舵机电机推荐



















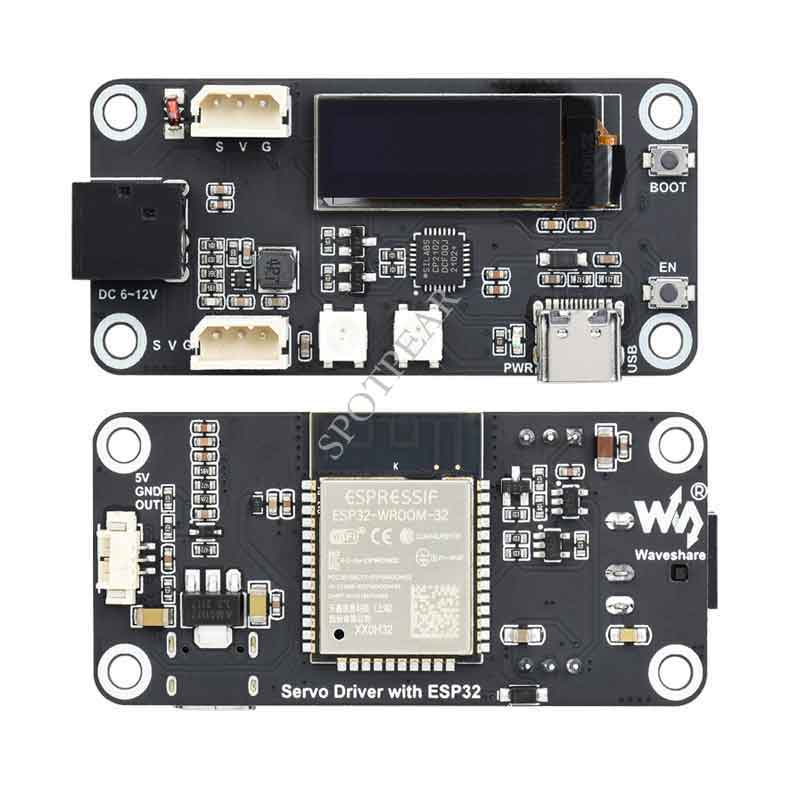







【产品简介】
[] RS485 大扭矩金属伺服电机
[] 35KG.cm 或 45KG.cm 扭矩可选
[] 金属外壳无刷马达 | 360° 磁编码伺服电机

【版本选择】

【产品参数】
产品型号 RSBL35-24-HS RSBL45-24 堵转扭矩 35KG.cm@24V 45KG.cm@24V 转动角度 360° (0~4095) 位置传感器分辨率 0.088° (360°/4096) 机构限位角度 无 工作电压 9 ~ 24V (典型值 24V) 齿轮形式 高精度钢质
(减速比 1:232) 高精度钢质
(减速比 1:353) 空载速度 0.087sec/60degree 115RPM@24V 0.142sec/60degree 70RPM@24V 编码器类型 360° 磁编码器 ID 范围 0~253 波特率 38400bps ~ 1Mbps (默认1Mbps) 空载电流 200mA 160mA 堵转电流 1.8A 2.3A Kt 常数 19kg.cm/A 重量 190g 100g 反馈 位置 (Position);负载 (Load);速度 (Speed);输入电压 (Input Voltage);工作电流 (Current);
工作温度 (Temperature)
【坚固耐用的结构设计】
(减速比 1:232)
(减速比 1:353)
工作温度 (Temperature)
[] 全铝合金外壳 + CNC 精工制造
[] 提高伺服电机外壳的耐热性、尺寸稳定性、刚性和机械性能
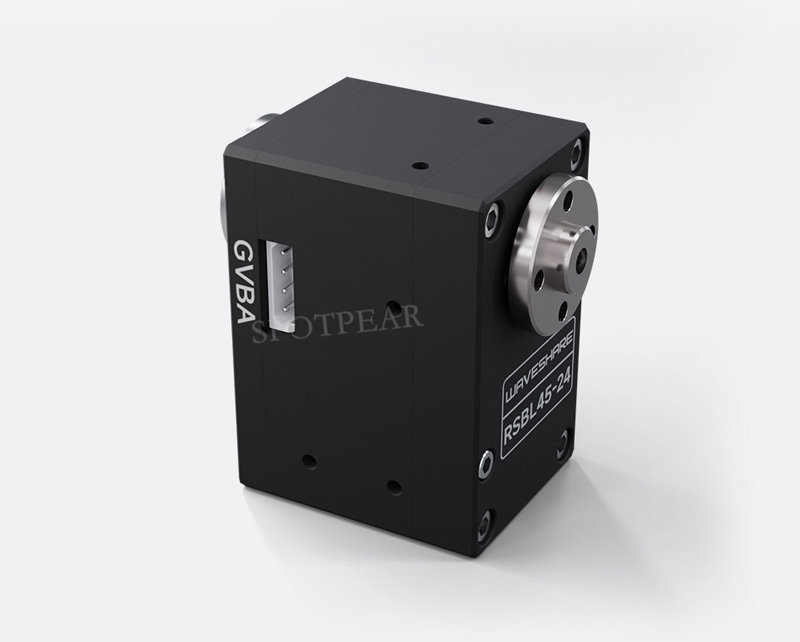
【无刷电机 + 钢制波箱】
[] 搭载优质无刷电机和耐用钢制波箱,保证伺服电机动力传输的强度和耐久性

