8563TS
- one 38Khz IR receiver
- MASK button for eMMC update, reset button, and Power button
- one 5V Fan connector
- Debug UART, 3-Pin 2.54mm header, 3.3V level, 1500000bps
- 2 x GPIO Controlled LED (SYS, LED1)
- Power supply: 5.5*2.1mm DC Jack, 12VDC input.
- PCB: 8 Layer, 110x80x1.6mm
- Ambient Operating Temperature: 0℃ to 70℃
3 Diagram, Layout and Dimension
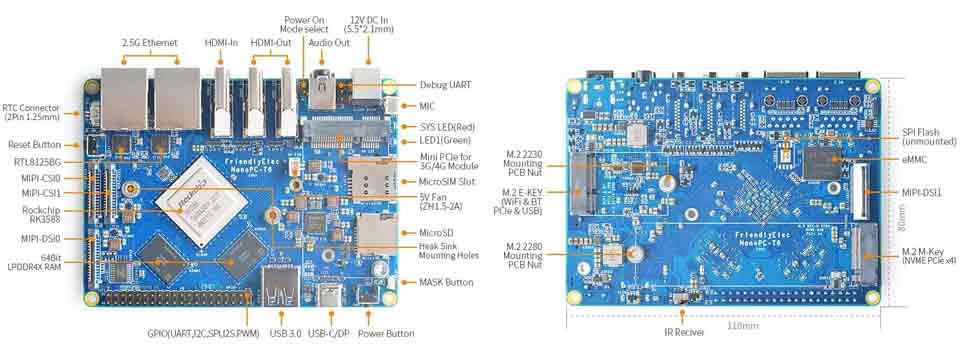
3.1 Layout
- 40-pin GPIO
Pin# GPIO SPI UART I2C I2S PWM POWER Description 1,17 VCC3V3_SYS_S3 3.3V Power Output, 500mA Max 2,4 VCC_5V0 5V Power Output, 500mA Max 6,9,14,20,25,30,34,39 GND Power and Signal Ground 3 GPIO1_D7 I2C8_SDA_M2 pulled up to 3.3V with 2.2K on T6 5 GPIO1_D6 I2C8_SCL_M2 pulled up to 3.3V with 2.2K on T6 7 GPIO3_B2 I2S2_SDI_M1 3.3V 8 GPIO0_C5 UART0_TX_M0 PWM4_M0 3.3V 10 GPIO0_C4 UART0_RX_M0 3.3V 11 GPIO3_C2 PWM14_M0 3.3V 12 GPIO3_B7 3.3V 13 GPIO3_C3 PWM15_IR_M0 3.3V 15 GPIO1_A7 3.3V 16 GPIO3_B3 I2S2_SDO_M1 3.3V 18 GPIO3_B4 I2S2_MCLK_M1 3.3V 19 GPIO1_B2 SPI0_MOSI_M2 UART4_RX_M2 3.3V 21 GPIO1_B1 SPI0_MISO_M2 3.3V 22 GPIO1_B5 SPI0_CS1_M0 UART7_TX_M2 3.3V 23 GPIO1_B3 SPI0_CLK_M2 UART4_TX_M2 3.3V 24 GPIO1_B4 SPI0_CS0_M2 UART7_RX_M2 3.3V 26 GPIO1_B0 3.3V 27 GPIO1_A0 UART6_RX_M1 3.3V 28 GPIO1_A1 UART6_TX_M1 3.3V 29 GPIO3_B5 UART3_TX_M1 I2S2_SCLK_M1 PWM12_M0 3.3V 31 GPIO3_B6 UART3_RX_M1 I2S2_LRCK_M1 PWM13_M0 3.3V 32 GPIO0_C6 PWM5_M1 3.3V 33 GPIO3_B0 PWM9_M0 3.3V 35 GPIO3_A0 SPI4_MISO_M1 I2S3_MCLK PWM10_M0 3.3V 36 GPIO3_A3 SPI4_CS0_M1 UART8_RX_M1 I2S3_SDO 3.3V 37 GPIO3_A4 SPI4_CS1_M1 I2S3_SDI 3.3V 38 GPIO3_A1 SPI4_MOSI_M1 I2S3_SCLK 3.3V 40 GPIO3_A2 SPI4_CLK_M1 UART8_TX_M1 I2S3_LRCK 3.3V
- MIPI-DSI
- 0.5mm FPC Connector
Pin# MIPI-DSI0 MIPI-DSI1 Description 1,2,3 VCC_5V0 VCC_5V0 5V Power ouput 4,7,9,11,15,18,21,24,27,30 GND GND Power and Signal Ground 5 I2C5_SDA_M0 I2C4_SDA_M3 3.3V, I2C Data, pulled up to 3.3V with 2.2K on T6 6 I2C5_SCL_M0 I2C4_SCL_M3 3.3V, I2C Clock, pulled up to 3.3V with 2.2K on T6 8 GPIO3_C0 GPIO4_A0 3.3V, GPIO 10 GPIO3_B1/PWM2_M1 GPIO3_D5/PWM11_M3 3.3V, GPIO/PWM 12 GPIO3_A6 GPIO4_A3 3.3V, GPIO 13 /NC /NC No Connection 14 GPIO3_C1 GPIO4_A1 3.3V, GPIO 16 MIPI_DPHY0_TX_D3N MIPI_DPHY1_TX_D3N MIPI TX Lane3 ouput N 17 MIPI_DPHY0_TX_D3P MIPI_DPHY1_TX_D3P MIPI TX Lane3 ouput P 19 MIPI_DPHY0_TX_D2N MIPI_DPHY1_TX_D2N MIPI TX Lane2 ouput N 20 MIPI_DPHY0_TX_D2P MIPI_DPHY1_TX_D2P MIPI TX Lane2 ouput P 22 MIPI_DPHY0_TX_D1N MIPI_DPHY1_TX_D1N MIPI TX Lane1 ouput N 23 MIPI_DPHY0_TX_D1P MIPI_DPHY1_TX_D1P MIPI TX Lane1 ouput P 25 MIPI_DPHY0_TX_D0N MIPI_DPHY1_TX_D0N MIPI TX Lane0 ouput N 26 MIPI_DPHY0_TX_D0P MIPI_DPHY1_TX_D0P MIPI TX Lane0 ouput P 28 MIPI_DPHY0_TX_CLKN MIPI_DPHY1_TX_CLKN MIPI TX Clock ouput N 29 MIPI_DPHY0_TX_CLKP MIPI_DPHY1_TX_CLKP MIPI TX Clock ouput P
- MIPI-CSI
- 0.5mm FPC Connector
Pin# MIPI-CSI0 MIPI-CSI1 Description 1,2 VCC_5V0 VCC_5V0 5V Power ouput 3,13,15,18,21,24,27,30 GND GND Power and Signal Ground 4,5,7 /NC /NC No Connection 6 VCC_1V8_S3 VCC_1V8_S3 1.8V Power ouput, 100mA Max 8 VSYNC_MASTER VSYNC_SLAVE Have been Connected together on T6 for sensor synchronization 9 I2C3_SCL_M0 I2C7_SCL_M0 1.8V, I2C Clock, pulled up to 1.8V with 2.2K on T6 10 I2C3_SDA_M0 I2C7_SDA_M0 1.8V, I2C Data, pulled up to 1.8V with 2.2K on T6 11 GPIO4_C4 GPIO2_C1 1.8V, GPIO 12 GPIO4_C5 GPIO2_C2 1.8V, GPIO 14 MIPI_CAM1_CLKOUT MIPI_CAM2_CLKOUT 1.8V, CLock ouput for Sensor 16 MIPI_CSI0_RX_D3P MIPI_CSI1_RX_D3P MIPI RX Lane3 iuput P 17 MIPI_CSI0_RX_D3N MIPI_CSI1_RX_D3N MIPI RX Lane3 iuput N 19 MIPI_CSI0_RX_D2P MIPI_CSI1_RX_D2P MIPI RX Lane2 iuput P 20 MIPI_CSI0_RX_D2P MIPI_CSI1_RX_D2N MIPI RX Lane2 iuput N 22 MIPI_CSI0_RX_D1P MIPI_CSI1_RX_D1P MIPI RX Lane1 iuput P 23 MIPI_CSI0_RX_D1N MIPI_CSI1_RX_D1N MIPI RX Lane1 iuput N 25 MIPI_CSI0_RX_CLK0P MIPI_CSI1_RX_CLK0P MIPI RX Clock iuput P 26 MIPI_CSI0_RX_CLK0N MIPI_CSI1_RX_CLK0N MIPI RX Clock iuput N 28 MIPI_CSI0_RX_D0P MIPI_CSI1_RX_D0P MIPI RX Lane0 iuput P 29 MIPI_CSI0_RX_D0N MIPI_CSI1_RX_D0N MIPI RX Lane0 iuput N
- Debug UART Pin Spec
- 3.3V level signals, 1500000bps
Pin# Assignment Description 1 GND 0V 2 UART2_TX_M0_DEBUG output 3 UART2_RX_M0_DEBUG intput
- About Power
- Power supply via 5.5*2.1mm DC Jack. 5V~20V, 12V is recommended.
- Power Output Capacity
Port Max Output Port Max Output USB-A 3.0 5V/2A USB-C/DP 5V/2A M.2 M-Key 3.3V/3A M.2 E-Key 3.3V/3A MIPI-CSI0 5V/0.5A MIPI-CSI1 5V/0.5A MIPI-DSI0 5V/1A MIPI-DSI1 5V/1A GPIO 5V/0.5A, 3.3V/0.5A miniPCIe 3.3V/3A Total 35W
- RTC
- RTC backup current is 0.25μA TYP (VDD =3.0V, TA =25℃).
- Connector P/N: Molex 53398-0271
- IR receiver
- Connected to PWM3_IR_M0
- 38Khz carrier frequency
- compatible with NEC protocol, User code is 3B4C
- Support FriendlyELEC RC100 IR controller
4 Get Started
4.1 Essentials You Need
Before starting to use your NanoPC-T6 get the following items ready
- NanoPC-T6
- MicroSD Card/TF Card: Class 10 or Above, minimum 8GB SDHC
- A DC 12V/2A power
- If you need to develop and compile,you need a computer that can connect to the Internet. It is recommended to install Ubuntu 20.04 64-bit system and use the following script to initialize the development environment, or use docker container:
4.2 TF Cards We Tested
Refer to:
SanDisk 32GB TF(MicroSD)
SanDisk 32GB TF(MicroSD)
SanDisk TF 8G Class10 microSD
SanDisk TF 128G Class10 microSDXC TF 128G 48MB/S
4.3 Configure parameters for serial port
Use the following serial parameters:
| Baud rate | 1500000 |
| Data bit | 8 |
| Parity check | None |
| Stop bit | 1 |
| Flow control | None |
4.4 Install OS
4.4.1 Flash to TF
Visit download link to download image files (in the "01_Official images/01_SD card images" directory) and utilities (in the "05_Tools" directory):
| Image Files | |
| rk3588-sd-friendlywrt-21.02-YYYYMMDD.img.gz | FriendlyWrt lite image file, based on OpenWrt 21.02, kernel version 5.10.y |
| rk3588-sd-friendlywrt-21.02-docker-YYYYMMDD.img.gz | FriendlyWrt with Docker image file, based on OpenWrt 21.02, kernel version 5.10.y |
| rk3588-sd-friendlywrt-22.03-YYYYMMDD.img.gz | FriendlyWrt lite image file, based on OpenWrt 22.03, kernel version 5.10.y |
| rk3588-sd-friendlywrt-22.03-docker-YYYYMMDD.img.gz | FriendlyWrt with Docker image file, based on OpenWrt 22.03, kernel version 5.10.y |
| rk3588-sd-androidtv-YYYYMMDD.img.zip | Android 12 TV |
| rk3588-sd-android12-YYYYMMDD.img.zip | Android 12 Tablet |
| rk3588-sd-debian-bullseye-core-5.10-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Core, no desktop environment, command line only, kernel version 5.10.y |
| rk3588-sd-debian-bullseye-minimal-5.10-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Desktop, Uses LXDE as default desktop, no pre-installed recommended software, supports hardware acceleration, kernel version 5.10.y |
| rk3588-sd-debian-bullseye-desktop-5.10-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Desktop, Uses LXDE as default desktop, pre-installed mpv, smplayer and chromium brower, supports hardware acceleration, kernel version 5.10.y |
| rk3588-sd-ubuntu-jammy-desktop-arm64-YYYYMMDD.img.gz | Ubuntu 22.04 with GNOME and Wayland, pre-installed web browser and other recommended software, kernel version 5.10.y |
| rk3588-sd-ubuntu-jammy-minimal-arm64-YYYYMMDD.img.gz | Lightweight Ubuntu 22.04 with GNOME and Wayland, recommended software is not included, kernel version 5.10.y |
| rk3588-sd-friendlycore-focal-5.10-arm64-YYYYMMDD.img.gz | 64-bit FriendlyCore Lite image file based on Ubuntu core 20.04 64bit, kernel version 5.10.y |
| Other Image | |
| Github Actions | |
| Flash Utility: | |
| win32diskimager.rar | Windows utility. Under Linux users can use "dd" |
The detailed steps are as follows:
- Get an 8G SDHC card and backup its data if necessary;
- Download and extract the xxx.img.gz and win32diskimager;
- Run the win32diskimager utility under Windows as administrator. On the utility's main window select your SD card's drive, the wanted image file and click on "write" to start flashing the SD card. Under Linux run "dd" to flash the rkXXXX-sd-OSNAME-YYYYMMDD.img file to your SD card;
- Take out the SD and insert it to NanoPC-T6's microSD card slot;
- Power on NanoPC-T6 and it will be booted from your TF card;
4.4.2 Install OS to eMMC
4.4.2.1 Option 1: Install OS on Web Page
Get a TF card which has been installed with FriendlyWrt, log in FriendlyWrt on the web page, click on “System” ->”eMMC Tools”. Click on “Select file” to select your wanted image file, either an official image (the name might start with “rk3588-sd”) or a third party image. The file should be a “.gz” or “.img” file.
