


UART/USB总线舵机驱动板适用于ST/SC系列总线舵机
¥23
本产品是一款总线舵机驱动板,集成舵机供电功能和舵机控制电路,提供了不同语言控制总线舵机的例程,并且支持对舵机进行编程改变舵机的ID和工作模式(舵机模式/电机模式)等,理论上可以控制253个总线舵机并且读取每个舵机的当前角度、负载、电压、模式等信息,可以使用串口连接到上位机来控制总线舵机转动,适用于机械手臂,六足机器人,人形机器人,轮式机器人等需要反馈舵机角度和负载的机器人项目。
舵机电机推荐


























【产品简介】
[] 本产品是一款总线舵机驱动板,集成舵机供电功能和舵机控制电路,提供了不同语言控制总线舵机的例程,并且支持对舵机进行编程改变舵机的ID和工作模式(舵机模式/电机模式)等,理论上可以控制253个总线舵机并且读取每个舵机的当前角度、负载、电压、模式等信息,可以使用串口连接到上位机来控制总线舵机转动,适用于机械手臂,六足机器人,人形机器人,轮式机器人等需要反馈舵机角度和负载的机器人项目。
【产品特性】
[] 用于连接上位机或 MCU 来控制总线舵机转动
[] 可同时控制多达 253 个 ST/SC 系列总线舵机 (前提是供电充分)
[] 9~12.6V 电压输入 (输入电压需与舵机电压匹配)
[] 提供便捷的总线舵机控制解决方法
[] 集成稳定的控制电路,确保总线舵机稳定运行
[] 迷你小巧,节省空间,适合嵌入到各种对空间要求较高的项目当中
【产品参数】
[] 供电电压:DC 9~12.6V(ST 系列舵机)
[] 供电接口:5.5*2.1mm DC
[] 通信接口:UART
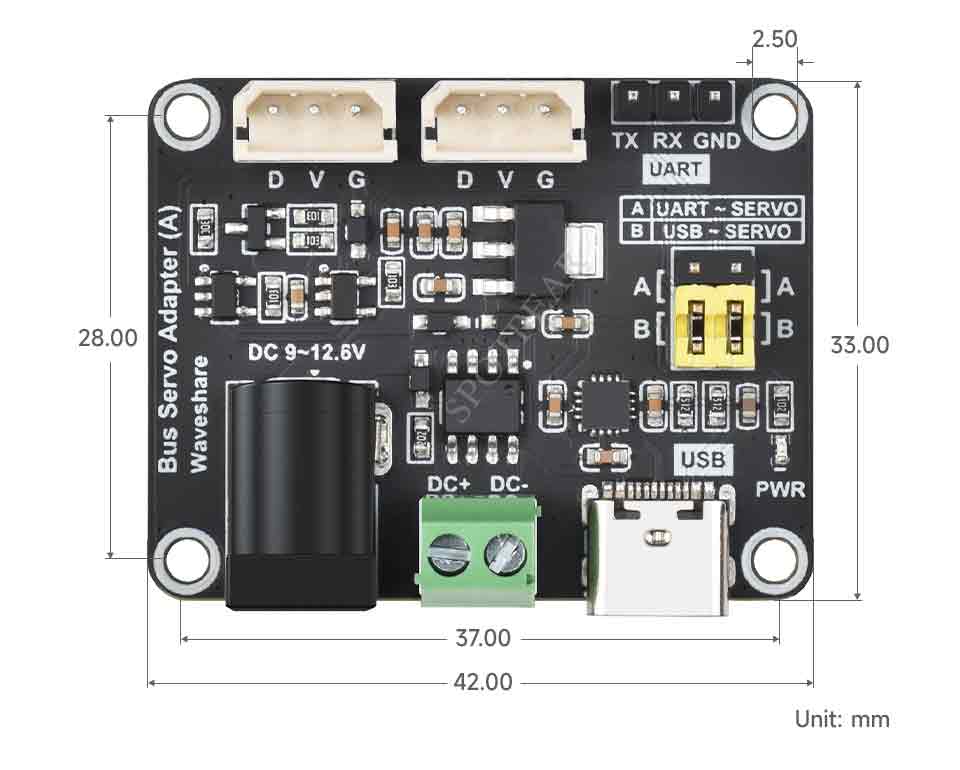
[] 产品尺寸:42.00 × 33.00mm
[] 定位孔直径:2.50mm
[] 定位孔间距:37.00 × 28.00mm
【主要用途示意】
[] 可反馈舵机多种信息:位置、速度、扭矩锁、运行模式 (舵机模式,伺服电机模式等) 可用于需要闭环自动控制的高级项目