【高精度 360° 磁编码器】
[] 采用 12 位高精度磁编码角度传感器。相比碳膜电位器,磁编码器的可使用角度扩大至 360°,分辨率提升 4 倍。由于磁编码器元件与径向磁铁之间有空隙,没有摩擦,有效延长了伺服电机使用寿命

【可选择更大的扭矩或更高的转速】
[] 可用于搭建四足、六足、机械臂等需要多个大扭矩伺服电机且对转速要求高的机器人项目,兼顾力量与灵活性

注:本产品不含图中所展示的机械臂,但提供开源的模型图纸 , 具体配置可参考配置清单
【串行总线连接】
[] 可同时串联多达 253 个舵机,实现布线结构简单,占用端口少
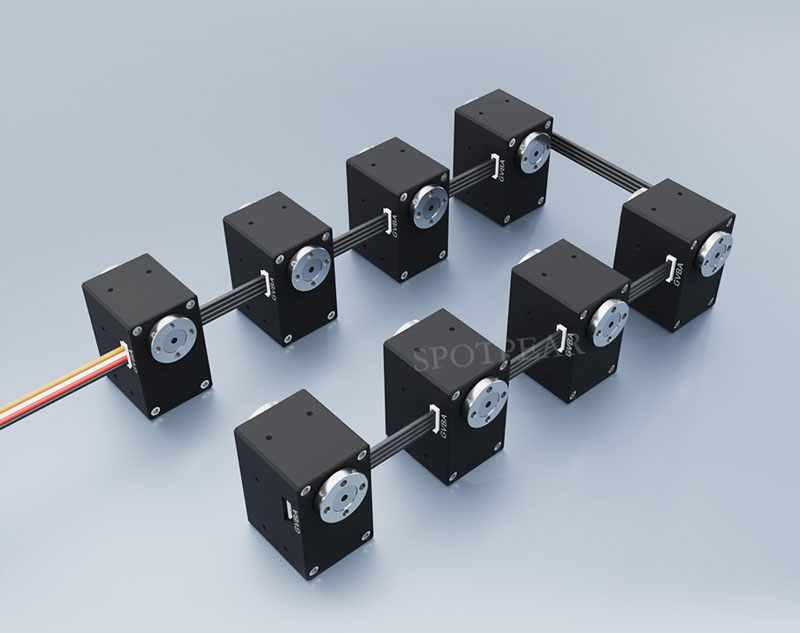
注意事项:一路 UART 可以控制 253 个总线舵机,但是由于舵机功率较大,当使用过多舵机时需要考虑供电方案能否满足要求。
【加速度启停功能】
[] 可设定速度和加速度值,运动效果更加柔和,减少惯性带来的冲击力
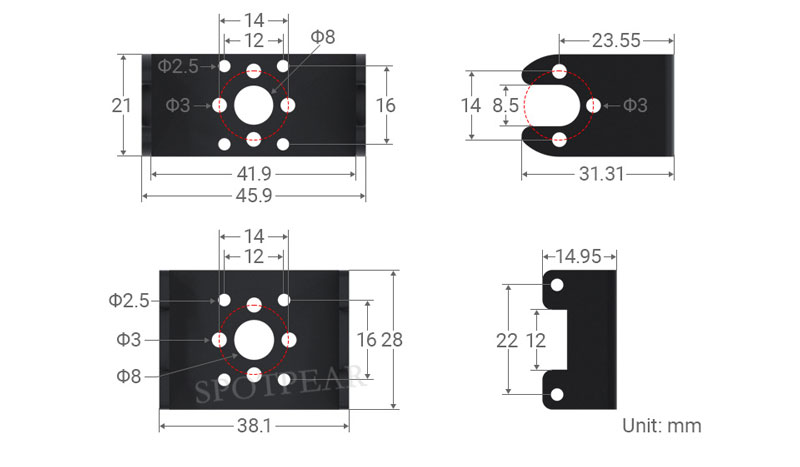
【任意角度安装,一键校准中位】
[] 360° 任意位置安装,直接安装后通过位置校正补偿到中间位置
方便安装和调试
点击 Release 解锁,然后转动伺服电机到需要设置中位的角度
点击 Set Middle Position 设置中位
伺服电机转到任意角度,点击 Middle,伺服电机会自动回到初始设定的中位
【闭环反馈,实时保护】
[] 伺服电机可实时反馈位置、负载、速度、输入电压、电流和温度信息
[] 当环境发生变化如:堵转、温度超限,会启动卸力保护

【多种运行模式 更丰富的适用场景】
[] 角度伺服模式
默认此模式,0~360° 角度位置可控
[] 电机恒速模式
该模式负载改变,速度智能调控且可维持转速
[] 步进模式
可以相对当前位置进行步进运动