




Aurora 智见
Aurora 智见,开启一体化定位建图新纪元

产品参数
| 供电电压 | 12V | ||
|---|---|---|---|
| 2D 地图分辨率 | 2cm/5cm/10cm 可调 | ||
| 重定位 | 支持全局重定位 | ||
| 建图定位模式 | 激光+视觉+惯导多源融合 | ||
| 相机规格 | 双目鱼眼 HDR 全局相机,FOV 180°,6cm 基线 | ||
| 相机频率 | 典型 10Hz,可定制 15/30Hz | ||
| 倾斜角度 | 无要求,(为保障 2D 建图效果,建议不超过 30° 倾斜角) | ||
| 测距精度 | ±30mm | ||
| 扫描频率 | 10Hz-20Hz(典型值 10Hz) | ||
| 扫描角度 | 360° | ||
| 采样频率 | 32KHz | ||
| 通讯接口 | Wi-Fi、USB Type-C、1000M 以太网 | ||
| 工作温度 | 0℃~40℃ | ||
| 测量范围 | 白色物体:0.05m~40m (70% 反射率) 黑色物体:0.05m~15m (10% 反射率) / 0.05m~5m (2% 反射率) | ||
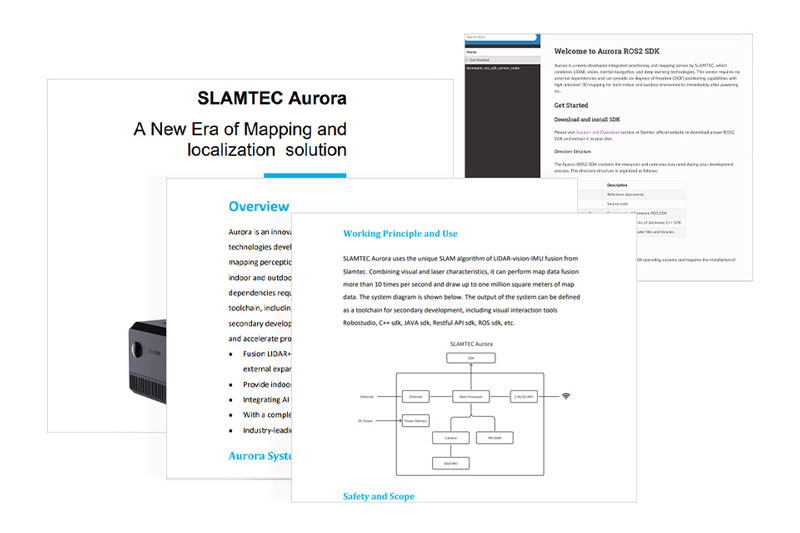
技术文档 & SDK 支持
提供产品手册、使用手册以及不同平台下运行的 SDK 开发包,支持 ROS、ROS2 操作系统,帮助客户在不同的操作系统和架构上进行开发和集成
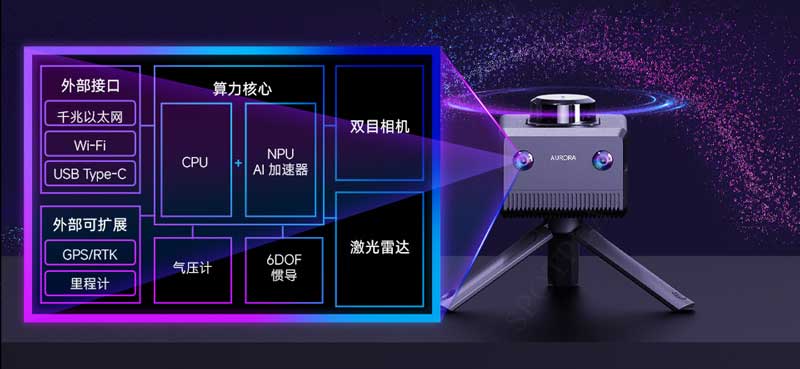
激光视觉与 AI 技术成功融合
融合激光、视觉、惯性导航和深度学习技术
打造出全新的一体化定位与建图感知传感器
AI + SLAM
深度学习加持准确识别特征
Aurora 融合了深度神经网络的导航定位系统,能够从复杂的环境中精准地提取出准确而又简练的特征点,构建出线条流畅、边缘清晰的地图框架
传统特征提取效果
Aurora 深度学习方案
高速运动不慌乱 尽显非凡稳定
得益于深度学习的强大空间定位能力,即使遭遇高速旋转或意外加速,
Aurora 也能始终进行毫秒级的定位捕捉,保持稳定如一

无惧风吹草动 展现优越性能
面对高低起伏的草地环境,Aurora 能够有效排除草地环境中的干扰因素,敏锐地感知环境中的每一处细微特征,持续输出高质量定位和建图数据
传统方案定位丢失

Aurora 方案定位稳定
全面步入 3D 时代
灵活手持随时工作
Aurora 提供完全的 3D、6 自由度的空间定位能力,
无需外部依赖,只要通电,手持即可工作
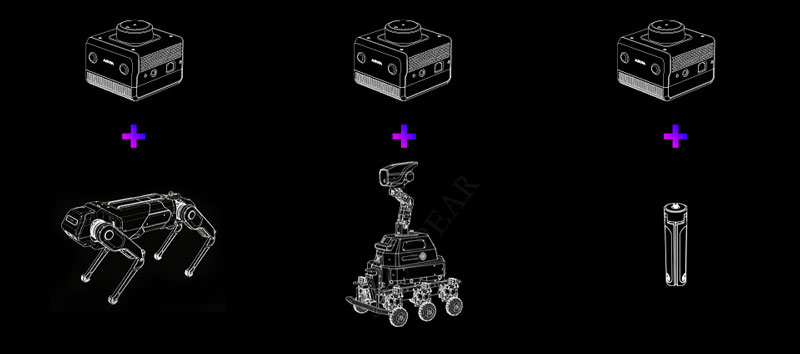
为具身智能而生
从容应对室内外环境
在具身智能时代,Aurora 是人形机器人和多足机器狗的好搭档,
能够从容应对室内外各类复杂环境和地形

无惧黑暗 挑战极速
室内外从容应对
Aurora 可以在高速运动的环境中保持稳定建图定位
即使在黑夜中,Aurora 都能有出色的工作性能
超百万平方米的广域建图能力
上海市内环线全长 47.7 公里,包围面积 120k㎡,
Aurora 可以对上海市实现完整的建图和闭环
同步 2D 高精地图输出
利用机载激光雷达,Aurora 可同步输出高精确度的俯视 2D 激光栅格
地图,方便现有导航算法快速迁移至 3D 环境
室外建图 - 2D 激光输出
室外建图 - 3D 点云输出