After a file is selected, click on “Upload and Write” to start installing an OS.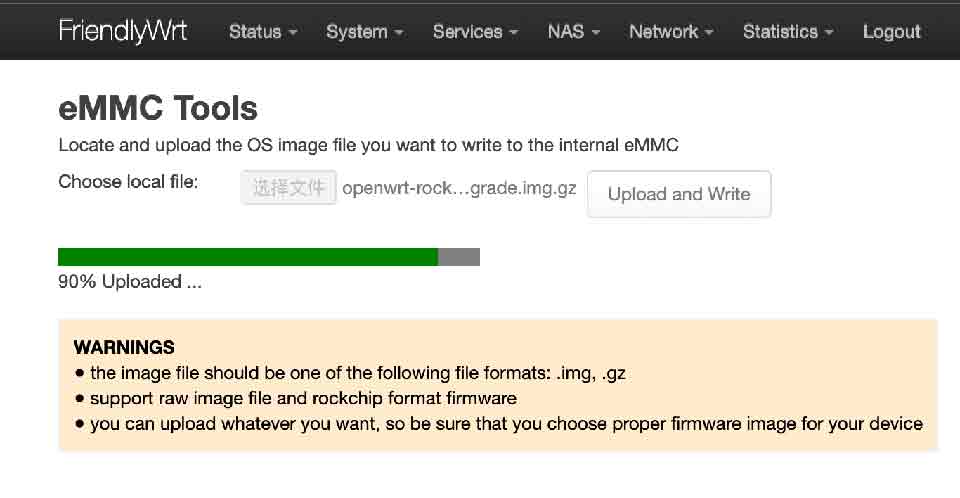
After installation is done, eject the SD card, the system will automatically reboot and load the OS from eMMC. After the OS begins to load, if the system LED is flashing and the network LED is on, it means the the OS has loaded successfully. If the OS is FriendlyWrt, you can click on “Go to Homepage” to enter the homepage.
Note that if you are burning the FriendlyElec firmware, you need to use an image file with the "-sd-" file name, similar to the one below:
| rk3588-sd-friendlywrt-21.02-YYYYMMDD.img.gz |
| rk3588-sd-friendlywrt-21.02-docker-YYYYMMDD.img.gz |
| rk3588-sd-friendlywrt-22.03-YYYYMMDD.img.gz |
| rk3588-sd-friendlywrt-22.03-docker-YYYYMMDD.img.gz |
If the file is in 7z, zip or rar format, you will need to extract it first. If the file is too large to write, you can compress it into .gz format and try again.
4.4.2.2 Option 2: Install OS via TF Card
4.4.2.2.1 Install OS to eMMC
- This method firstly boots a mini Linux from a TF card and then automatically runs an EFlasher utility to install the OS to eMMC.
- You can connect your system to an HDMI monitor and watch its progress. This is optional. You can watch its progress by observing its LEDs as well.
Visit download link to download the needed utilities and image file:
| Image File | |
| rk3588-eflasher-friendlywrt-21.02-YYYYMMDD.img.gz | FriendlyWrt Based on OpenWrt 21.02 Kernel version 5.10.y |
| rk3588-eflasher-friendlywrt-21.02-docker-YYYYMMDD.img.gz | FriendlyWrt Pre-installed Docker Based on OpenWrt 21.02 Kernel version 5.10.y |
| rk3588-eflasher-friendlywrt-22.03-YYYYMMDD.img.gz | FriendlyWrt Based on OpenWrt 22.03 Kernel version 5.10.y |
| rk3588-eflasher-friendlywrt-22.03-docker-YYYYMMDD.img.gz | FriendlyWrt Pre-installed Docker Based on OpenWrt 22.03 Kernel version 5.10.y |
| rk3588-eflasher-debian-bullseye-core-5.10-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Core No desktop environment, command line only Kernel version 5.10.y |
| rk3588-eflasher-debian-bullseye-minimal-5.10-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Desktop Uses LXDE as default desktop No pre-installed recommended software Supports hardware acceleration Kernel version 5.10.y |
| rk3588-eflasher-debian-bullseye-desktop-5.10-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Desktop Uses LXDE as default desktop Pre-installed mpv, smplayer and chromium brower Supports hardware acceleration Kernel version 5.10.y |
| rk3588-eflasher-androidtv-YYYYMMDD.img.zip | Android TV |
| rk3588-eflasher-android12-YYYYMMDD.img.zip | Android 12 (Tablet) |
| rk3588-eflasher-ubuntu-jammy-desktop-arm64-YYYYMMDD.img.gz | Ubuntu 22.04 with GNOME and Wayland Pre-installed web browser and other recommended software kernel version 5.10.y |
| rk3588-eflasher-ubuntu-jammy-minimal-arm64-YYYYMMDD.img.gz | Lightweight Ubuntu 22.04 with GNOME and Wayland Recommended software is not included kernel version 5.10.y |
| rk3588-eflasher-friendlycore-focal-5.10-arm64-YYYYMMDD.img.gz | 64-bit FriendlyCore Lite image file based on Ubuntu core 20.04 64bit, kernel version 5.10.y |
| Flash Utility: | |
| win32diskimager.rar | Windows utility. Under Linux users can use "dd" |
Here are the steps:
- Get an SDHC card with a minimum capacity of 8G
- Download a rk3588-eflasher-OSNAME-YYYYMMDD.img.gz image file and a win32diskimager;
- Under Windows, run win32diskimager as administrator, select your SD card and extracted EFlasher image file, and click on “Write” to write image file on the SD card; or under Linux, you use the dd command to write the rk3588-eflasher-OSNAME-YYYYMMDD.img file to the SD card.
- Eject your SD card and insert it to NanoPC-T6’s microSD card slot.
- Turn on NanoPC-T6, it will boot from the SD card and automatically run EFlasher to install the OS to the board’s eMMC. You connect your board to an HDMI monitor or observer the board’s LEDs to watch its installation progress
Progress | SYS LED(Red) |
|---|---|
Power On | Solid On |
System Boot | Slow Flashing |
Installation in Progress | Fast Flashing |
Installation Done | Slow Flashing |
- After installation is done, power off the board, eject the SD card from NanoPC-T6, power on the board again, NanoPC-T6 will load the OS from its eMMC
4.4.2.2.2 Install Flash Image File to eMMC
- Auto Install (Default Behavior)
1) Download an “eflasher” firmware from network drive, extract it and install it to a TF card ;
2) Eject and insert the TF card to your PC, after a “FriendlyARM” device shows up(Under Linux, it is a “FriendlyARM” directory), copy an .img or .gz file to the TF card.
3) Open the eflasher.conf file on the TF card, set “autoStart=” to the name of your image file, such as:
autoStart=openwrt-rockchip-armv8_nanopi-ext4-sysupgrade.img.gzAnyone of the files that contain “-sd-” will work. Here is a list:
| rk3588-sd-friendlywrt-22.03-YYYYMMDD.img.gz |
| rk3588-sd-friendlywrt-22.03-docker-YYYYMMDD.img.gz |
| rk3588-sd-friendlywrt-21.02-YYYYMMDD.img.gz |
| rk3588-sd-friendlywrt-21.02-docker-YYYYMMDD.img.gz |
| rk3588-sd-ubuntu-jammy-desktop-5.10-arm64-20221029.img.gz |
4) Eject the TF card, insert the TF card to NanoPC-T6, power it on it will automatically install your firmware. You can watch the installation progress by observing the LEDs’ status.
- Disable Auto Installation
If you want to disable auto installation, please open the eflasher.conf file, set “autoStart=” to empty:
autoStart=In this case, after the system boots, it will stay at the step where you are expected to select an image file. You need to connect an HDMI monitor and a USB mouse to your board and install a firmware on its UI;
4.4.2.3 Option 3: Install OS via USB
4.4.2.3.1 Step 1: Install USB Driver and Tools/Utilities
Download a driver file DriverAssitant_v5.1.1.zip under the “tools” directory from network drive, extract and install it.
Under the same directory, download a utility RKDevTool_Release_v2.84.zip and extract it.
4.4.2.3.2 Step 2: Connect NanoPC-T6 to PC and Enter Installation Mode
1) Disconnect the connected USB cable and the power cord from NanoPC-T6, eject the TF card;
2) Press and hold the “Mask” key, power on the board. After the status LED has been on for at least 3 seconds, release the Mask key.
3) Use a USB C-to-A cable, connect NanoPC-T6 to a PC.
4.4.2.3.3 Step 3: Install image to eMMC
A firmware in general is packaged in either of the two options: the first is an whole image (ie, update.img) which is often offered by third party developers, the second is that an image is packaged and placed in multiple partition images. FriendlyElec offers an image in the latter option.