[] 可用于搭建四足、六足、机械臂等需要多个舵机的机器人项目
[] 迷你小巧,适合嵌入到对空间要求较高的机器人项目当中

图片仅供展示,具体配置请参考配置清单
【支持控制多种总线舵机】
[] 支持控制 ST/SC 系列总线舵机,直流供电接口直接为舵机供电,可以根据所使用的舵机来选择对应的供电电压

说明:不建议 ST 系列和 SC 系列舵机混用,同系列舵机不同型号同时使用时需注意电压是否同时符合所有舵机的要求
【使用串口总线控制】
[] 可同时控制多达 253 个 SC、ST 系列总线舵机,并可以读取每个舵机的工作状态和多种信息反馈
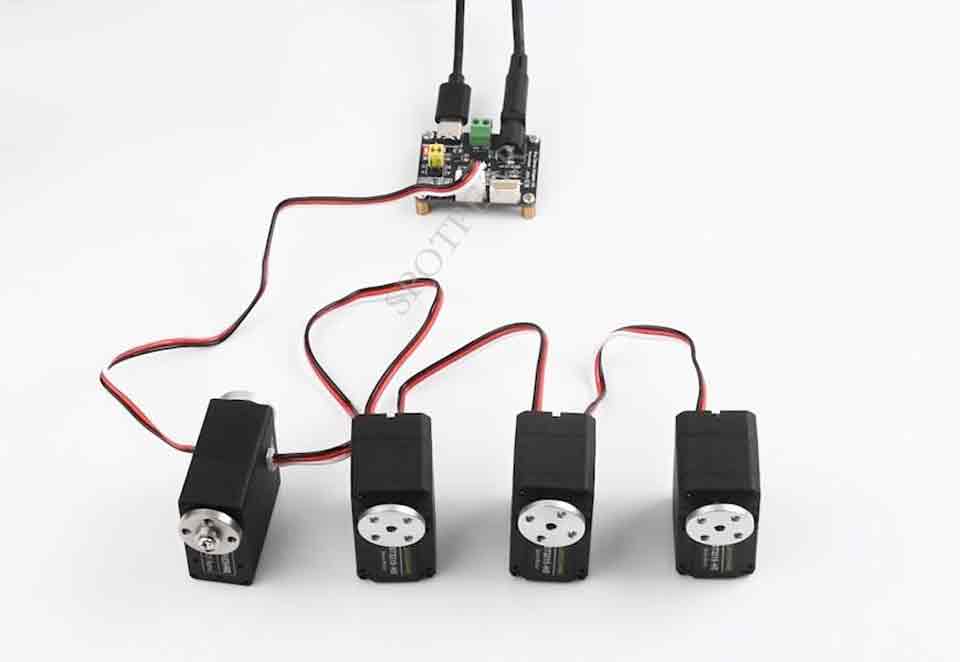
注意事项:
一路 UART 可以控制 253 个总线舵机,但是由于舵机功率较大,当使用过多舵机时需要考虑供电方案能否满足要求
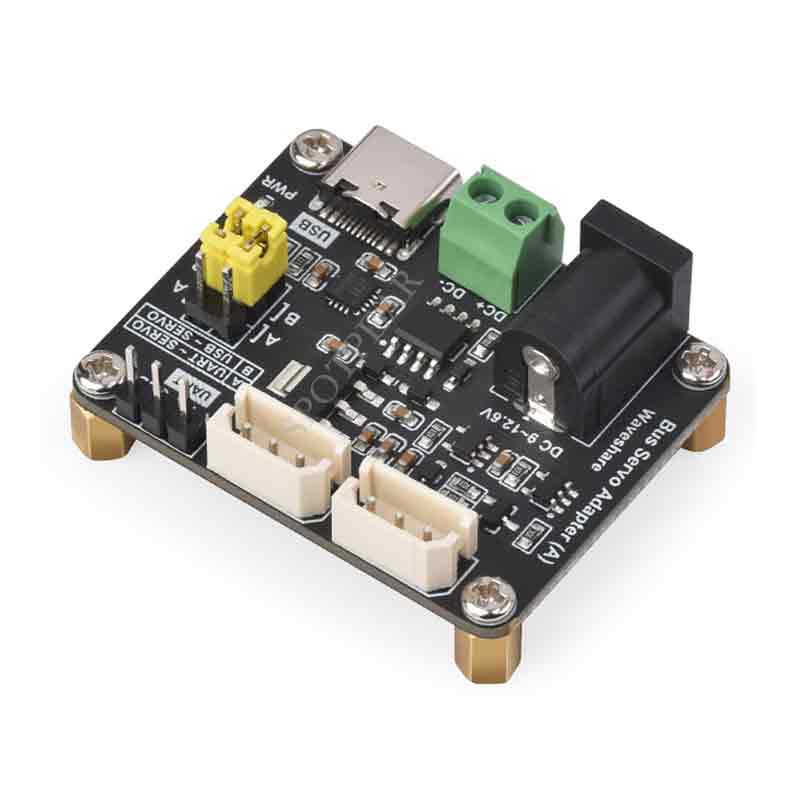
【多种电源输入接口】
[] 板载 DC5521 插座和接线端子,方便集成到现有项目中使用

