

RoArm-M2-S 使用教程
产品介绍
这是一款专为创新应用而设计的四自由度智能机械臂。本产品采用轻量化结构,机身仅仅不到850g,却在抓取距离机械臂原点0.5m远的物体时能够承受0.5kg的负载,而且可灵活安装在各类移动平台。它的360°全方位的底座运动范围搭配三个灵活的关节,构建了一个直径达1m的工作空间。
本产品的关节直驱设计提高重复定位精度的同时也提高了结构可靠性,采用创新双驱技术使肩关节的力矩成倍增加。主控模组采用ESP32 MCU,支持多种无线控制方式,提供了灵活的控制接口与丰富的通讯协议,使机械臂可以轻松连接至多种常用设备。同时还兼容ROS2和多种上位机,支持多种无线和有线通信方式。
这款机械臂标配可扩展组件模块,支持自定义打造多功能末端,以满足各种创新应用需求。人性化的可跨平台Web应用和简洁直观的坐标控制模式,大幅降低使用难度。此外,还提供了丰富的图文与视频教程将帮助您快速上手学习和使用这款机械臂。
RoArm-M2-S在轻量化、易用性、扩展性和开放创新等多个维度实现出色平衡,是一款集智能控制、人机交互和可定制开发于一体的多功能机械臂。如果您需要一个兼具灵活性、可扩展性和易用性的解决方案,RoArm-M2-S 将是很好的选择,助您实现更多创新。
产品特性
- 可扩展性:标配多种可扩展组件,支持自定义打造多功能末端,实现机械臂功能扩展,以满足不同创新应用需求。
- 全向工作空间:360°全方位旋转的底座搭配灵活的关节运动,创造直径达1m的工作空间,实现全方位运动自如。
- 易用性:提供跨平台Web应用和坐标控制模式,降低使用难度,使用户能够轻松操作机械臂。
- 开源代码:开源了RoArm-M2-S的控制代码和通信接口文档,方便用户进行二次开发。
- 轻量化结构:采用了碳纤维和5052铝合金,仅仅不到850g的机身,便于灵活安装在各种移动平台。
- 关节直驱设计:使用12位高精度磁编码器来获取关节角度,使得重复定位精度可达0.088°,提高了结构可靠性。
- 双驱技术:创新双驱技术增强了机械臂肩关节的力矩,提升机械臂整体负载能力。
- 强大的主控模组:采用ESP32 主控MCU,支持多种控制接口和无线通信协议。
- 多平台兼容:兼容ROS2和多种上位机,支持多种无线和有线通信方式,为不同的开发和控制需求提供了灵活性。
- 丰富教程资源:提供丰富的图文和视频教程,涵盖多种功能,帮助用户快速上手学习和使用机械臂,从而加速创新应用的实现。
产品展示视频
产品简易使用
使用前注意事项
使用前请务必了解以下内容:
- 本产品出厂时已经组装好,但由于使用的舵机数量比较多,因此不建议拆解该产品。
- 本产品工作电压范围7-12.6V,尽量使用标配的12V 5A电源供电,也可使用3S锂电池供电,注意严禁使用超出产品工作电压范围的电源供电。
- 本产品所使用的舵机扭矩比较大,因而有可能会带来潜在的的风险,使用时要避免眼睛、头部等敏感部位处于舵机的活动范围内。
- 使用该产品时要远离儿童,避免受伤;且该产品不能受到剧烈的撞击。
- 为了安全起见,默认例程的机械臂运行速度比较慢,你可以参考后续教程来更改这个速度,但过低的速度可能会导致机械臂运行到一些特定位置时发生抖动。
认识产品

- 以上两张图是机械臂各个部位以及常用接口的标注。
- 使用配置的12V 5A电源线接入机械臂上的电源接口,打开电源开关,通电即开机,产品各个关节都会自动转动到中位。
- 开机后OLED屏幕上显示内容含义如下:
- 第一行内容表示此时WiFi处于AP模式下,WiFi热点名为RoArm-M2;
- 第二行表示STA模式处于关闭状态,当WiFi处于STA模式时,路由器会分配一个IP地址并显示出来;
- 第三行的内容为本设备的MAC地址,该地址是唯一的,用于ESP-NOW通信,具体使用请参考RoArm-M2-S_ESP-NOW控制教程。