- Option 1: Install whole image (ie, update.img)
On a PC which has the extracted RKDevTool_Release_v2.84 utility, go to the RKDevTool_Release_v2.84 directory, run the RKDevTool.exe file. If everything works, you will see a “Found a new Maskrom device” message on the utility;
Go to “Upgrade Firmware(升级固件)”, click on “Firmware(固件)”, select your wanted image file, and click on “Upgrade(升级)” to install. After installation is done, your board will reboot automatically and load the system from eMMC;
- Option 2: Install OS that is packaged & placed in multiple partition images
Go to network drive to download your needed package and extract it.
| Image File | |
| rk3588-usb-friendlywrt-21.02-YYYYMMDD.img.gz | FriendlyWrt Based on OpenWrt 21.02 Kernel version 5.10.y |
| rk3588-usb-friendlywrt-21.02-docker-YYYYMMDD.img.gz | FriendlyWrt Pre-installed Docker Based on OpenWrt 21.02 Kernel version 5.10.y |
| rk3588-usb-friendlywrt-22.03-YYYYMMDD.img.gz | FriendlyWrt Based on OpenWrt 22.03 Kernel version 5.10.y |
| rk3588-usb-friendlywrt-22.03-docker-YYYYMMDD.img.gz | FriendlyWrt Pre-installed Docker Based on OpenWrt 22.03 Kernel version 5.10.y |
| rk3588-usb-debian-bullseye-core-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Core No desktop environment, command line only Kernel version 5.10.y |
| rk3588-usb-debian-bullseye-minimal-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Desktop Uses LXDE as default desktop No pre-installed recommended software Supports hardware acceleration Kernel version 5.10.y |
| rk3588-usb-debian-bullseye-desktop-arm64-YYYYMMDD.img.gz | Debian 11(Bullseye) Desktop Uses LXDE as default desktop Pre-installed mpv, smplayer and chromium brower Supports hardware acceleration Kernel version 5.10.y |
| rk3588-usb-androidtv-YYYYMMDD.img.zip | Android TV |
| rk3588-usb-android12-YYYYMMDD.img.zip | Android 12 (Tablet) |
| rk3588-usb-ubuntu-jammy-desktop-arm64-YYYYMMDD.img.gz | Ubuntu 22.04 with GNOME and Wayland Pre-installed web browser and other recommended software kernel version 5.10.y |
| rk3588-usb-ubuntu-jammy-minimal-arm64-YYYYMMDD.img.gz | Lightweight Ubuntu 22.04 with GNOME and Wayland Recommended software is not included kernel version 5.10.y |
| rk3588-usb-friendlycore-focal-5.10-arm64-YYYYMMDD.img.gz | 64-bit FriendlyCore Lite image file based on Ubuntu core 20.04 64bit, kernel version 5.10.y |
After it is extracted, you will see some utilities and a configuration file under the directory. double click on RKDevTool.exe, you will see a “Found a new Maskrom device” message on the utility. Click on the “Execute”, wait a moment and it will be installed. After installation is done your system will automatically reboot and load the system from eMMC.
4.5 The Boot order between eMMC and SD card
By default, the system will be booted from the TF card first, but this is not the case under all conditions. This section will explain all situations in detail;
Refer to rockchip official document (1), there are two types of loader program:
1) U-Boot TPL/SPL (i.e. upsream U-Boot, also called mainline U-Boot)
2) Rockchip MiniLoader
Things to note:
1) FriendlyELEC's image uses Rockchip MiniLoader
2) The third-party image usually uses U-Boot TPL/SPL
The following situations will always start from eMMC:
If the system in the eMMC, or the system in the TF card uses the first Loader type U-Boot TPL/SPL, it will always boot from the eMMC;
If you want to boot from the TF card, there are the following methods:
Method 1: Clear the Loader on the eMMC, the clearing method is as follows, after starting from the eMMC, enter the following command on the command line to clear the Loader on the eMMC:
dd if=/dev/zero of=/dev/mmcblk2 bs=8M count=1
Method 2: Insert the TF card, Press Maskrom Key (or short-circuit the Maskrom contacts) and then power on (need to keep the short-circuit for about 3 seconds), it will start from the TF card
The summary is as follows:
| eMMC current system | TF card current system | Boot priority |
|---|---|---|
| No system | Any image | TF card |
| FriendlyELEC's image | FriendlyELEC's image | TF card |
| FriendlyELEC's image | Image with Mainline U-boot | eMMC |
| Image with Mainline U-boot | FriendlyELEC's image | eMMC |
| Image with Mainline U-boot | Image with Mainline U-boot | eMMC |
5 Work with FriendlyWrt
5.1 Introduction to FriendlyWrt
FriendlyWrt is a customized system made by FriendlyElec based on an OpenWrt distribution. It is open source and well suitable for developing IoT applications, NAS applications etc.
5.2 First boot
For the first boot, the system needs to do the following initialization work:
1)Extended root file system
2)Initial setup(will execute /root/setup.sh)
So you need to wait for a while (about 2~3 minutes) to boot up for the first time, and then set FriendlyWrt, you can enter the ttyd terminal on the openwrt webpage, when the prompt is displayed as root@FriendlyWrt, it means the system has been initialized.
root@FriendlyWrt
5.3 Account & Password
The default password is password (empty password in some versions). Please set or change a safer password for web login and ssh login. It is recommended to complete this setting before connecting NanoPC-T6 to the Internet.
5.4 Login FriendlyWrt
Connect the PC to the LAN port of NanoPC-T6. If your PC without a built-in ethernet port, connect the LAN port of the wireless AP to the LAN port of NanoPC-T6, and then connect your PC to the wireless AP via WiFi , Enter the following URL on your PC's browser to access the admin page:
- http://friendlywrt/
- http://192.168.2.1/
- http://[fd00:ab:cd::1]
The above is the LAN port address of NanoPC-T6. The IP address of the WAN port will be dynamically obtained from your main router through DHCP.
5.5 Recommended security settings
The following settings are highly recommended to complete before connecting NanoPC-T6 to the Internet。
- Set a secure password
- Only allow access to ssh from lan, change the port
- Only allow local devices to access luci
Edit /etc/config/uhttpd,Change the original 0.0.0.0 and [::] addresses to the local lan address, for example:
# HTTP listen addresses, multiple allowed list listen_http 192.168.2.1:80 list listen_http [fd00:ab:cd::1]:80 # HTTPS listen addresses, multiple allowed list listen_https 192.168.2.1:443 list listen_https [fd00:ab:cd::1]:443
Restart the service:
/etc/init.d/uhttpd restart
- Check the firewall settings
Set up as you wish.
5.6 Change LAN IP in LuCI
1) Click on Network → Interfaces, then click on the Edit button of the LAN Network;
2) In General Setup tab, input new IP address (for example: 192.168.11.1), click "Save" and then click "Save & Apply";
3) On the pop-up window with the title “Connectivity change“, click "Apply and revert on connectivity loss";
4) Wait a moment, enter the new address in your computer's browser and login to FriendlyWrt;
5.7 Safe shutdown operation
Enter the "Services" -> "Terminal", enter the "poweroff" command and hit enter, wait until the led light is off, and then unplug the power supply.
5.8 Soft Factory Reset
Enter "System"->"Backup/Flash firmware",Click “Perform reset“ Button, Your device's settings will be reset to defaults like when FriendlyWrt was first installed.
You can also do this in the terminal:
firstboot && reboot5.9 Install Software Packages
5.9.1 Set up openwrt official opkg source
sed -i -e 's/mirrors.cloud.tencent.com/downloads.openwrt.org/g' /etc/opkg/distfeeds.conf opkg update
5.9.2 Update Package List
Before install software packages update the package list:
$ opkg update
5.9.3 List Available Packages
$ opkg list
5.9.4 List Installed Packages
$ opkg list-installed
5.9.5 Install Packages
$ opkg install <package names>
5.9.6 Remove Packages
$ opkg remove <package names>
5.10 Disable IPv6
. /root/setup.sh disable_ipv6 reboot
5.11 Configure the function of the user button
By default, the user button is configured to reboot the device, as shown below:
echo 'BTN_1 1 /sbin/reboot' >> /etc/triggerhappy/triggers.d/example.conf
You can change its behavior by changing the configuration file above.
5.12 Configuring Quectel EC20 (4G module) dial-up networking
- Go to "Network" -> "Interfaces"
- Click "Delete" next to "WAN6", then click "Save & Apply"
- Click "Edit" next to "WAN", in the "Device" drop-down menu, select "Ethernet Adapter: wwan0", in the "Protocol" drop-down menu, select "QMI Cellular" and click "Switch Protocol"
- Click the "Modem Device" drop-down menu, select "/dev/cdc-wdm0", fill in the APN information (e.g. for China Mobile, enter "cmnet")
- Click "Save" to close the dialog, Finally, click "Save & Apply" at the bottom of the page to initiate the dial-up process
- Devices connected to LAN will have access to the Internet, If your device has a WiFi module, you can enable wireless AP functionality on the "Wireless" page and connect to the Internet via devices connected wirelessly
5.13 Some common issues of FriendlyWrt
- Unable to dial up
- Go to "Network" -> "Firewall" and set "Inbound Data", "Outbound Data" and "Forwarding" in "WAN Zone" to "Accept";
- If you still cannot access the Internet, you can try to turn off IPV6;
- Dial-up successful, but no outgoing traffic
- Go to "Services" -> "Terminal" and type "fw4 reload" to try to reload the firewall settings again;
- Unable to power on
- Try to replace the power adapter and cable. It is recommended to use a power supply with specifications above 5V/2A;
- Note that some fast chargers with Type-C interface will have a delay, it may take a few seconds to start providing power;
- When doing secondary routing, the computer cannot connect to the Internet
- If your main network is IPv4, and NanoPC-T6 works in IPv6, the computer may not be able to connect to the Internet. It is recommended to turn off IPv6 (the method is described later in this WiKi), or switch the main route to IPv6;
- If you have questions or have better suggestions, please send an email to techsupport@friendlyarm.com;
5.14 Use USB2LCD to view IP and temperature
Plug the USB2LCD module to the USB interface ofNanoPC-T6 and power on, the IP address and CPU temperature will be displayed on the LCD:
5.15 How to use USB WiFi
5.15.1 Check USB WiFi Device with Command Line Utility
(1) Click on "services>ttyd" to start the command line utility
(2) Make sure no USB devices are connected to your board and run the following command to check if any USB devices are connected or not
lsusb
(3) Connect a USB WiFi device to the board and run the command again
lsusb
You will see a new device is detected. In our test the device's ID was 0BDA:C811
(4) Type your device's ID (in our case it was "0BDA:C811" or "VID_0BDA&PID_C811") in a search engine and you may find a device that matches the ID. In our case the device we got was Realtek 8811CU.
5.15.2 Configure a USB WiFi Device as AP
(1) Connect a USB WiFi device to the NanoPC-T6. We recommend you to use the following devices: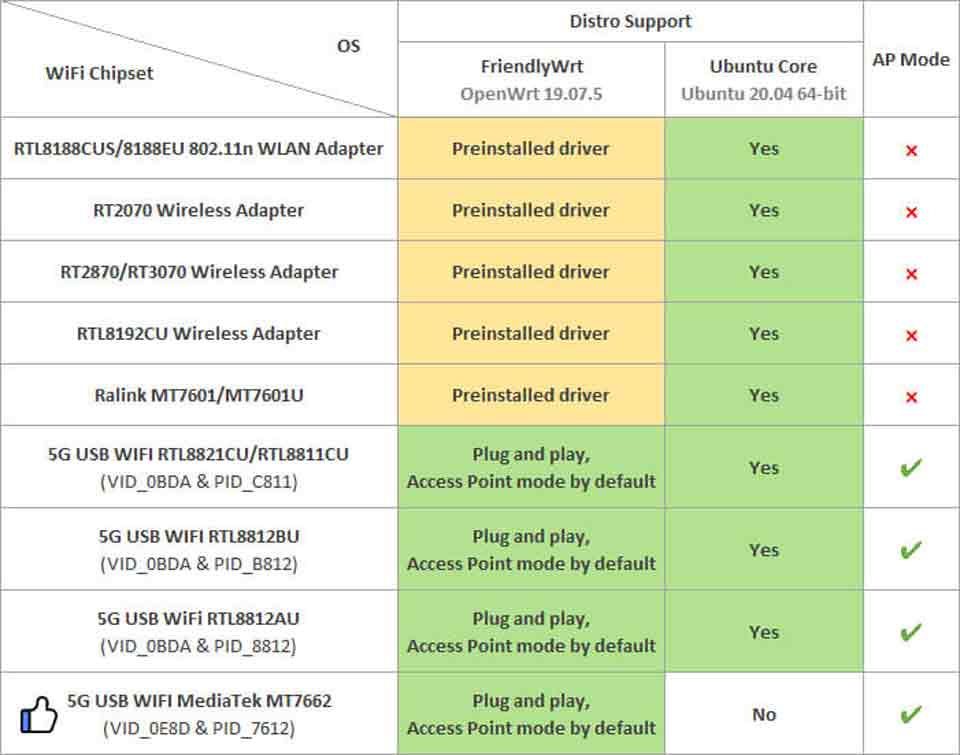
Note: devices that match these VID&PIDs would most likely work.
