

Gripper-A 使用教程
产品说明
产品介绍
本产品是一款基于 CF35-12 串行总线舵机的机器人夹爪,该夹爪整体零件上分别采用了不锈钢和铝合金,兼具轻盈与耐用的特性,为您带来更稳定的抓取体验。
CF35-12 串行总线舵机采用了 360°高精度的磁编码器,可以在 360°范围内进行角度控制(由于该产品的结构限制,实际控制无法实现 360°广范围的角度)。该舵机能够通过程序控制,内置加速度启停功能,使动作更加柔和。每个舵机上面有两个接口,可以将该夹爪与其它 TTL 串联起来使用,且每个舵机都能够获取当前的角度、负载、电压及模式等信息。
同时,该产品夹头部分的隔离柱灵活可调,轻松适配夹取不同大小尺寸的物体。且结构上还预留可安装摄像头配件的空间,可供用户二次开发开启视觉应用。
产品特性
- 可串联使用,同时控制多达 253 个舵机(前提是供电充分)并获取每个舵机的反馈信息
- 360°磁编码器,角度控制范围更大
- 高精度,角度控制精度达到 360°/4096
- 可将任意角度设置为舵机中位
- 加速度启停功能,运动效果更加柔和
- 紧凑的结构设计,产品外观更加美观
- 宽电压输入 6-12.6V,可以与 2s 或 3s 锂电池直接供电
- 大扭矩,堵转扭矩可达到 35kg.cm@12V
产品参数
| Gripper-B 夹爪 | |||
|---|---|---|---|
| 舵机 | CF35-12 | 堵转扭矩 | 35KG.CM |
| 通信波特率 | 1Mbps | 空载转速 | 0.222sec/60°(45RPM)@12V |
| 位置传感器分辨率 | 360°/4096 | ID 范围 | 0-253 |
| 堵转电流 | 2.8A | 空载电流 | 150mA |
| 工作电压 | 9~12.6V | 重量 | 246±5g |
| 夹持宽度 | 0~80mm | 尺寸 | 130*160*62mm |
产品使用注意事项
1. 在使用前确认工作电压是否为产品参数中规定电压范围。
2. 使用前请确保接线正确,稳固,避免接触不良的情况出现。
3. 我们提供的例程中有做软件限位,若您自行二次开发,需要注意给舵机设定的转动角度,避免因软件设置与结构限制之间的冲突而导致舵机堵转烧毁。
舵机接口及线序说明
- 接口类型:5264-3P
- 配套的舵机线是异向接口,若您自行购买其它 5264-3P 接口的线,需注意不能同向接入舵机中,否则引脚会对应接错,有烧坏驱动板的可能性。
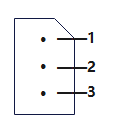
| 线序号 | 名称 | 颜色 | 类型 | 说明 |
|---|---|---|---|---|
| 1 | Signal/TTL | 白色 | 信号线 | 单线串口 |
| 2 | VCC | 红色 | 电源正极 | - |
| 3 | GND | 黑色 | 电源负极 | - |
安装指引
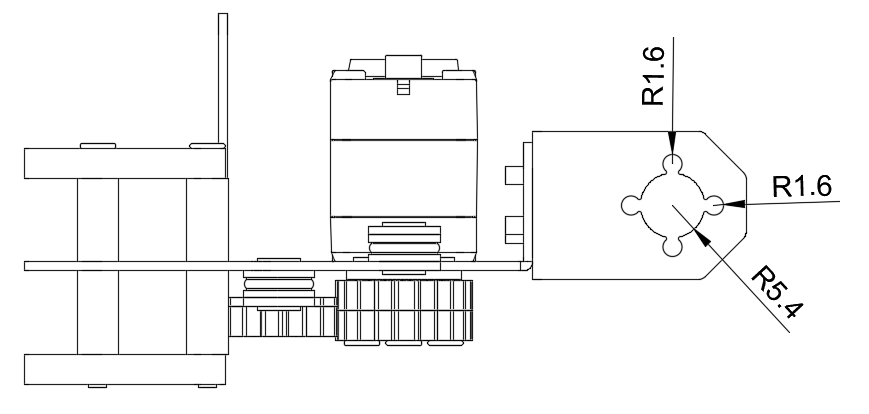
- 结构件上有预留安装到其它同尺寸舵机的安装孔,安装孔为 R1.6mm 的圆,可以使用我们配套的银色金属扁平头螺丝 CM3*6*7 进行安装。
产品使用
我们提供一个简单的串口调试例程,该例程是基于 ESP32 驱动板的串口进行调试的。配套的驱动板我们推荐:Bus Servo Driver HAT (A) 这款;当然,如果您手上已有 General Driver for Robots 或者 Servo Driver with ESP32 这两款也是可以使用的。
硬件连接
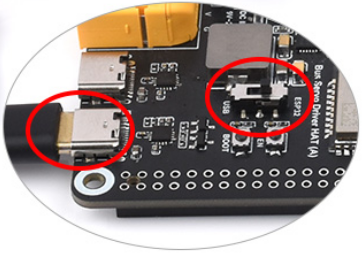
将夹爪通过舵机线与驱动板上的 5264-3P 接口相连接,给驱动板进行供电,确保驱动板上的开关档位处于 ESP32 档位,用 USB 线连接驱动板与 PC 电脑(见下图)。
软件烧录
在测试之前,需要先给我们的驱动板进行程序烧录,步骤如下:
1. 点击 ESP32 下载工具进行下载,下载后进行解压缩,双击打开“flash_download_tool_3.9.5.exe”程序。打开后,会弹出两个窗口,我们需要操作的是下载工具的 UI 界面,而另一个窗口作为终端来显示下载工具的工作状态。
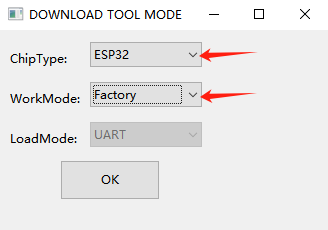
