UART串行总线舵机ST3215 TTL 30KG.CM 360°磁编码器高精度大扭矩
¥106
舵机电机推荐




















【产品参数】
[] 产品类型:ST3215 Servo 总线舵机
[] 产品扭矩:30kg.cm@12V
[] 转动角度:360° (0~4095)
[] 位置传感器分辨率:360° / 4096
[] 机构极限角度:无限制
[] 工作电压:6 ~ 12.6 V
[] 齿轮形式:高精度金属齿轮
[] 空载速度:0.222sec / 60° (45RPM)@12V
[] 编码器类型:360°磁编码器
[] ID 范围:0 ~ 253
[] 波特率:38400 bps ~ 1 Mbps (默认 1 Mbps)
[] 反馈:位置(Position);负载(Load);速度(Speed);输入电压(Input Voltage)
[] 空载电流:180 mA
[] 堵转电流:2.7 A
[] Kt 常数:11kg.cm/A
【主要用途示意】
[] 舵机可反馈多种信息:位置、速度、扭矩锁、运行模式 (舵机模式,伺服电机模式等) 可用于需要闭环自动控制的高级项目
[] 可用于搭建四足、六足、机械臂等需要多个舵机的机器人项目 (本产品提供下图中的机器狗开源结构模型)

图片仅供参考,具体配置以配置清单为准
【使用串口总线控制】
[] 可同时串联多达 253 个舵机

注意事项:
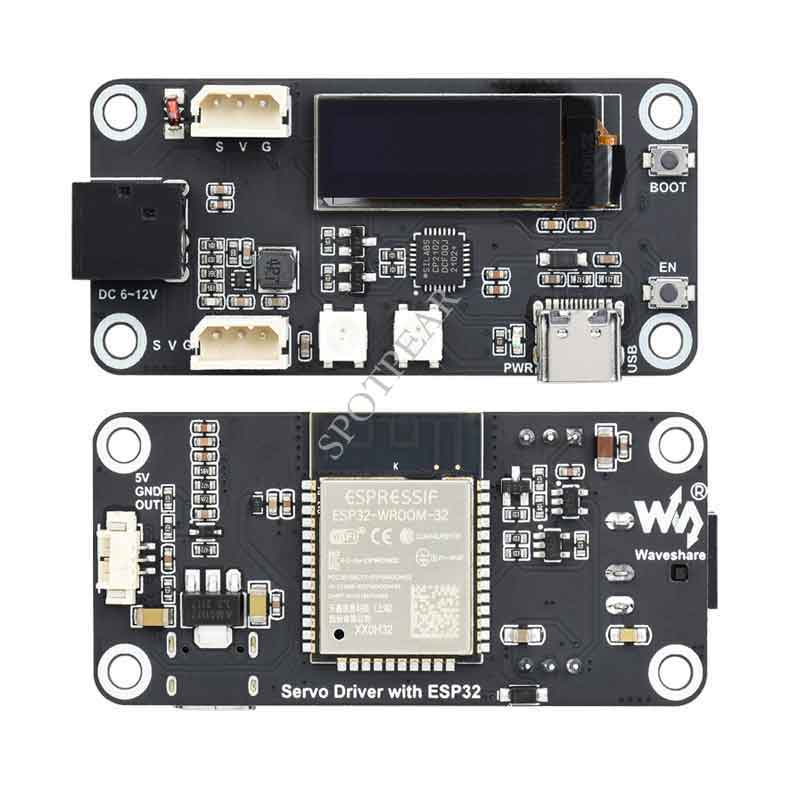
一路 UART 可以控制 253 个总线舵机,但是由于舵机功率较大,当使用过多舵机时需要考虑供电方案能否满足要求。本产品不含图中的 舵机主控板,如有需要,请另行购买
【大扭矩“力士”】
[] 电压 12V 时,扭矩可达 30kg.cm,可用于搭建四足、六足、机械臂等需要多个舵机的机器人项目,轻松搞定大块头

图片仅供参考,具体配置以配置清单为准
【360°磁编码器 高精度 高寿命】
[] 采用 12 位高精度磁编码角度传感器。相对电位器,角度扩大至 360°,分辨率提升 4 倍。由于磁编码器元件与径向磁铁之间有空隙,没有摩擦,所以有效延长了舵机使用寿命

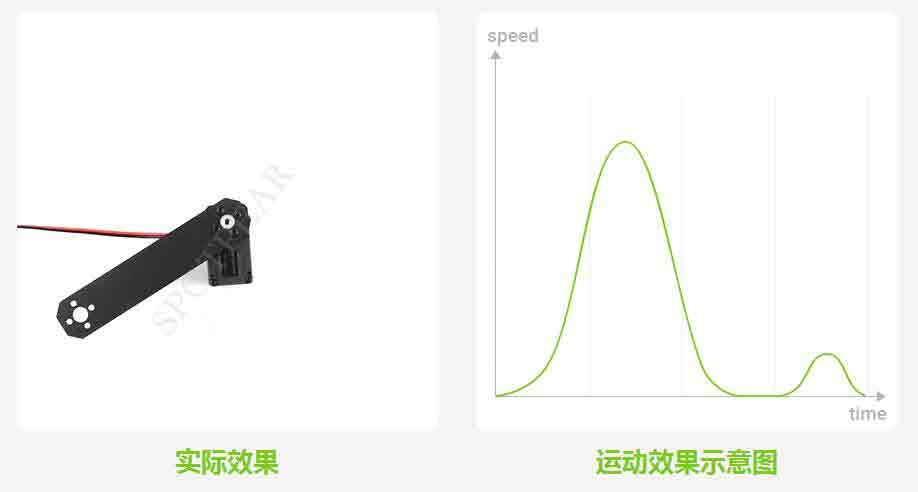
【加速度启停功能】
[] 可设定速度和加速度值,运动效果更加柔和
【紧凑的结构设计】
[] 外壳采用强度更高的工程塑胶外壳和双轴矮壳的结构设计,优化双轴舵盘所在平面间距,整体结构更加紧凑,可以使产品外观更加美观
【一键校准中位】
[] 360° 任意位置安装,一键矫正当前位置为中位 非常方便安装