(2) Click on "System>Reboot" and reboot your NanoPC-T6
(3) Click on "Network>Wireless" to enter the WiFi configuration page
(4) Click on "Edit" to edit the configuration
(5) On the "Interface Configuration" page you can set the WiFi mode and SSID, and then go to "Wireless Security" to change the password. By default the password is "password". After you make your changes click on "Save" to save
(6) After you change the settings you can use a smartphone or PC to search for WiFi
5.15.3 Common USB WiFi issues
1) It is recommended to plug in the usb wifi in the off state, then power it on, FriendlyWrt will automatically generate the configuration file /etc/config/wireless, if not, see if there is wlan0 by ifconfig -a, if there is no wlan0, usually there is no driver.
2) If ifconfig -a sees wlan0, but the hotspot is not working properly, try changing the channel and country code, an inappropriate country code can also cause the WiFi to not work.
3) Some USB WiFis (e.g. MTK MT7662) work in CD-ROM mode by default and need to be switched by usb_modeswitch, you can try to add usb_modeswitch configuration to the following directory: /etc/usb_modeswitch.d.
5.15.4 Change the default WiFi hotspot configuration
FriendlyWrt sets the country, hotspot name and other parameters for USB WiFi by default, with the aim of being as plug-and-play as possible, but this does not guarantee that all modules will be compatible with this setting, you can change these behaviors by modifying the following file:
/lib/wifi/mac80211.sh
5.16 Work with Docker Applications
5.16.1 Work with Docker: Install JellyFin
mkdir -p /jellyfin/config mkdir -p /jellyfin/videos docker run --restart=always -d -p 8096:8096 -v /jellyfin/config:/config -v /jellyfin/videos:/videos jellyfin/jellyfin:10.1.0-arm64 -name myjellyfin
After installation, visit port 8096 and here is what you would find:
5.16.2 Work with Docker: Install Personal Nextcloud
mkdir /nextcloud -p docker run -d -p 8888:80 --name nextcloud -v /nextcloud/:/var/www/html/ --restart=always --privileged=true arm64v8/nextcloud
After installtion, visit port 8888.
5.16.3 Expand Docker Storage
- Stop docker service first:
/etc/init.d/dockerd stop
- Rename the original /opt directory, create an empty /opt directory:
mv /opt /opt-old && mkdir /opt
- Format your drive as ext4, and mount it to the /opt directory:
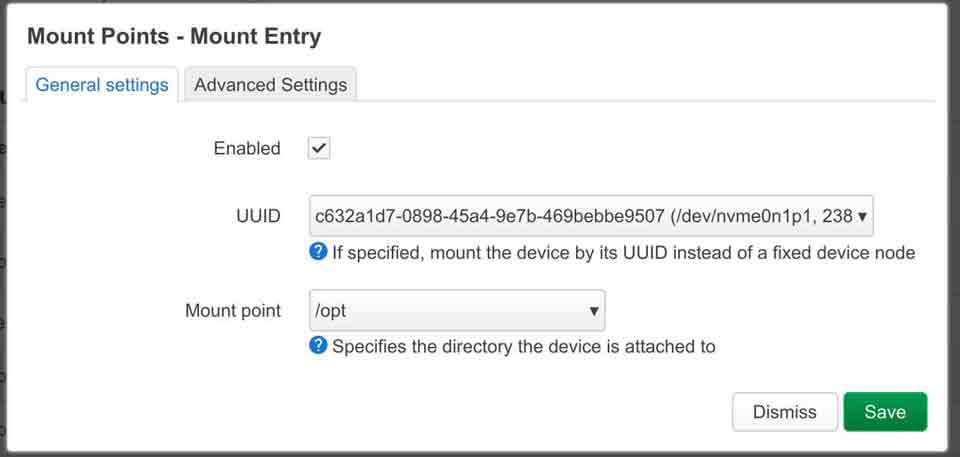
- Enter the command "mount | grep /opt" to check the mount status:
root@FriendlyWrt:~# mount | grep /opt /dev/nvme0n1p1 on /opt type ext4 (rw,relatime) root@FriendlyWrt:~#
- Copy the files from the original /opt directory to the new /opt directory:
cp -af /opt-old/* /opt/ && rm -rf /opt-old
- Reboot the device
reboot
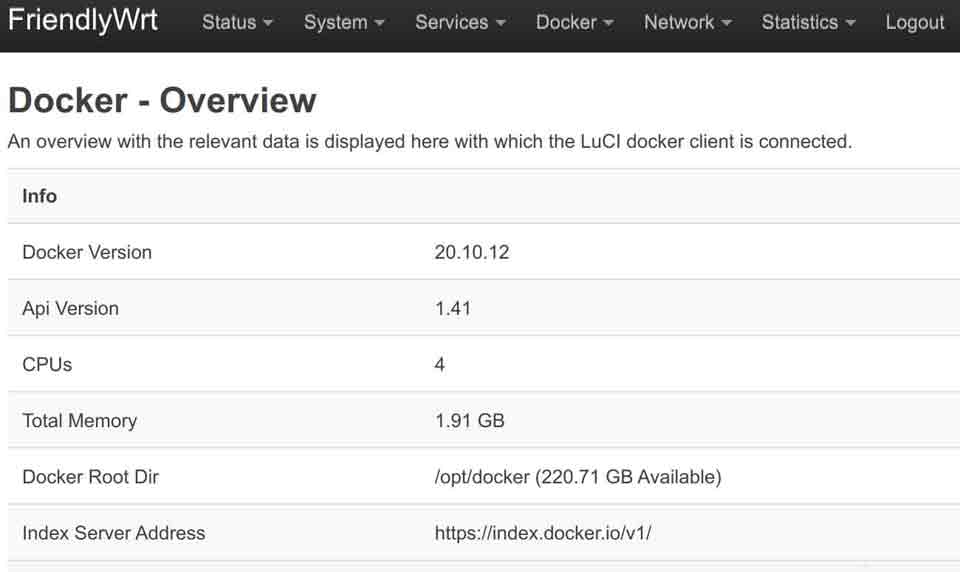
- After reboot, go to the "Docker" -> "Overview" page, check the information in the "Docker Root Dir" line, you can see that the Docker space has been expanded:
5.16.4 Docker FAQ and solutions
5.16.4.1 Unable to access the network services provided by the Docker container
Solution:
- Go to the "Firewall" settings and set "Forwarding" to "Accept";
- Turn off "Software Offload";
5.17 Mount smbfs
mount -t cifs //192.168.1.10/shared /movie -o username=xxx,password=yyy,file_mode=0644
5.18 Use sdk to compile the package
5.18.1 Install the compilation environment
Download and run the following script on 64-bit Ubuntu (version 18.04+): How to setup the Compiling Environment on Ubuntu bionic
5.18.2 Download and decompress sdk from the network disk
The sdk is located in the toolchain directory of the network disk:
tar xvf openwrt-sdk-*-rockchip-armv8_gcc-11.2.0_musl.Linux-x86_64.tar.xz # If the path is too long, it will cause some package compilation errors, so change the directory name here mv openwrt-sdk-*-rockchip-armv8_gcc-11.2.0_musl.Linux-x86_64 sdk cd sdk ./scripts/feeds update -a ./scripts/feeds install -a
5.18.3 Compile the package
download the source code of the example (a total of 3 examples are example1, example2, example3), and copy to the package directory:
git clone https://github.com/mwarning/openwrt-examples.git cp -rf openwrt-examples/example* package/ rm -rf openwrt-examples/
Then enter the configuration menu through the following command:
make menuconfigIn the menu, select the following packages we want to compile (actually selected by default):
"Utilities" => "example1" "Utilities" => "example3" "Network" => "VPN" => "example2"
execute the following commands to compile the three software packages:
make package/example1/compile V=99 make package/example2/compile V=99 make package/example3/compile V=99
After the compilation is successful, you can find the ipk file in the bin directory, as shown below:
$ find ./bin -name example*.ipk ./bin/packages/aarch64_generic/base/example3_1.0.0-220420.38257_aarch64_generic.ipk ./bin/packages/aarch64_generic/base/example1_1.0.0-220420.38257_aarch64_generic.ipk ./bin/packages/aarch64_generic/base/example2_1.0.0-220420.38257_aarch64_generic.ipk
5.18.4 Install the ipk to NanoPi
You can use the scp command to upload the ipk file to NanoPi:
cd ./bin/packages/aarch64_generic/base/ scp example*.ipk root@192.168.2.1:/root/
Then use the opkg command to install them:
cd /root/ opkg install example3_1.0.0-220420.38257_aarch64_generic.ipk opkg install example1_1.0.0-220420.38257_aarch64_generic.ipk opkg install example2_1.0.0-220420.38257_aarch64_generic.ipk
5.19 Build FriendlyWrt using GitHub Actions
Please refre this link: https://github.com/friendlyarm/Actions-FriendlyWrt
6 Work with Ubuntu 22.04 Desktop
6.1 Introduction to Ubuntu 22.04 Desktop
Ubuntu 22.04 Desktop has the following features:
- Uses GNOME 42 as default desktop;
- Uses Wayland as default display server;
- Mali GPU-based OpenGL ES support;
- Support Rockhip MPP video hard coding and hard decoding;
- Pre-installed mpv and kodi, support video hardware decoding;
- Compatible with Docker and Plex server;
6.2 Account & Password
Regular Account:
User Name: pi
Password: pi
Root:
the root user account is disabled by default, you may configure the root password through the 'sudo passwd root' command.
6.3 View IP address
Since the hostname is FriendlyElec.lan by default, you can use the ping command to get the IP address:
ping FriendlyElec.lan6.4 Connect to Ubuntu via SSH
ssh pi@FriendlyElec.lan
The default password is: pi
6.5 Update Software Packages
$ sudo apt-get update
6.6 Install Ubuntu software center
$ sudo apt-get install snapd $ sudo snap install snap-store
6.7 Install the kernel-header package
sudo dpkg -i /opt/linux-headers-*.deb
try to compile a kernel module:
sudo apt update sudo apt install git gcc make bc git clone https://github.com/RinCat/RTL88x2BU-Linux-Driver.git cd RTL88x2BU-Linux-Driver make -j$(nproc) sudo make install sudo modprobe 88x2bu
6.8 Change time zone
6.8.1 Check the current time zone
timedatectl
6.8.2 List all available time zones
timedatectl list-timezones
6.8.3 Set the time zone (e.g. Shanghai)
sudo timedatectl set-timezone Asia/Shanghai
6.9 Change startup LOGO and Wallpaper
6.9.1 Change startup LOGO
Replace the following two files in the kernel source code directory and recompile the kernel:
kernel/logo.bmp
kernel/logo_kernel.bmp
Or use the script to operate, as shown below:
- Download scripts:
git clone https://github.com/friendlyarm/sd-fuse_rk3588.git -b master cd sd-fuse_rk3588
- Compile kernel and repackage firmware
convert files/logo.jpg -type truecolor /tmp/logo.bmp convert files/logo.jpg -type truecolor /tmp/logo_kernel.bmp LOGO=/tmp/logo.bmp KERNEL_LOGO=/tmp/logo_kernel.bmp ./build-kernel.sh ubuntu-jammy-desktop-arm64 ./mk-emmc-image.sh ubuntu-jammy-desktop-arm64
6.10 Soft Factory Reset
Execute the following command in a terminal:
sudo firstboot && sudo reboot
6.11 Start the program automatically at startup(For example Firefox)
Put the desktop file in the ~/.config/autostart/ directory, for example:
mkdir ~/.config/autostart/ cp /usr/share/applications/firefox.desktop ~/.config/autostart/
6.12 Disable auto-mounting
sudo systemctl mask udisks2 sudo reboot
6.13 Setup Chinese language and Input method
6.13.1 Setup Chinese language
Enter the following command and select 'zh_CN.UTF-8':
sudo dpkg-reconfigure localesAdd environment variables to .bashrc:
echo "export LC_ALL=zh_CN.UTF-8" >> ~/.bashrc echo "export LANG=zh_CN.UTF-8" >> ~/.bashrc echo "export LANGUAGE=zh_CN.UTF-8" >> ~/.bashrc
Reboot device:
sudo reboot6.14 Video playback with hardware decoding
6.14.1 GUI
- Locate the video file in the file browser, right click and select "Play with mpv media player"
- Using Kodi player
- Using Chromium web browser, you can play videos on the web with hardware decoding (limited to the video formats supported by the CPU)
6.14.2 Command line
- Play local video file
export DISPLAY=:0.0 mpv --fs /home/pi/Videos/demo.mp4
- Play web-video
export DISPLAY=:0.0 mpv --fs https://www.youtube.com/watch?v=lK-nYDmC1Dk
6.15 How to Install Plex Media Server
Run the following command to install:
echo deb https://downloads.plex.tv/repo/deb public main | sudo tee /etc/apt/sources.list.d/plexmediaserver.list curl https://downloads.plex.tv/plex-keys/PlexSign.key | sudo apt-key add - sudo apt update sudo apt install plexmediaserver
After successful installation, enable Plex (starts automatically at system startup):
sudo systemctl enable plexmediaserver sudo systemctl start plexmediaserver sudo systemctl status plexmediaserver
After installation, login to Plex server by entering the following address in your computer browser: http://IPAddress:32400/web/
6.16 Install Docker Engine
6.16.1 Install Docker Engine
sudo apt install apt-transport-https ca-certificates curl software-properties-common gnupg lsb-release curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null sudo apt update sudo apt install docker-ce docker-ce-cli containerd.io docker-compose-plugin
Let’s verify:
sudo docker info6.16.2 Run Docker as a non-root user
sudo groupadd docker sudo gpasswd -a ${USER} docker sudo systemctl restart docker sudo chmod a+rw /var/run/docker.sock
Let’s verify:
docker images
6.16.3 Testing Docker: Installing Nextcloud with docker
mkdir ~/nextcloud -p docker run -d -p 8888:80 --name nextcloud -v ~/nextcloud/:/var/www/html/ --restart=always --privileged=true arm64v8/nextcloud
After installation, visit: http://Device-IP-Address:8888 on your computer browser to view the nextcloud web page.
