- 首页
- >
- 产品中心
- >
- Jetson系列
- >
- Jetson系列主板
- >
- Jetson Orin
- /
- Jetson Robot










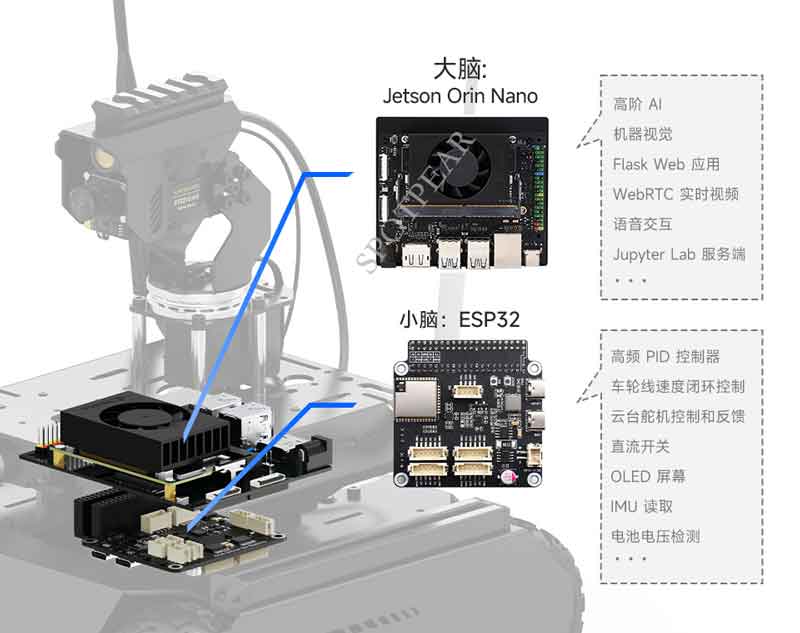
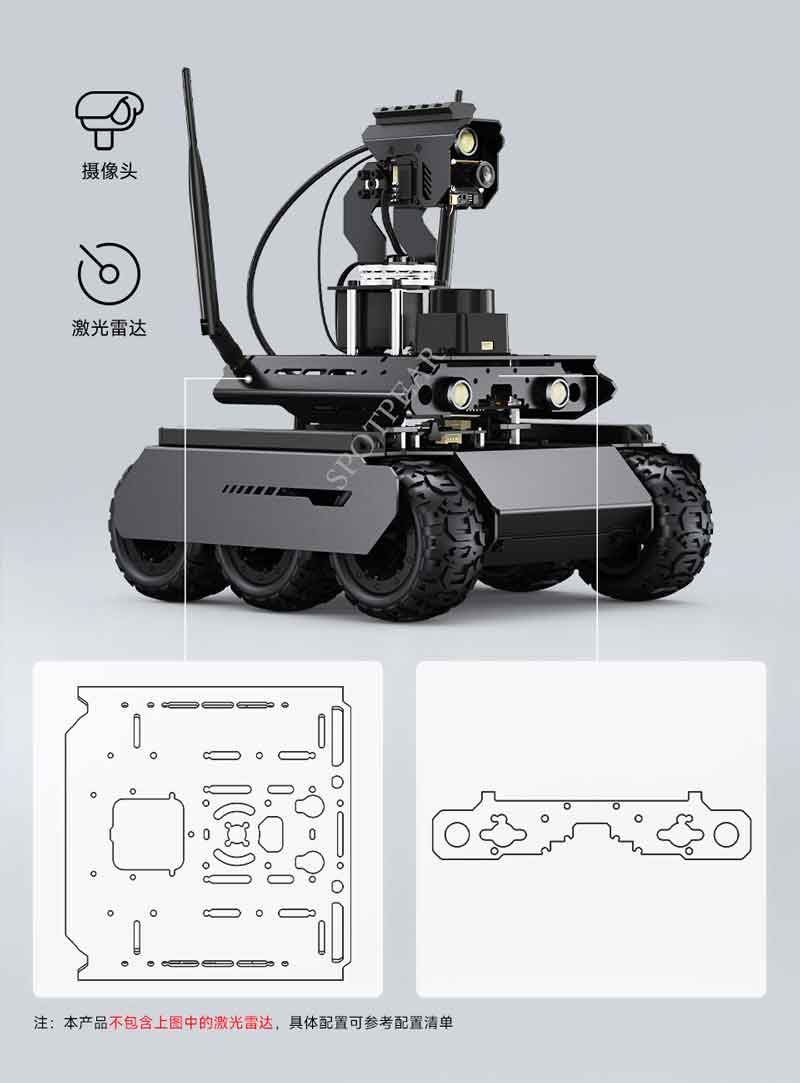
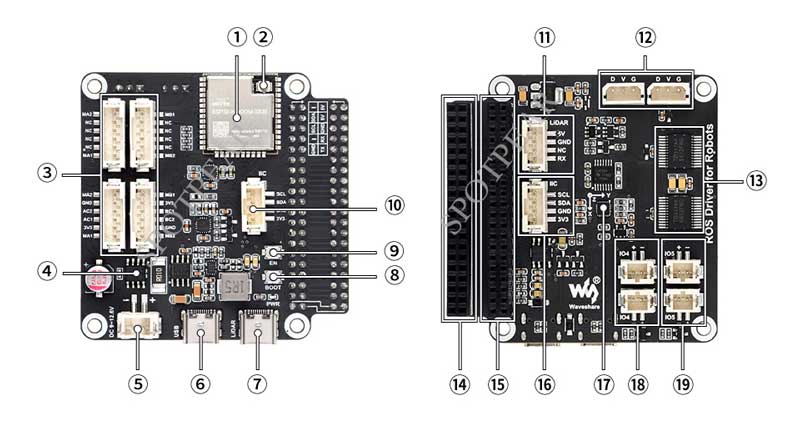
UGV Rover【六轮四驱】开源AI机器人小车OpenCV适用于Jetson Orin
¥4418
制造商:斑梨电子
SKU:0501134
发布时间:2024-07-26 15:41
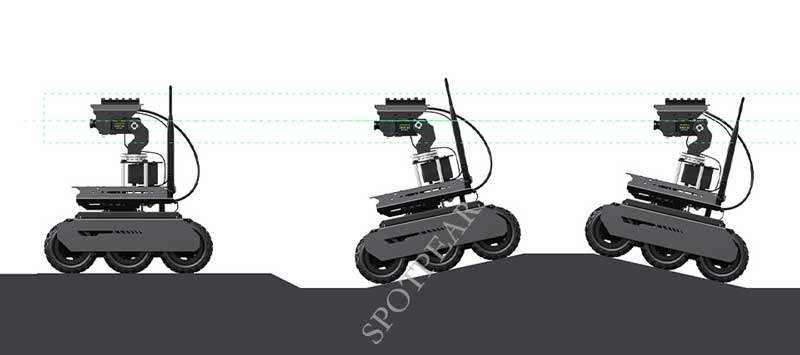
UGV Rover
六轮四驱开源移动机器人,可靠且强大的AI伙伴
伴您解锁创新的无限潜力