图片仅供参考,具体配置以配置清单为准
【双向反馈】
[] 舵机可实时反馈位置、负载、速度以及输入电压等信息,时刻掌控

图片仅供参考,具体配置以配置清单为准
【舵机 or 电机 双模式切换】

图片仅供参考,具体配置以配置清单为准
【细节剖析】

【开源控制例程】
[] 开源了舵机驱动板 Web 端控制例程并提供二次开发教程,可以直接用于远程设置和遥控舵机,同时我们也提供了三维模型,可快速搭建自己的项目

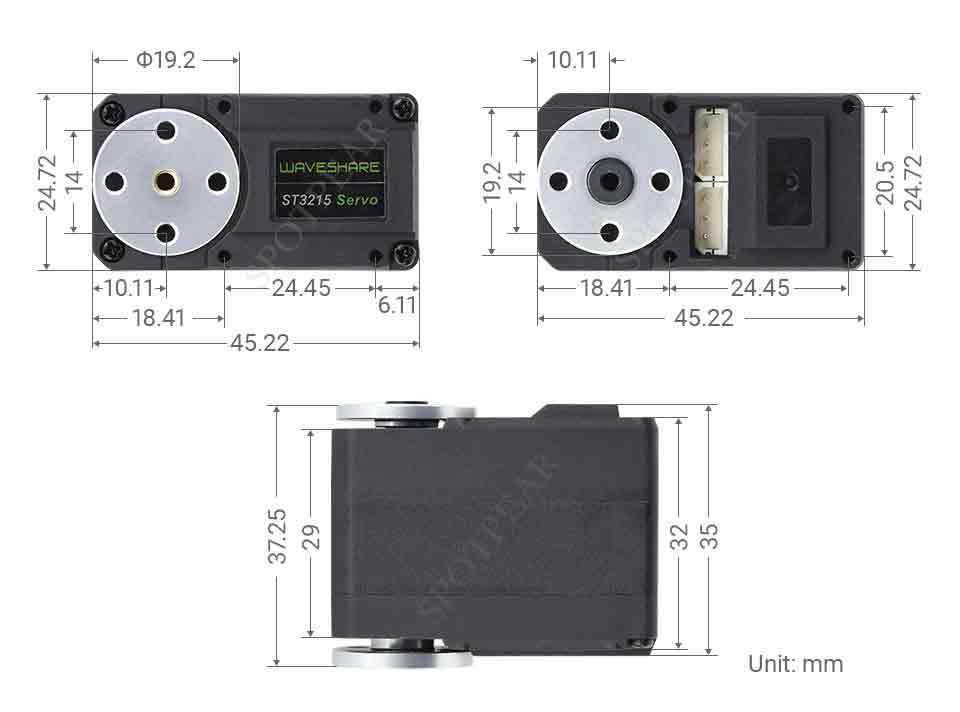
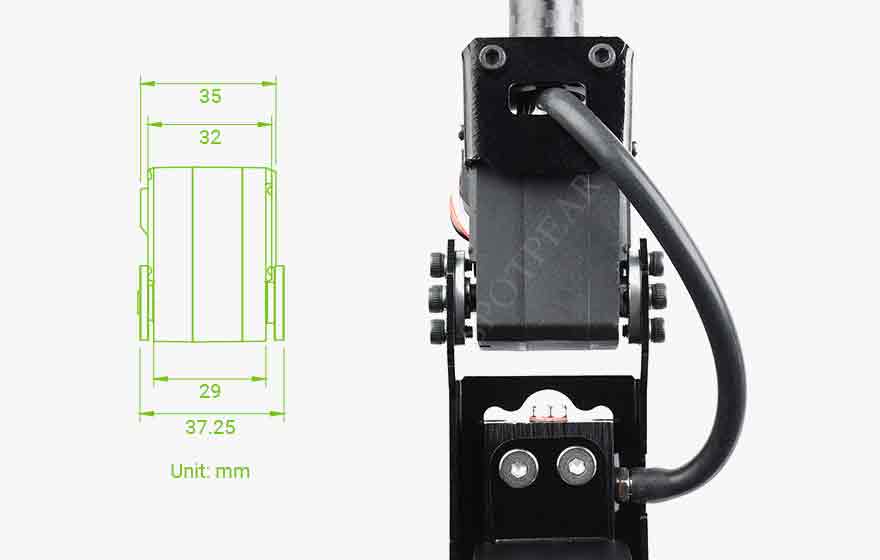
【产品尺寸】