6.17 WiFi Connection
6.17.1 Gui
Click on the icon on the top right in the FriendlyDesktop's main window, select your wanted WiFi hotspot and proceed with prompts
6.17.2 Console
Please visit: Use NetworkManager to configure network settings
6.18 Test OpenGL ES
First, change the CPU governor to performance:
sudo sh -c 'echo performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor' sudo sh -c 'echo performance > /sys/devices/system/cpu/cpufreq/policy4/scaling_governor' sudo sh -c 'echo performance > /sys/devices/system/cpu/cpufreq/policy6/scaling_governor'
Start glmark2-es2-wayland:
glmark2-es2-wayland
6.19 Chromium web browser
6.19.1 GPU
Chromium web browser has enabled hardware acceleration by default, supports WebGL, and can view hardware acceleration details by entering the URL chrome://gpu, as shown below: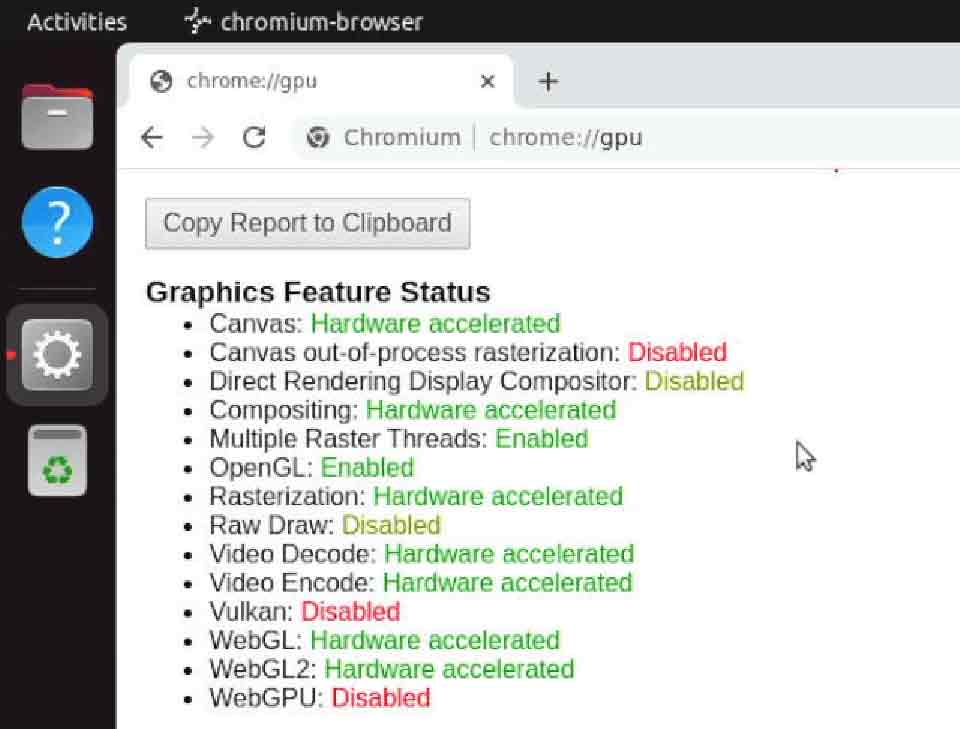
6.19.2 VPU
Play a video in the browser, then use fuser on the command line to view the mpp device node to confirm that the vpu interface is being called:
pi@FriendlyElec:~$ fuser /dev/mpp_service /dev/mpp_service: 3258
If there is no content output from the fuser command, it means software decoding.
7 Work with Android
Android include the following features:
- There are two versions, TV and Tablet;
- Support infrared remote control (only for models with Ir Receiver);
- Support Bluetooth remote control (requires USB or M.2 Bluetooth module);
- Support wired network;
- Support WiFi (requires external USB or M.2 WIFI module);
- Support video hard decoding;

7.1 WiFi models supported by Android
7.1.1 M.2 WiFi Module
- RTL8822CE
7.1.1.1 Usb Dongle
- RTL8821CU (Vid: 0BDA, Pid: C811) (Test sample:TP-Link TL-WDN5200H)
- RTL8812AU (Vid: 0BDA, Pid: 8812)
- MediaTek MT7662 (Vid: 0E8D, Pid: 7612) (Test sample:COMFAST CF-WU782AC V2)
7.2 Bluetooch models supported by Android
7.2.1 Bluetooth Adapters
- RTL8761B (Test sample:UGREEN CM390 Bluetooth 5.0 USB Adapter)
- CSR8510 A10 Bluetooth Dongle 0a12:0001
7.2.2 Bluetooth Remote
- Amazon Fire TV Remote
7.3 How to use ADB
7.3.1 USB connection
Please note: After turning on the ADB, the USB3 port will work in Device mode, if you need to connect a device such as a USB stick, you need to turn off the ADB and restart the board
In general, ADB is disabled by default, please follow the steps below to enable it:
- Connect your development board to your computer using a USB A-to-A data cable, referring to the figure below, be sure to connect it to the USB port closest to the edge:
7.3.2 For Android Tablet
- Go to Settings -> About tablet -> tap the "Build number" at the bottom of the screen 7 times in a row;
- Go to Settings -> System -> Advance -> Developer options, and check the box for USB debugging;
- Reboot
7.3.3 For Android TV
- Click the Settings icon -> Device Preferences -> About -> tap the "Android TV OS build" at the bottom of the screen 7 times in a row;
- Click the Settings icon -> Device Preferences -> Developer options, and check the box for USB debugging;
- Reboot
7.3.4 Using ADB
- Install ADB drivers and commands based on your operating system;
- Normally, the Android status bar will prompt "USB debugging connected", indicating that ADB has been enabled. Enter the following command on your computer to check the connection:
$ adb devices List of devices attached 27f7a63caa3faf16 device
- Enter adb shell:
$ adb shell
nanopi3:/ $7.4 Expanding the Storage Partition
If Android is installed on an SD card, after burning the image to the SD card, do not insert it into the target board and start it up. Instead, execute the following commands on a Linux computer to expand the partition first:
echo "write" | sfdisk /dev/sdX -q --force parted -s /dev/sdX unit % resizepart 14 100 print
Please replace /dev/sdX with the actual device name of your SD card, and 14 with the sequence number of the last partition on your SD card.
If Android is installed on eMMC, you can start a Linux system (such as Ubuntu or Debian) from an SD card and perform the same operation on the eMMC device via the command line. The device name for eMMC is usually /dev/mmcblk2.
If the Android system has already been booted and you need to restore the factory settings after expanding the partition, for example, if the system is an Android tablet, the option to restore factory settings can be found here:
Settings -> System -> Reset options -> Erase all data(factory reset)
Using EFlasher to burn the Android image to eMMC will automatically expand the file system.
7.5 Wired networks on Android
- Any network port can connect to the network via DHCP
- If you want to configure a static IP, only eth0 interface is supported
- Some applications may have compatibility issues and report no network connection error, but the network is actually connected
8 Work with Debian11 Desktop
8.1 Introduction to Debian11 Desktop
Debian11 Desktop is a light-weighted debian desktop system,it has the following features:
- Uses LXDE as default desktop;
- Mali GPU-based OpenGL support;
- Support Rockhip MPP video hard coding and hard decoding;
- Pre-installed mpv and smplayer, both support 4K video hardware decoding;
- Pre-installed Chromium browser, support vpu/gpu hardware acceleration (video hard decoding limited to h264/mp4 format);
- Compatible with Plex Server and Docker;
8.2 Account & Password
Regular Account:
User Name: pi
Password: pi
Root:
the root user account is disabled by default, you may configure the root password through the 'sudo passwd root' command.