- 开机后使用手机或电脑连接RoArm-M2-S的WiFi:RoArm-M2,密码是12345678,连接WiFi后打开谷歌浏览器,在网址栏中输入192.168.4.1打开Web端使用界面。接下来你就可以使用Web端的功能来控制机械臂了。
Web端使用
按键功能
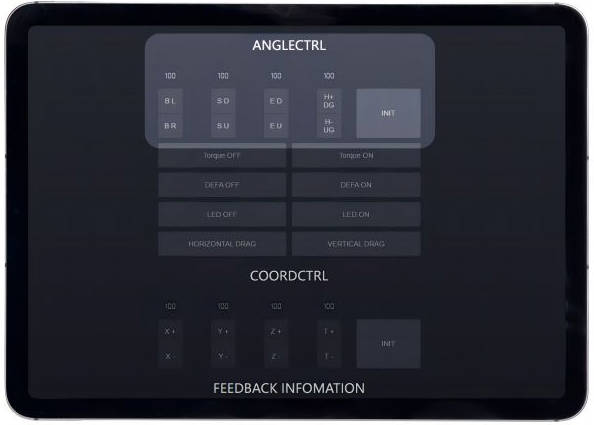
AngleCtrl:舵机角度控制
每一列按钮上面所显示的数字,是各个关节所转动到的角度,以弧度制形式来显示,各个关节的标注见【认识产品】部分中的图。所有显示的数字反馈,只有在按键抬起后才会更新,具体更新见如下转动说明。
1. 第一列"B L"和"B R"控制的是基础关节的转动,转动范围为360°。产品开机后基础关节会自动转动到中位,此时按钮上的数字为0。
- 当一直点击"B L"时,基础关节会向左极限转动180°,数字会由0更新为3.14;
- 再一直点击"B R"时,基础关节会向右极限转动360°,数字会由3.14更新为-3.14。
2. 第二列"S D"和"S U"控制的是肩关节的转动,转动范围为180°。产品开机后肩关节会自动转动到中位,此时按钮上的数字为0。
- 当一直点击"S D"时,肩关节会向前极限转动90°,数字会由0变为-1.57;
- 再一直点击"S U"时,肩关节会往反方向极限转动180°,数字会由-1.57变为1.57。
3. 第三列"E D"和"E U"控制的是肘关节的转动,转动范围为225°。产品开机后肘关节会自动转动到中位,此时按钮上的数字为1.57。
- 当一直点击"E D",肘关节会向下极限转动90°,数字会由1.57变为3.14;
- 再一直点击"E U"时,肘关节会向往反方向极限转动225°,数字会由3.14变为-1.11。
4. 第四列"H+ DG"和"H- UG"控制的是末端关节的转动。末端关节又分为“夹爪”关节和“手腕”关节,具体根据末端执行器形态而定。产品开机后末端关节会自动转动到中位,此时按钮上的数字为3.14。
- 当为“夹爪”关节时,转动范围为135°。
- 点击"H+ DG",“夹爪”关节会抓取,默认情况下为闭合状态;
- 点击"H- DG",“夹爪”关节会张开,最大张开角度为135°,数字会由3.14变为1.08。
- 当为“手腕”关节时,转动范围为270°。
- 当一直点击"H+ DG",“手腕”关节会向下极限转动135°,数字会由3.14变为5.20;
- 再一直点击"H- DG",“手腕”关节会向上极限转动270°,数字会由5.20变为1.08。
- 当为“夹爪”关节时,转动范围为135°。
INIT:点击后各关节会复位至产品开机时的中位。
Torque:扭矩锁控制
点击"Torque OFF"代表扭矩锁关闭,关闭扭矩锁后可以在机械臂接通电源的时候手动使关节转动;点击"Torque ON"代表扭矩锁开启,开启后在机械臂接通电源时不可手动使关节转动。
注意:关闭扭矩锁后,若机械臂某一关节或所有接收到其它的转动指令,会自动开启扭矩锁。
DEFA:动态外力自适应控制
点击"DEFA ON"代表该功能开启,开启后使用外力转动机械臂会回弹至转动前的位置;点击"DEFA OFF"代表该功能关闭。
LED:LED灯控制
点击"LED OFF"代表LED灯关闭;点击"LED ON"代表LED灯开启。
HORIZONTAL DRAG:水平平面绘画
页面具体操作请参考【Hotizontal Drag使用说明】部分。
VERTICAL DRAG:垂直平面绘画
页面具体操作请参考【VERTICAL Drag使用说明】部分。
COORDCTRL:机械臂末端关节末端点坐标控制
X、Y和Z分别代表的是机械臂“夹爪/手腕”关节末端点的X轴、Y轴和Z轴的位置坐标,T代表的是末端的转动角度(关节形态不一样转动角度不一样,具体可见ANGLECTRL功能中的“H+ DG”那一列的详细描述),这四个都可通过“+-”进行调节。
INIT:点击后末端点会复位至产品开机时的中位。
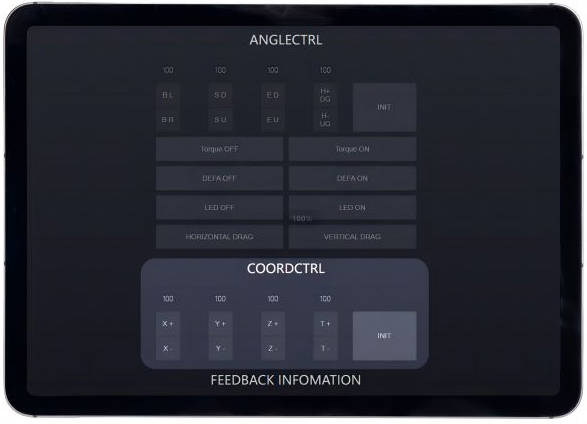