【支持多种控制方式】
[] 可以通过跳线帽选择 A 或 B 来切换控制方式
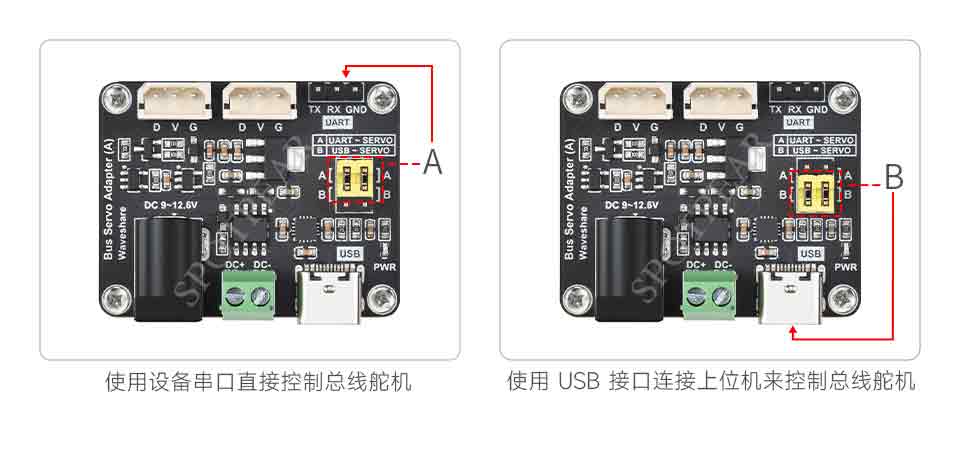
【通过 USB 控制 易于使用】
[] 只需将驱动板通过 USB 线与上位机连接,即可轻松实现总线舵机的控制与舵机数据回传,加速项目原型搭建

【通过 UART 控制 适用面广】
[] 对于没有 USB 接口的设备,可以通过串口连接来直接控制总线舵机,并提供适用于多种硬件平台的 SDK,详情可参考本产品 WIKI 页面
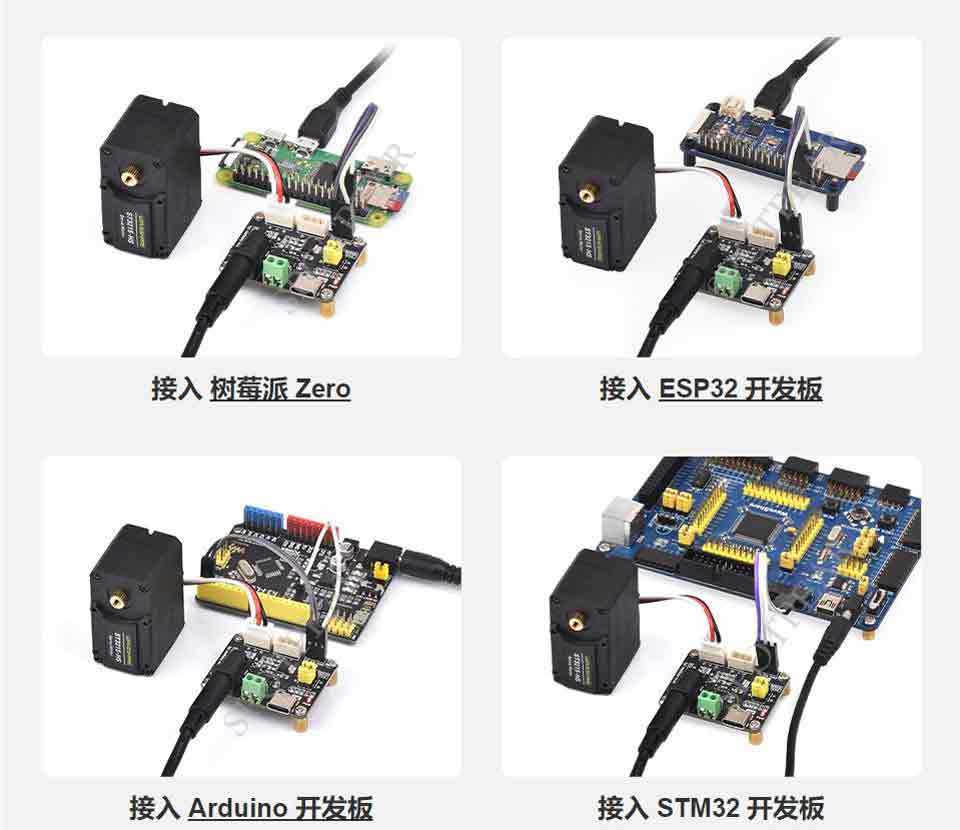
图片仅供展示,本产品不含以上舵机、主板或主机
【接口简介】
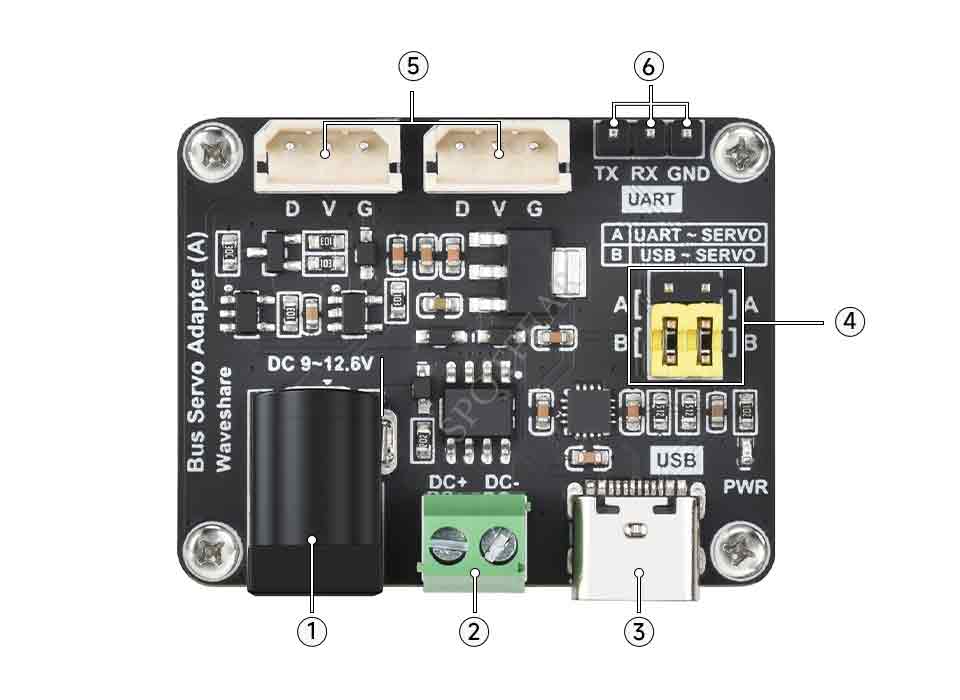
1. 5.5*2.1 DC 供电接口
2. 电源接线端子
3. USB Type-C 接口
4. 控制方式转换接口
5. 总线舵机控制接口
6. UART 通信接口
【产品尺寸】