8.3 View IP address
Since the Debian Bullseye hostname is the hardware model by default, you can use the ping command to get the IP address:ping NanoPC-T6
8.4 Connect to Debian via SSH
Run the following commandssh pi@NanoPC-T6
The default password is: pi
8.5 Update Software Packages
$ sudo apt-get update
8.6 Install x11vnc Server on Debian for Remote Access
8.6.1 Install x11vnc server
The following command to install x11vnc server:
sudo apt-get install x11vnc
8.6.2 Set your password
sudo x11vnc -storepasswd /etc/x11vnc.pwd
8.6.3 Setup x11vnc server with systemd auto start up
Create service configuration file:
sudo vi /lib/systemd/system/x11vnc.service
Let’s copy and paste the following configuration into our newly create service file:
[Unit] Description=Start x11vnc at startup. Requires=display-manager.service After=syslog.target network-online.target Wants=syslog.target network-online.target [Service] Type=simple ExecStart=/usr/bin/x11vnc -display :0 -forever -loop -noxdamage -repeat -rfbauth /etc/x11vnc.pwd -rfbport 5900 -shared -capslock -nomodtweak ExecStop=/usr/bin/x11vnc -R stop Restart=on-failure [Install] WantedBy=multi-user.target
The following commands to reload the systmd system and to enable and start the x11vnc service:
sudo systemctl daemon-reload sudo systemctl enable x11vnc.service sudo systemctl start x11vnc
8.6.4 Testing remote access
Start the VNC client software, input IP:5900 to connect:
8.7 Install the kernel-header package
sudo dpkg -i /opt/linux-headers-*.deb
try to compile a kernel module:
sudo apt update sudo apt install git gcc make bc git clone https://github.com/RinCat/RTL88x2BU-Linux-Driver.git cd RTL88x2BU-Linux-Driver make -j$(nproc) sudo make install sudo modprobe 88x2bu
8.8 Change time zone
8.8.1 Check the current time zone
timedatectl
8.8.2 List all available time zones
timedatectl list-timezones
8.8.3 Set the time zone (e.g. Shanghai)
sudo timedatectl set-timezone Asia/Shanghai
8.9 Change startup LOGO and Wallpaper
8.9.1 Change startup LOGO
Replace the following two files in the kernel source code directory and recompile the kernel:
kernel/logo.bmp
kernel/logo_kernel.bmp
Or use the script to operate, as shown below:
- Download scripts:
git clone https://github.com/friendlyarm/sd-fuse_rk3588.git -b master --single-branch cd sd-fuse_rk3588
- Compile kernel and repackage firmware
convert files/logo.jpg -type truecolor /tmp/logo.bmp convert files/logo.jpg -type truecolor /tmp/logo_kernel.bmp sudo LOGO=/tmp/logo.bmp KERNEL_LOGO=/tmp/logo_kernel.bmp ./build-kernel.sh debian-bullseye-desktop-arm64 sudo ./mk-sd-image.sh debian-bullseye-desktop-arm64 sudo ./mk-emmc-image.sh debian-bullseye-desktop-arm64
Note: If your system is not debian-bullseye-desktop-arm64, please specify according to the actual situation
8.9.2 Change Wallpaper
Modify the following configuration file:
/home/pi/.config/pcmanfm/LXDE/desktop-items-0.conf
8.10 Soft Factory Reset
Execute the following command in a terminal:
sudo firstboot && sudo reboot
8.11 Start the program automatically at startup(For example Kodi)
Put the desktop file in the ~/.config/autostart/ directory, for example:
mkdir ~/.config/autostart/ cp /usr/share/applications/kodi.desktop ~/.config/autostart/
8.12 Disable auto-mounting
sudo systemctl mask udisks2 sudo reboot
8.13 Setup Chinese language and Input method
8.13.1 Setup Chinese language
Enter the following command and select 'zh_CN.UTF-8':
sudo dpkg-reconfigure localesAdd environment variables to .bashrc:
echo "export LC_ALL=zh_CN.UTF-8" >> ~/.bashrc echo "export LANG=zh_CN.UTF-8" >> ~/.bashrc echo "export LANGUAGE=zh_CN.UTF-8" >> ~/.bashrc
Reboot device:
sudo reboot8.13.2 Installing Chinese input method
Enter the following command to install fcitx and Pinyin input method:
sudo apt update sudo apt-get install fcitx fcitx-pinyin sudo apt-get install im-config sudo apt-get install fcitx-table* sudo apt-get install fcitx-ui-classic fcitx-ui-light sudo apt-get install fcitx-frontend-gtk2 fcitx-frontend-gtk3 fcitx-frontend-qt4 sudo apt-get remove --purge scim* ibus* sudo reboot
After reboot, press Ctrl+Space to switch between Chinese and English input methods, and the input method icon will appear in the upper right corner, right-click the input method icon in the upper right corner to switch input methods in the pop-up menu, as shown below: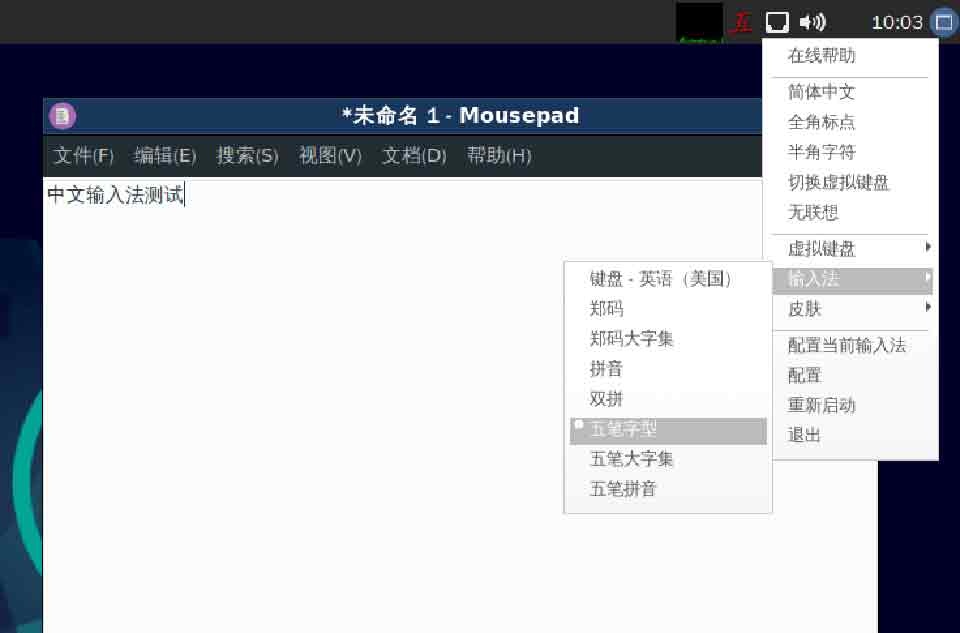
8.14 Installing Plex Multimedia Server
Visit the Plex website: https://www.plex.tv/media-server-downloads/
On the download page, select the category "Plex Media Server", choose "Linux" for the platform and "Ubuntu(16.04+)/Debian(8+) - ARMv8" for the version,
After downloading the deb package, use the dpkg command to install the package:
sudo dpkg -i plexmediaserver_1.31.0.6654-02189b09f_arm64.deb
After installation, login to the Plex server by typing the following URL into your computer browser: http://IP地址:32400/web/
8.15 Install Docker on Debian
Please refer to: How to Install Docker on Debian
8.16 WiFi Connection
8.16.1 Gui
Click on the icon on the top right in the Debian's main window, select your wanted WiFi hotspot and proceed with prompts
8.16.2 Console
Please visit: Use NetworkManager to configure network settings
8.17 Test OpenGL ES
You can test it by clicking on the Terminator icon to start a commandline utility in the System Tools and run the following commands:
glmark2-es2
8.18 HDMI/DP LCD Resolution
Open the system's menu and go to Perferences -> Monitor Settings to customize your settings.
Recommended resolution: 1920x1080@60Hz
8.19 Adjust HDMI overscan
Open the command line terminal and enter the command to operate, Note:
1) You need to login to the desktop;
2) If you are using ssh terminal, please use the same username as the desktop login. The default is pi. You cannot use the root user. you also need to assign the DISPLAY variable:
export DISPLAY=:0.0
8.19.1 Query which resolutions the display supports
xrandr -q8.19.2 Set resolution
For example set to 1920X1080@60Hz:
xrandr --output HDMI-1 --mode 1920x1080 --refresh 60
8.19.3 Adjust the HDMI overscan
For example, the transformation scaling horizontal coordinates by 0.8, vertical coordinates by 1.04 and moving the screen by 35 pixels right and 19 pixels down:
xrandr --output HDMI-1 --transform 0.80,0,-35,0,1.04,-19,0,0,1
8.19.4 Automatic adjustment at boot
Edit ~/.config/autostart/lxrandr-autostart.desktop,Write the full xrandr command to the key at the beginning of "Exec= as shown below:
[Desktop Entry] Type=Application Name=LXRandR autostart Comment=Start xrandr with settings done in LXRandR Exec=sh -c 'xrandr --output HDMI-1 --mode 1920x1080 --refresh 50 --transform 1.04,0,-35,0,1.05,-30,0,0,1' OnlyShowIn=LXDE
8.20 Chromium web browser
8.20.1 GPU
Chromium web browser has enabled hardware acceleration by default, supports WebGL, and can view hardware acceleration details by entering the URL chrome://gpu, as shown below:
8.20.2 VPU
Play a video in the browser, then use fuser on the command line to view the mpp device node to confirm that the vpu interface is being called:
pi@FriendlyElec:~$ fuser /dev/mpp_service /dev/mpp_service: 3258
If there is no content output from the fuser command, it means software decoding.
9 Work with Debian10 Desktop
- Refer to:
10 Work with FriendlyCore
10.1 FriendlyCore User Account
- Non-root User:
User Name: pi Password: pi
- Root:
User Name: root Password: fa
10.2 Update Software Packages
$ sudo apt-get update
10.3 Setup Network Configurations
10.3.1 Set static IP address
By default "eth0" is assigned an IP address obtained via dhcp. If you want to change the setting you need to change the following file:
vi /etc/network/interfaces.d/eth0
For example if you want to assign a static IP to it you can run the following commands:
auto eth0
iface eth0 inet static
address 192.168.1.231
netmask 255.255.255.0
gateway 192.168.1.1The other ethernet port are set up with static IP addresses, as follows:
eth1: 192.168.2.1
10.3.2 Set a DNS
You also need to modify the following file to add the DNS configuration:
vi /etc/systemd/resolved.conf
For example, set to 192.168.1.1:
[Resolve] DNS=192.168.1.1
Restart the systemd-resolved service with the following command:
sudo systemctl restart systemd-resolved.service sudo systemctl enable systemd-resolved.service
10.3.3 Set up to use another network interface
To change the setting of "eth1" you can add a new file similar to eth0's configuration file under the /etc/network/interfaces.d/ directory.
10.4 Setup Wi-Fi
First, use the following command to check if Network-Manager is installed on your system:
which nmcliIf you have installed it, refer to this link to connect to WiFi: Use NetworkManager to configure network settings, If you do not have Network-Manager installed on your system, please refer to the following method to configure WiFi,
By default the WiFi device is "wlan0". You need to create a configuration file under "/etc/network/interfaces.d/" for WiFi:
vi /etc/network/interfaces.d/wlan0
Here is a sample wlan0 file:
auto lo
iface lo inet loopback
auto wlan0
iface wlan0 inet dhcp
wpa-driver wext
wpa-ssid YourWiFiESSID
wpa-ap-scan 1
wpa-proto RSN
wpa-pairwise CCMP
wpa-group CCMP
wpa-key-mgmt WPA-PSK
wpa-psk YourWiFiPasswordPlease replace "YourWiFiESSID" and "YourWiFiPassword" with your WiFiESSID and password. After save and close the file you can connect to your WiFi source by running the following command:
sudo systemctl daemon-reload sudo systemctl restart networking
After you power on your board it will automatically connect to your WiFi source.