FEEDBACK INFOMATION:信息反馈
在此处输入JSON指令与机械臂进行通信,JSON指令反馈的信息会在这里显示。在这部分以下是机械臂常用的JSON指令快捷输入,点击指令旁的”INPUT“会自动输入到输入框中。JSON指令的具体控制含义请参考RoArm-M2-S_JSON指令含义。

产品初始化
用户需要快速地将产品还原至出厂程序,可以使用我们提供的 RoArm-M2-S 的 ESP32 下载工具。
步骤如下:
1. 点击 RoArm-M2-S 的 ESP32 下载工具进行下载,下载后进行解压缩,双击打开“flash_download_tool_3.9.5.exe”程序。打开后,会弹出两个窗口,我们需要操作的是下载工具的 UI 界面,而另一个窗口作为终端来显示下载工具的工作状态。
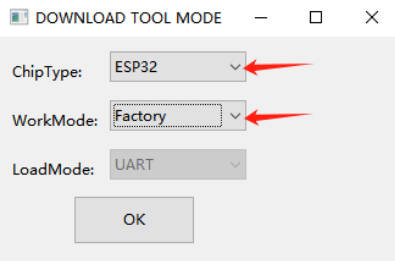
2. 在“DOWNLOAD TOOL MODE”这个界面,Chip Type 选择为 ESP32,WorkMode 选择为 Factory。(使用 Factory,调用二进制文件时才会使用相对路径,就不需要用户手动输入二进制文件路径,选择好后点击 OK。
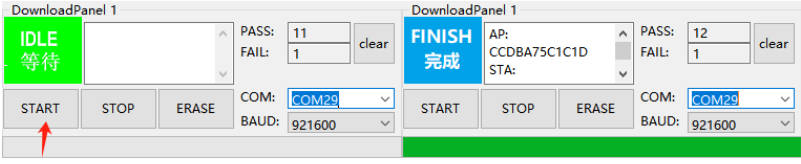
3. 进入下载工具软件界面,右边代表的是可以同时给 8 个机械臂上传程序。用 USB 线将机械臂上的驱动板和计算机连接起来,点击“COM”,选择新出现的 COM(我这里新出现的 COM 为 COM3);BAUD 是用于设置下载速度,越高速度越快,ESP32 最高可以使用 921600。
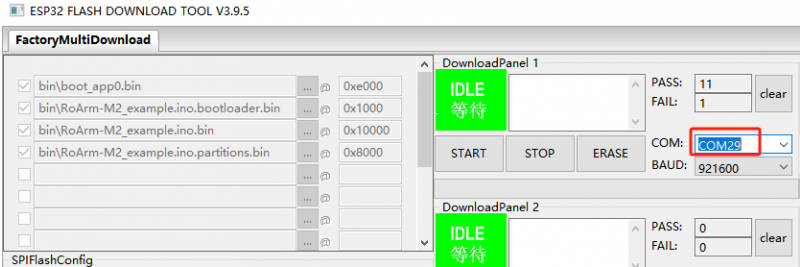
4. 选择好后,点击“START”开始上传程序,上传完成后,“IDLE等待”会变成“FINISH完成”,完成后可以断开驱动板与电脑的 USB 连接,使用配置的 12V 5A 电源线插入机械臂驱动板上的 12V DC 接口,通电后即可控制 RoArm-M2-S 机械臂。
RoArm-M2-S 教程目录
RoArm-M2-S ROS2 Humble + Moveit2 教程
RoArm-M2-S 使用教程
- RoArm-M2-S_Web端使用
- RoArm-M2-S_JSON指令含义
- RoArm-M2-S_WIFI配置
- RoArm-M2-S_机械臂控制
- RoArm-M2-S_末端关节设置
- RoArm-M2-S_FLASH文件系统操作
- RoArm-M2-S_步骤录制和重现
- RoArm-M2-S_ESP-NOW控制
- RoArm-M2-S_Python串口通信控制
- RoArm-M2-S_Python HTTP请求通信
资料下载
机械臂图纸
机械臂STEP模型
机械臂开源程序
串口驱动
软件
驱动板原理图
VirtualBox ROS2镜像
- ROS2 镜像链接【提取码:wxdz】
- 【系统默认密码:ws】
机械臂 ROS2 包
FAQ
问题:1.使用 Web、JSON 指令或 ROS2 控制机械臂没有反应?
答:首先先检查是否给机械臂供电,电源接口标注见【认识产品】部分中的图,插上电源接口后需要看驱动板上的电源开关是否打开;接着检查机械臂上插入的是哪个 USB 接口,需要插入左边的 USB 接口才能进行串口通信,右边的 USB 接口为激光雷达数据接口。若上述检查完毕后还是不能控制机械臂,请咨询技术支持。
问题:2.重新给产品上传程序后,连接WIFI出现密码错误或者其它连接不上的情况,该如何解决?
答:重新烧录过程序,要串口通信发 {"T":604} 这个指令清空 NVS 区之后,再给机械臂重新上电,忘记 WIFI 重新进行连接。
技术支持
周一-周五(9:30-6:30)周六(9:30-5:30)
手机:13434470212
邮箱:services04@spotpear.cn
QQ:202004841

