舵机电机推荐


























【产品简介】
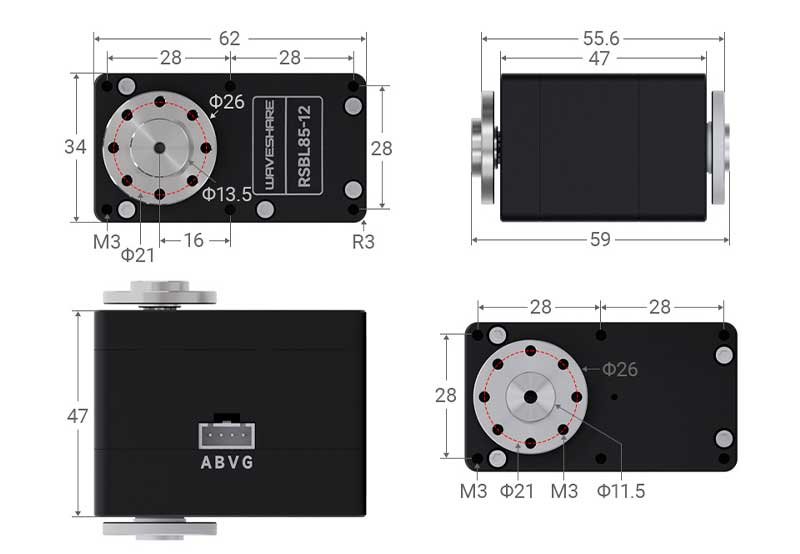
[] 85kg.Cm RSBL85-12 / RSBL85-24伺服电机,高精度大扭矩,铝合金外壳,带可编程360°磁性编码器,多种操作模式可切换
【产品详情】
85KG.CM RS485 金属伺服电机
金属外壳无刷马达 360° 磁编码伺服电机

【可选版本】

【产品参数】
产品型号 RSBL85-12 RSBL85-24 堵转扭矩 85KG.cm@12V 85KG.cm@24V 转动角度 360°(0~4095) 位置传感器分辨率 0.088°(360°/4096) 机构限位角度 无 工作电压 9~12V (典型值 12V) 9~24V (典型值 24V) 齿轮形式 高精度钢质(减速比 1:254) 空载速度 0.167sec/60degree 60RPM 0.154sec/60degree 65RPM 编码器类型 360° 磁编码器 ID 范围 0~253 波特率 38400bps ~ 1Mbps(默认1Mbps) 空载电流 540mA 250mA 堵转电流 7.9A 5.6A Kt 常数 13KG.cm/A 25KG.cm/A 重量 215g 反馈 位置 (Position);负载 (Load);
速度 (Speed);输入电压 (Input Voltage);
工作电流 (Current);工作温度 (Temperature)
速度 (Speed);输入电压 (Input Voltage);
工作电流 (Current);工作温度 (Temperature)