Please note that if you use one TF card to boot multiple boards the WiFi device name will likely be named to "wlan1", "wlan2" and etc. You can reset it to "wlan0" by deleting the contents of the following file and reboot your board: /etc/udev/rules.d/70-persistent-net.rules
10.4.1 WiFi models supported
10.4.1.1 M.2 WiFi Module
- RTL8822CE
10.4.1.2 Usb Dongle
- RTL8821CU (Vid: 0BDA, Pid: C811) (Test sample:TP-Link TL-WDN5200H)
- RTL8812AU (Vid: 0BDA, Pid: 8812)
- MediaTek MT7662 (Vid: 0E8D, Pid: 7612) (Test sample:COMFAST CF-WU782AC V2)
10.5 Install the kernel-header package
sudo dpkg -i /opt/linux-headers-*.deb
10.6 Config status LEDs
First determine whether the system already exists the leds initialization service:
sudo systemctl status ledsIf the leds service already exists, change the default behavior of the LEDs by editing the following file:
/etc/init.d/leds.sh
Since there is no leds service in the early firmware, you need to refer to the following guide to manually configure the LEDs. First, set the following kernel modules to be automatically loaded at boot:
modprobe ledtrig-netdev echo ledtrig-netdev > /etc/modules-load.d/ledtrig-netdev.conf
Put the following into the autorun script to associate the status leds with the ethernet interface, and you can configure it to behave in other ways by referring to these content:
echo netdev > /sys/class/leds/usr_led/trigger echo eth0 > /sys/class/leds/usr_led/device_name echo 1 > /sys/class/leds/usr_led/link
11 How to Compile
11.1 Setup Development Environment
11.1.1 Method 1: Using docker to cross-compile
Please refre to docker-cross-compiler-novnc
11.1.2 Method 2: Setup build environment on the host machine
11.1.2.1 Install required packages
Install and run requirements ubuntu 20.04, install required packages using the following commands:
sudo apt-get -y update sudo apt-get install -y sudo curl sudo bash -c \ "$(curl -fsSL https://raw.githubusercontent.com/friendlyarm/build-env-on-ubuntu-bionic/master/install.sh)"
The following cross-compilers will be installed:
| Version | Architecture | Compiler path | Purpose |
|---|---|---|---|
| 4.9.3 | armhf | /opt/FriendlyARM/toolchain/4.9.3 | Can be used to build 32-bit ARM applications |
| 6.4 | aarch64 | /opt/FriendlyARM/toolchain/6.4-aarch64 | Can be used to build kernel 4.4 |
| 11.3 | aarch64 | /opt/FriendlyARM/toolchain/11.3-aarch64 | Can be used to build kernel 4.19 or higher and U-Boot |
11.1.2.2 Setting the compiler path
Based on the table in the previous section, select the appropriate version of the compiler and add the compiler's path to PATH. For example, if you want to use the 11.3 cross-compiler, edit ~/.bashrc using vi and add the following content to the end:
export PATH=/opt/FriendlyARM/toolchain/11.3-aarch64/bin:$PATH export GCC_COLORS=auto
Run the ~/.bashrc script to make it effective in the current commandline. Note: there is a space after ".":
. ~/.bashrcTo verify if the installation was successful:
$ aarch64-linux-gcc -v Using built-in specs. COLLECT_GCC=aarch64-linux-gcc COLLECT_LTO_WRAPPER=/opt/FriendlyARM/toolchain/11.3-aarch64/libexec/gcc/aarch64-cortexa53-linux-gnu/11.3.0/lto-wrapper Target: aarch64-cortexa53-linux-gnu Configured with: /home/cross/arm64/src/gcc/configure --build=x86_64-build_pc-linux-gnu --host=x86_64-build_pc-linux-gnu --target=aarch64-cortexa53-linux-gnu --prefix=/opt/FriendlyARM/toolchain/11.3-aarch64 --exec_prefix=/opt/FriendlyARM/toolchain/11.3-aarch64 --with-sysroot=/opt/FriendlyARM/toolchain/11.3-aarch64/aarch64-cortexa53-linux-gnu/sysroot --enable-languages=c,c++ --enable-fix-cortex-a53-843419 --with-arch=armv8-a+crypto+crc --with-cpu=cortex-a53 --with-pkgversion=ctng-1.25.0-119g-FA --with-bugurl=http://www.friendlyelec.com/ --enable-objc-gc --enable-__cxa_atexit --disable-libmudflap --disable-libgomp --disable-libssp --disable-libquadmath --disable-libquadmath-support --disable-libsanitizer --disable-libmpx --with-gmp=/home/cross/arm64/buildtools --with-mpfr=/home/cross/arm64/buildtools --with-mpc=/home/cross/arm64/buildtools --with-isl=/home/cross/arm64/buildtools --enable-lto --enable-threads=posix --disable-libstdcxx-pch --enable-clocale=gnu --enable-libstdcxx-time=yes --with-default-libstdcxx-abi=new --enable-gnu-indirect-function --enable-gnu-unique-object --enable-default-pie --enable-linker-build-id --with-linker-hash-style=gnu --enable-plugin --enable-gold --with-libintl-prefix=/home/cross/arm64/buildtools --disable-multilib --with-local-prefix=/opt/FriendlyARM/toolchain/11.3-aarch64/aarch64-cortexa53-linux-gnu/sysroot --enable-long-long --enable-checking=release --enable-link-serialization=2 Thread model: posix Supported LTO compression algorithms: zlib gcc version 11.3.0 (ctng-1.25.0-119g-FA)
11.2 Build Openwrt/Friendlywrt
11.2.1 Download Code
Two versions are available, please choose as required:
11.2.1.1 FriendlyWrt 21.02
mkdir friendlywrt21-rk3588 cd friendlywrt21-rk3588 git clone https://github.com/friendlyarm/repo --depth 1 tools tools/repo init -u https://github.com/friendlyarm/friendlywrt_manifests -b master-v21.02 \ -m rk3588.xml --repo-url=https://github.com/friendlyarm/repo --no-clone-bundle tools/repo sync -c --no-clone-bundle
11.2.1.2 FriendlyWrt 22.03.2
mkdir friendlywrt22-rk3588 cd friendlywrt22-rk3588 git clone https://github.com/friendlyarm/repo --depth 1 tools tools/repo init -u https://github.com/friendlyarm/friendlywrt_manifests -b master-v22.03 \ -m rk3588.xml --repo-url=https://github.com/friendlyarm/repo --no-clone-bundle tools/repo sync -c --no-clone-bundle
11.2.2 First compilation step
./build.sh rk3588.mk # or rk3588-docker.mk
All the components (including u-boot, kernel, and friendlywrt) are compiled and the sd card image will be generated, then execute the following command to generate the image file for installing the system into the emmc:
./build.sh emmc-imgAfter making changes to the project, the sd card image needs to be repackaged by running the following command:
./build.sh sd-img11.2.3 Secondary compilation steps
cd friendlywrt make menuconfig rm -rf ./tmp make -j${nproc} cd ../ ./build.sh sd-img ./build.sh emmc-img
11.2.4 Build u-boot only
./build.sh uboot11.2.5 Build kernel only
./build.sh kernel11.2.6 Build friendlywrt only
./build.sh friendlywrtOr go to the friendlywrt directory and follow the standard openwrt commands. If you get an error with the above command, try using the following command to compile in a single thread:
cd friendlywrt make -j1 V=s
11.3 Build Other Linux
11.3.1 Kernel and u-boot versions
| Operating System | Kernel Version | U-boot version | Cross-compiler | Partition type | Packaging Tool | Kernel branch | Kernel configuration | U-boot branch | U-boot configuration |
|---|---|---|---|---|---|---|---|---|---|
| buildroot | linux v5.10.y | u-boot v2017.09 | 11.3-aarch64 | nanopi6_linux_defconfig | rk3588_defconfig | ||||
| ubuntu-jammy-desktop-arm64 | |||||||||
| ubuntu-jammy-minimal-arm64 | |||||||||
| friendlycore-focal-arm64 | |||||||||
| debian-bullseye-core-arm64 | |||||||||
| debian-bullseye-desktop-arm64 | |||||||||
| debian-bullseye-minimal-arm64 | |||||||||
| debian-buster-desktop-arm64 | |||||||||
| friendlywrt21 | nanopi6_linux_defconfig friendlywrt.config | ||||||||
| friendlywrt21-docker | |||||||||
| friendlywrt22 | |||||||||
| friendlywrt22-docker |
- Kernel git repo:https://github.com/friendlyarm/kernel-rockchip
- U-boot git repo:https://github.com/friendlyarm/uboot-rockchip
- The cross-compile toolchain is located in the path: /opt/FriendlyARM/toolchain/
- The sd-fuse is a helper script to make bootable SD card image.
11.3.2 Build kernel linux-v5.10.y
Clone the repository to your local drive then build:
git clone https://github.com/friendlyarm/kernel-rockchip --single-branch --depth 1 -b nanopi5-v5.10.y_opt kernel-rockchip cd kernel-rockchip export PATH=/opt/FriendlyARM/toolchain/11.3-aarch64/bin/:$PATH touch .scmversion # Configuring the Kernel # Load default configuration make CROSS_COMPILE=aarch64-linux-gnu- ARCH=arm64 nanopi6_linux_defconfig # Optionally, load configuration for FriendlyWrt # make CROSS_COMPILE=aarch64-linux-gnu- ARCH=arm64 nanopi6_linux_defconfig friendlywrt.config # Optionally, if you want to change the default kernel config # make CROSS_COMPILE=aarch64-linux-gnu- ARCH=arm64 menuconfig # Start building kernel make CROSS_COMPILE=aarch64-linux-gnu- ARCH=arm64 nanopi6-images -j$(nproc) # Start building kernel modules mkdir -p out-modules && rm -rf out-modules/* make CROSS_COMPILE=aarch64-linux-gnu- ARCH=arm64 INSTALL_MOD_PATH="$PWD/out-modules" modules -j$(nproc) make CROSS_COMPILE=aarch64-linux-gnu- ARCH=arm64 INSTALL_MOD_PATH="$PWD/out-modules" modules_install KERNEL_VER=$(make CROSS_COMPILE=aarch64-linux-gnu- ARCH=arm64 kernelrelease) [ ! -f "$PWD/out-modules/lib/modules/${KERNEL_VER}/modules.dep" ] && depmod -b $PWD/out-modules -E Module.symvers -F System.map -w ${KERNEL_VER} (cd $PWD/out-modules && find . -name \*.ko | xargs aarch64-linux-strip --strip-unneeded)
The generated files:
| kernel.img | resource.img | The kernel modules are located in the out-modules directory |
Run your build:
Please refre to #Running the build
11.3.3 Build u-boot v2017.09
Clone the repository to your local drive then build:
git clone https://github.com/friendlyarm/rkbin --single-branch --depth 1 -b nanopi6 git clone https://github.com/friendlyarm/uboot-rockchip --single-branch --depth 1 -b nanopi6-v2017.09 export PATH=/opt/FriendlyARM/toolchain/11.3-aarch64/bin/:$PATH cd uboot-rockchip/ ./make.sh nanopi6
After the compilation, the following files will be generated:
| uboot.img | rk3588_spl_loader_v1.08.111.bin (aka MiniLoaderAll.bin) |
Run your build:
Please refre to #Running the build
11.3.4 Running the build
11.3.4.1 Install to target board
RK3588 uses GPT partitions by default, you can use the dd command, but be careful to choose the right output device:
- The SD/TF Card device node: /dev/mmcblk0
- The eMMC device node: /dev/mmcblk2
Use the 'parted' command to view the partition layout:
parted /dev/mmcblk2 print
Sample outputs:
Model: MMC A3A551 (sd/mmc) Disk /dev/mmcblk2: 31.0GB Sector size (logical/physical): 512B/512B Partition Table: gpt Disk Flags: Number Start End Size File system Name Flags 1 8389kB 12.6MB 4194kB uboot 2 12.6MB 16.8MB 4194kB misc 3 16.8MB 21.0MB 4194kB dtbo 4 21.0MB 37.7MB 16.8MB resource 5 37.7MB 79.7MB 41.9MB kernel 6 79.7MB 113MB 33.6MB boot 7 113MB 147MB 33.6MB recovery 8 147MB 31.0GB 30.9GB ext4 rootfs
as shown above, the resource partition is located at 4 and the kernel partition is located at 5. Use the dd command to write the resource.img and kernel.img files to these partitions, the commands are as follows:
dd if=resource.img of=/dev/mmcblk2p4 bs=1M dd if=kernel.img of=/dev/mmcblk2p5 bs=1M
If you want to update u-boot:
dd if=boot.img of=/dev/mmcblk2p1 bs=1M
To update new driver modules, copy the newly compiled driver modules to the appropriate directory under /lib/modules.
11.3.4.2 Packaging and creating an SD image
To create a new OS image file, you need to use the "sd-fuse" packaging tool.
"sd-fuse" is a collection of scripts that can be used to create bootable SD card images for FriendlyElec boards. Its main features include:
- Creation of root filesystem images from a directory
- Building of bootable SD card images
- Simple compilation of kernel, U-Boot, and third-party drivers
Please click on the following link to find out more:
| Kernel version | Packaging Tool |
|---|---|
| linux v5.10.y |
11.3.4.3 USB flashing
11.3.4.3.1 Linux
To flash U-Boot and kernel using the "upgrade_tool" tool, please use the following command:
sudo upgrade_tool ul MiniLoaderAll.bin sudo upgrade_tool di -p parameter.txt sudo upgrade_tool di uboot uboot.img sudo upgrade_tool di resource resource.img sudo upgrade_tool di kernel kernel.img sudo upgrade_tool RD
Note: "upgrade_tool" is a command-line tool provided by Rockchip for Linux operating systems (Linux_Upgrade_Tool).