2. 在“DOWNLOAD TOOL MODE”这个界面,Chip Type 选择为 ESP32,WorkMode 选择为 Factory。(使用 Factory,调用二进制文件时才会使用相对路径,就不需要用户手动输入二进制文件路径,选择好后点击 OK。)
3. 进入下载工具软件界面,右边代表的是可以同时给 8 个驱动板上传程序。将 Bus Servo Driver HAT (A) 驱动板上的开关档位拨动至“ESP32”的档位上,用 USB 线将 Bus Servo Driver HAT (A) 驱动板上的 ESP32-USB 接口与电脑相连接,点击“COM”,选择新出现的 COM(我这里新出现的 COM 为 COM27);BAUD 是用于设置下载速度,越高速度越快,ESP32 最高可以使用 921600。
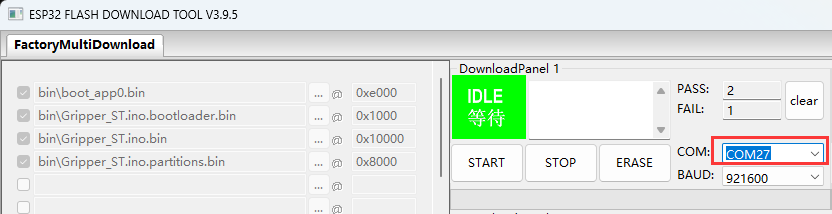
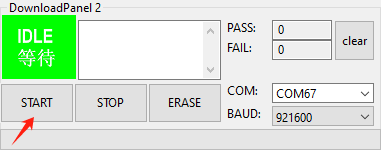
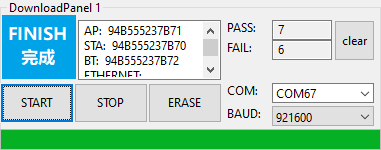
4. 选择好后,点击“START”开始上传程序,上传完成后,“IDLE等待”会变成“FINISH完成”,完成后可以断开驱动板与电脑的 USB 连接,连接 Gripper-B 夹爪,按照下面的内容进行控制。
串口调试助手
这里介绍使用简单的串口调试助手来控制夹爪:
- 下载串口调试助手
- 确保上述程序已烧录至驱动板中,且夹爪、驱动板与 PC 都已连接好
- 双击打开 cktszsss32.exe,选择 USB 端口号,打开串口,波特率 115200,编辑 JSON 指令,需要在 JSON 指令后面手动添加换行符 \n,或者也可以不加“\n”,勾选“加回车换行”
- 例程中 JSON 指令的功能含义见下方
JSON 指令表
- {"T":121,"angle":90,"spd":100,"acc":10} —— 角度控制指令
- angle:角度控制范围为 90°~180°;
- spd:转动的速度,速度单位为步/秒,舵机的一圈为 4096 步,数值越大速度越快,当速度值为 0 时,以最大速度转动;
- acc:转动开始和结束时的加速度,数值越小启停越平滑,数值可以为 0-254 ,单位为 100 步/秒^2。如设置为 10 时,则按照 1000 步每秒的平方加速度变速。当加速度值为 0 时,则按照最大的加速度运行。
- {"T":210,"cmd":0} —— 扭矩锁控制指令
- cmd:0 —— 关闭扭矩锁;1 —— 开启扭矩锁。
- {"T":105} —— 舵机信息反馈指令
- {"T":112,"mode":0,"g":1000}—— 动态外力自适应控制指令
- mode:动态外力自适应开关模式的代号。
- 0:表示关闭该功能,关闭后在机械臂接通电源时不可手动使关节转动。
- 1:表示开启该功能,开启后使用外力转动机械臂会回弹至转动前的位置。
- g:夹爪最大输出扭矩限制值。
- mode:动态外力自适应开关模式的代号。
- {"T":101,"spd":100,"acc":10} —— 夹爪开启指令(默认张开至最大夹持角度)
- spd:转动的速度,速度单位为步/秒,舵机的一圈为 4096 步,数值越大速度越快,当速度值为 0 时,以最大速度转动;
- acc:转动开始和结束时的加速度,数值越小启停越平滑,数值可以为 0-254 ,单位为 100 步/秒^2。如设置为 10 时,则按照 1000 步每秒的平方加速度变速。当加速度值为 0 时,则按照最大的加速度运行。
- {"T":102,"spd":100,"acc":10} —— 夹爪夹紧指令(默认夹紧)
- spd:转动的速度,速度单位为步/秒,舵机的一圈为 4096 步,数值越大速度越快,当速度值为 0 时,以最大速度转动;
- acc:转动开始和结束时的加速度,数值越小启停越平滑,数值可以为 0-254 ,单位为 100 步/秒^2。如设置为 10 时,则按照 1000 步每秒的平方加速度变速。当加速度值为 0 时,则按照最大的加速度运行。
- {"T":503,"id":1,"tor":200} —— 恒力模式设置指令(仅 Gripper-B 型号的夹爪可用)
- id:夹爪默认 ID 为 1;
- tor:可设置的输出最大扭矩值。
产品资料
3D 模型
开源例程
串口助手
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841