11.4 Build the code using scripts
11.4.1 Download scripts and image files
git clone https://github.com/friendlyarm/sd-fuse_rk3588.git --single-branch -b master cd sd-fuse_rk3588 tar xvzf /path/to/netdrive/03_Partition\ image\ files/friendlycore-focal-arm64-images.tgz
11.4.2 Compile the kernel
Download the kernel source code and compile it. the relevant image files in the friendlycore-focal-arm64 directory will be automatically updated, including the kernel modules in the file system:
git clone https://github.com/friendlyarm/kernel-rockchip --depth 1 -b nanopi5-v5.10.y_opt kernel-rk3588 KERNEL_SRC=$PWD/kernel-rk3588 ./build-kernel.sh friendlycore-focal-arm64
11.4.3 Compile the kernel headers
git clone https://github.com/friendlyarm/kernel-rockchip --depth 1 -b nanopi5-v5.10.y_opt kernel-rk3588 MK_HEADERS_DEB=1 BUILD_THIRD_PARTY_DRIVER=0 KERNEL_SRC=$PWD/kernel-rk3588 ./build-kernel.sh friendlycore-focal-arm64
11.4.4 Compile the uboot
Download the uboot source code and compile it. the relevant image files in the friendlycore-focal-arm64 directory will be automatically updated:
git clone https://github.com/friendlyarm/uboot-rockchip --depth 1 -b nanopi6-v2017.09 UBOOT_SRC=$PWD/uboot-rockchip ./build-uboot.sh friendlycore-focal-arm64
11.4.5 Generate new image
Repackage the image file in the friendlycore-focal-arm64 directory into sd card image:
./mk-sd-image.sh friendlycore-focal-arm64After the command is completed, the image is in the out directory, you can use the dd command to make the SD boot card, for example:
dd if=out/rk3588-sd-friendlycore-focal-5.10-arm64-YYYYMMDD.img of=/dev/sdX bs=1M
11.5 Building AOSP from source
11.5.1 Hardware and Software Requirements
- Your computer should have at least 16GB of RAM and 300GB of disk space. We recommend using a machine with 32GB of RAM and a large-capacity, high-speed SSD, and we do not recommend using virtual machines.
- If you encounter compilation errors, they may be caused by problems with the compilation environment. We recommend using the following Docker container for compilation: docker-cross-compiler-novnc.
11.5.2 Download source from the netdrive
Netdisk URL: Click here
File location on netdisk:"07_Source codes/rk35xx-android12-xxxxxxx-YYYYMMDD.tgz" (YYYYMMDD represents the date of the package, and xxxxxxx represents the final commit-id)
Unzip and fetch updates:
tar xzf '/path/to/netdisk/07_Source codes/rk35xx-android12-xxxxxxx-YYYYMMDD.tgz' cd rk35xx-android12 git pull
11.5.3 Tablet profile build (First Build)
echo "ROCKCHIP_DEVICE_DIR := device/rockchip/rk3588/nanopi6" > .rockchip_device.mk # export INSTALL_GAPPS_FOR_TESTING=yes # include google apps . setenv.sh ./build.sh -FMu
11.5.4 TV profile build (First Build)
echo "ROCKCHIP_DEVICE_DIR := device/rockchip/rk3588/nanopi6_box" > .rockchip_device.mk # export INSTALL_GAPPS_FOR_TESTING=yes # include google apps . setenv.sh ./build.sh -FMu
11.5.5 Second build
# export INSTALL_GAPPS_FOR_TESTING=yes # include google apps . setenv.sh make
11.5.6 Running your AOSP build
After the Android compilation is completed, the image file will be stored in the rockdev/Image-aosp_nanopi3 subdirectory of the Android source code directory.
11.5.6.1 USB Flashing
Use the rockchip tool to flash the following file: rockdev/Image-aosp_nanopi3/update.img
11.5.6.2 SD-to-eMMC Flashing
Refer to the following steps:
1) Insert the SD card of the eflasher system into the host;
2) Copy the files in the rockdev/Image-aosp_nanopi3 directory to the android12 or androidtv directory in the FRIENDLYARM partition of the SD card:
sudo cp -af parameter.txt config.cfg MiniLoaderAll.bin uboot.img \ dtbo.img vbmeta.img boot.img recovery.img \ misc.img pcba_small_misc.img pcba_whole_misc.img \ baseparameter.img super.img /media/$USER/FriendlyARM/android12
3) Insert the SD card into NanoPC-T6 and re-flash;
11.5.7 Pack the new SD Image
git clone https://github.com/friendlyarm/sd-fuse_rk3588.git SDFUSE=$PWD/sd-fuse_rk3588 mkdir $SDFUSE/android12 cd /path/to/rk35xx-android12/rockdev/Image-aosp_nanopi3 cp -af parameter.txt config.cfg MiniLoaderAll.bin uboot.img \ dtbo.img vbmeta.img boot.img recovery.img \ misc.img pcba_small_misc.img pcba_whole_misc.img \ baseparameter.img super.img $SDFUSE/android12 cd $SDFUSE/ ./mk-sd-image.sh android12 tar xvzf /path/to/netdrive/03_Partition\ image\ files/emmc-flasher-images.tgz ./mk-emmc-image.sh android12
For more information, please refer to #Packaging and creating an SD image
12 Backup rootfs and create custom SD image (to burn your application into other boards)
12.1 Backup rootfs
Run the following commands on your target board. These commands will back up the entire root partition:
sudo passwd root su root cd / tar --warning=no-file-changed -cvpzf /rootfs.tar.gz \ --exclude=/rootfs.tar.gz --exclude=/var/lib/docker/runtimes \ --exclude=/etc/firstuser --exclude=/etc/friendlyelec-release \ --exclude=/usr/local/first_boot_flag --one-file-system /
12.2 Making a bootable SD card from a root filesystem
Run the following script on your Linux PC host, we'll only mention "debian-buster-desktop-arm64 os" for brevity, but you can apply the same process for every linux OS.
su root git clone https://github.com/friendlyarm/sd-fuse_rk3588 --single-branch -b master cd sd-fuse_rk3588 tar xvzf /path/to/netdrive/03_Partition\ image\ files/debian-buster-desktop-arm64-images.tgz tar xvzf /path/to/netdrive/03_Partition\ image\ files/emmc-eflasher-images.tgz scp pi@BOARDIP:/rootfs.tar.gz /rootfs.tar.gz mkdir rootfs tar xzf rootfs.tar.gz -C rootfs ./build-rootfs-img.sh rootfs debian-buster-desktop-arm64 ./mk-sd-image.sh debian-buster-desktop-arm64 ./mk-emmc-image.sh debian-buster-desktop-arm64 autostart=yes
13 Configuring kernel command line parameters
13.1 eMMC Boot
Here are the steps:
Make an eflahser bootable SD card (use the firmware file starting with rk3xxxx-eflasher-),
Insert the SD card into your computer, go to the SD card's OS-related directory, and edit the file parameter.txt, which is a text file containing command-line parameters,
Then boot from the SD card and burn the system to the eMMC.
13.2 SD Boot
To modify the command line parameters of the SD card, you need to repackage the SD card image file,
you can use the sd-fuse script we provide to assist packaging:
git clone https://github.com/friendlyarm/sd-fuse_rk3588.git -b master --single-branch cd sd-fuse_rk3588 tar xvzf /path/to/netdrive/03_Partition\ image\ files/friendlywrt22-images.tgz tar xvzf /path/to/netdrive/03_Partition\ image\ files/emmc-flasher-images.tgz vim friendlywrt22/parameter.txt # Edit command-line parameters ./mk-sd-image.sh friendlywrt22 # Repackage sd image file ./mk-emmc-image.sh friendlywrt22 # Repackage sd-to-emmc image file
14 Connect NVME SSD High Speed Hard Disk
14.1 Detection of SSD
root@FriendlyELEC:~# cat /proc/partitions major minor #blocks name 1 0 4096 ram0 259 0 125034840 nvme0n1
If there is a nvme0n1 device node it means an SSD is recognized.
14.2 Partition of SSD
To mount an SSD under Linux we re-partition it as one section by running the following command:
(echo g; echo n; echo p; echo 1; echo ""; echo ""; echo w; echo q) | fdisk /dev/nvme0n1
If you want to re-partition it to multiple sections you can run "fdisk /dev/nvme0n1". For more detail about this command refer to the fdisk's manual.
14.3 Format Section to EXT4
After an SSD is successfully partitioned you can check its sections by running "cat /proc/partitions". The /dev/nvme0n1p1 section is used to store data:
root@FriendlyELEC:~# cat /proc/partitions major minor #blocks name 1 0 4096 ram0 259 0 125034840 nvme0n1 259 2 125033816 nvme0n1p1
The following command formats a section to ext4:
mkfs.ext4 /dev/nvme0n1p1
14.4 Auto Mount SSD on System Startup
Before we mount an SSD's section you need to know its Block ID. You can check it by running "blkid":
blkid /dev/nvme0n1p1 /dev/nvme0n1p1: UUID="d15c4bbf-a6c3-486f-8f81-35a8dbd46057" TYPE="ext4" PARTUUID="887628f0-01"
Add a "Block ID" to "/etc/fstab" and here is what it looks like
UUID=<Block ID> /media/nvme ext4 defaults 0 0
You need to replace <Block ID> with the UUID obtained by running "blkid". To mount the SSD in our example we made the "/etc/fstab" file as follows:
UUID=d15c4bbf-a6c3-486f-8f81-35a8dbd46057 /media/nvme ext4 defaults 0 0
We want to mount an SSD to "/media/nvme" but this directory doesn't exist. Therefore we create it and change its access right by running the following commands:
mkdir -p /media/nvme chmod 777 /media/nvme
Run "mount" to check if the SSD is mounted successfully:
mount /media/nvme
You can reboot your board to check if your SSD will be automatically mounted:
reboot
15 Schematic, PCB CAD File
- Schematic: https://wiki.friendlyelec.com/wiki/images/9/97/NanoPC-T6_2301_SCH.PDF
- PCB CAD File:https://wiki.friendlyelec.com/wiki/images/9/90/NanoPC-T6_2301_DXF.zip
16 Update Logs
16.1 2023-05-27
16.1.1 Ubuntu22
- Fix multi-screen display issue (4K+4K+4K or 8K+4K)
16.2 2023-05-26
16.2.1 Ubuntu22
- Fixed audio issues with DP
- Fixed 8K display (HDMI TX0 port)
- Optimized r8125 performance and stability
16.2.2 FriendlyWrt
- Updated v22.03 to openwrt-22.03.5
- Updated v21.02 to openwrt-21.02.7
- Optimized r8125 performance and stability
16.3 2023-05-21
16.3.1 Debian11
- Update to Rockchip sdk version linux-5.10-gen-rkr4
- Switch desktop to LXDE
16.4 2023-05-15
16.4.1 FriendlyCore Focal
- Add Qt 5.10 support
16.5 2023-05-05
16.5.1 Android
- Add USB bluetooth dongle support (rtl8761bu)
- Add M.2 RTL8822CE bluetooth support
16.6 2023-04-26
16.6.1 FriendlyWrt:
- Upgrade v22.03 to openwrt-22.03.4
- Upgrade v21.02 to openwrt-21.02.6
16.7 2023-02-10
16.7.1 Android update
- android support direct boot from sd card
- Fix the problem that in some cases hdmi has no signal output and needs to be plugged in once to recover
- Support enable adb function through android interface
16.7.2 Added Debian11
There are three versions:
- Debian11 Core: Command-line only
- Debian11 Minimal: With Xfce desktop, lite version
- Debian11 Desktop: With Xfce desktop, full version
16.8 2023-01-09
16.8.1 New OS:
- Android12: Android 12 Tablet
- FrienclyCore: Lightweight version of Linux, based on Ubuntu Core 20.04, no desktop system
16.8.2 Android:
- Add support for USB WiFi module (Model: RTL8822CE/RTL8812AU/MediaTek MT7662)
- Update SDK to Rockchip android-12.1-mid-rkr12
16.8.3 Ubuntu jammy:
- optimized the systemd service
16.9 2022-12-13
16.9.1 Ubuntu jammy:
- Fix WiFi issue
16.10 2022-12-04
16.10.1 FriendlyWrt:
- Fix the issue that the storage space cannot be expanded
- Improve stability of the eMMC Tools
16.11 2022-11-17
16.11.1 FriendlyWrt:
- Fix 1G LAN port not working issue
16.11.2 Ubuntu jammy desktop:
- Add chromium video hardware decoding support
- Add hardware cursor support
16.12 2022-10-25
Initial Release

